

КП / МУ КП
.pdfде RЯ RЯ RТП – повний активний опір кола якоря (без дроселю);
cН kФН – електромагнітна стала машини постійного струму при номіна-
льному потоці; може бути обчислена як відношення номінального моменту МН до номінального струму ІН якоря двигуна, або як відношення номінальної ЕРС
ЕН до номінальної швидкості Н двигуна:
cН |
M H |
EH ; |
|
|
|
(3.15) |
||
|
|
IH |
H |
|
|
|
|
|
Еd0 – ЕРС холостого хода перетворювача при куті керування =0: |
|
|||||||
Еd 0 kcx Еф; |
|
|
|
|
(3.16) |
|||
kcx – коефіцієнт схеми ТП: |
|
|
|
|
|
|||
k |
cx |
Еd 0 |
m |
2 |
sin |
|
; |
(3.17) |
|
Еф |
|
|
|
6 |
|
|
|
т– пульсність схеми ТП (для трифазної мостової схеми т=6, отже, kcx=2,34). Повна індуктивність якірного кола, яка необхідна для забезпечення ре-
жиму гранично-неперервного струму Id.гр на швидкості min [3]
L необх |
0,46Eф sin max |
(3.18) |
|
cmId.гр |
|||
|
|
Величиною граничного струму Id.гр задаються в залежності від режимів роботи привода. Зазвичай вона складає 2...15% (практично – 7...10%) від номінального струму [10].
Отримавши з (3.18) значення L необх , легко знайти потрібну величину ін-
дуктивності згладжувального дроселя:
(3.19)
Якщо вийшло так, що Lдр 0, робиться висновок про відсутність необхідності у встановленні згладжувального дроселя. В протилежному випадку (Lдр 0 ) за даними [16] обирається згладжувальний дросель ближчої більшої індуктивності із номінальним струмом, що відповідає струмові якоря двигуна. Його активний
21

опір Rдp визначається за відомою з каталогу величиною втрат в міді обмотки дроселя Pдp.акт від номінального струму дроселя Ідp.Н :
R |
Pдp.акт . |
(3.20) |
дp |
Iд2p.H |
|
|
|
Для ТП, що живить обмотку збудження, розрахунок виконується аналогічно, але, з оглядом на значно більші значення параметрів Rзб і Lзб обмотки збудження, а також на відсутність потреби у встановленні згладжувального дроселя окремими складовими (часто – усіма) опорів ТП зневажають.
Наприкінці розрахунку слід зобразити зовнішні характеристики ТП (сімейство кривих Ed Ed 0 cos Id RТП при Id const ), отримання яких дозво-
лить забезпечити потрібний діапазон регулювання швидкості D.
3.4.3 Розрахунок параметрів об’єкта регулювання.
На підставі попередніх розрахунків стають відомими сумарні параметри кола якоря (RЯ , LЯ ) і (або) кола збудження (Rзб , Lзб ).
Перед виконанням остаточного розрахунку параметрів об’єкта регулювання (ОР) рекомендується накреслити його структурну схему і помітити на ній усі параметри, значення яких мають бути розраховані. В найбільш загальному випадку параметрами ОР є:
активні опори RЯ і Rзб обмоток двигуна;
електромагнітні сталі часу обмоток двигуна: TЯ LЯ  RЯ – кола якоря; Tзб Lзб
RЯ – кола якоря; Tзб Lзб  Rзб – кола збудження; Tвс Lзб
Rзб – кола збудження; Tвс Lзб  Rд – кола віхрових струмів [часто береться приблизно рівною (0,05...0,10)Tзб ];
Rд – кола віхрових струмів [часто береться приблизно рівною (0,05...0,10)Tзб ];
сталі двигуна cН і k – обчислюються за (3.15);
|
коефіцієнт пропорційності kФ ФН Ізб.Н |
між струмом збудження і магніт- |
||
|
ним потоком на лінійній ділянці кривої намагнічування; |
|||
|
механічна стала часу двигуна T |
JR |
Я |
с2 ; |
|
M |
|
Н |
|
|
обирають сталі часу ТП в колах якоря і збудження TТП 0,005 0,010 с; |
|||
22
коефіцієнти підсилення ТП за керуванням kТП Ed 0 UK.max , виходячи з максимальної напруги кіл керування UK.max 10 В.
UK.max , виходячи з максимальної напруги кіл керування UK.max 10 В.
3.4.4 Організація зворотних зв’язків за регульованими координатами
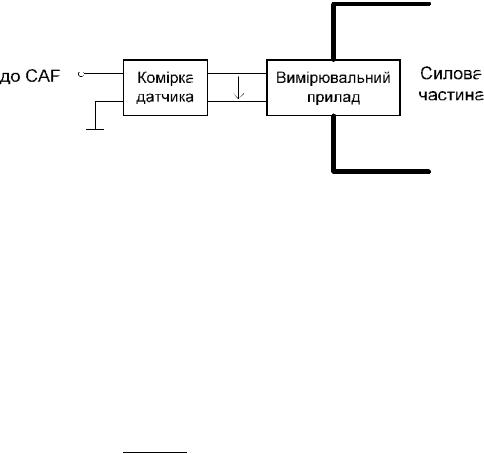
3.4.4.1 Вимірювання електричних величин.
Вимірювання електричних величин (напруги та струму) виконується за досить простими схемами, як зображено на рис.3.4. В якості вимірювального приладу (ВП) при вимірюванні постійного струму зазвичай виступає шунт (рідше застосовуються вимірювальні трансформатори струму на боці змінного струму ТП), при вимірюванні напруги – дільник напруги. Вихідна напруга ВП UВП потрапляє до комірки датчика (КД), призначеної для гальванічного розв’язання силових кіл і кіл керування, одночасно узгоджуючи рівні напруги UВП з напругою кіл керування.
UЗЗ UВП
Рис.3.4. Схема вимірювання електричних величин (напруги або струму).
Коефіцієнт передачі зворотного зв’язку за напругою (або струмом) визначається як добуток коефіцієнтів підсилення елементів, що до нього входять:
kU kBПkКД , (3.21)
де kКД – коефіцієнт передачі КД; звичайно для уніфікованих серій комірок можна прийняти
kКД |
|
UК.max , |
(3.22) |
|
|
UВП.max |
|
де UК.max – максимальна напруга кіл керування; звичайно визначається мак-
симальною напругою вхідних і вихідних кіл операційних підсилювачів (ОП),
23
котрі застосовані при реалізації САР (наприклад, при використанні ОП типу К552УД2, на базі якого в курсовому проекті проектуються комірки регуляторів САР, UК.max =10 В).
Тут вже слід врахувати, що комірки аналогових датчиків УБСР-АИ, що будуть застосовуватись при розробці принципової схеми САР, мають технічні характеристики [16], відповідно до яких коефіцієнт передачі комірки датчика напруги ДН-2АИ може бути в діапазоні 0,6...1,0, а коефіцієнт передачі комірки датчика струму ДТ-3АИ – у діапазоні 53,3...133,3. Конкретні значення коефіцієнтів передачі встановлюються шляхом відповідного обрання параметрів елементів комірок.
У формулі (3.21) kBП – коефіцієнт підсилення ВП. Якщо вважати його характеристику лінійною, то kBП можна визначити як відношення максималь-
ного значення вимірюваної величини (Umax або Imax ) до максимального зна-
чення напруги на виході ВП UВП.max (відома з технічної характеристики ВП):
kBП U ВП. max . |
(3.23) |
|
|
Umax |
|
Отже, датчик напруги (або струму) на структурній схемі може бути пред- |
||
ставлений у вигляді пропорційної ланки з коефіцієнтом передачі |
|
|
k |
UК. max , |
(3.24) |
U |
Umax |
|
|
|
|
який визначається як відношення максимальної напруги кіл керування до максимально можливого в системі значення величини (напруги або струму), що вимірюється.
Більшу складність представляє організація зворотних зв’язків за ЕРС двигуна і за швидкістю.
3.4.4.2 Вимірювання ЕРС.
Схема реалізації датчика ЕРС має вигляд, представлений на рис.3.5.
Для обчислення ЕРС двигуна потрібна інформація про поточні значення напруги і струму, яка отримується від відповідних датчиків. Якщо вихідні на-
24
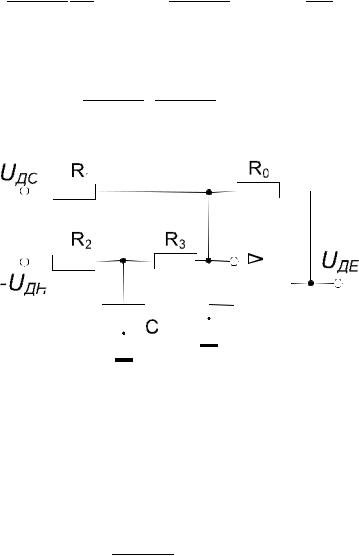
пруги датчиків напруги і струму становлять U ДН kU uЯ , U ДС kІіЯ , то слід забезпечити такі параметри схеми рис.3.5, щоб
R2 R3 |
kI |
R |
Я |
; |
|
|
|
R2 R3 |
|
C T |
яд |
|
LЯ . |
(3.25) |
|||||||
R |
k |
|
|
|
|
|
R R |
|
|
|
R |
Я |
|
||||||||
1 |
|
U |
|
|
|
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
||
Тоді вихідна напруга датчика ЕРС буде дорівнювати |
|
|
|
|
|||||||||||||||||
|
|
kU R0 |
|
|
uд p |
|
|
|
|
|
|
|
|
|
|||||||
U ДE p R |
2 |
R |
T |
яд |
p 1 |
RЯi . |
|
|
|
(3.26) |
|||||||||||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.3.5. Схема реалізації датчика ЕРС.
Позначивши kE kU R0 R2 R3 , отримаємо остаточне рівняння інерційного датчика ЕРС:
R2 R3 , отримаємо остаточне рівняння інерційного датчика ЕРС:
|
uд p |
|
|
U ДE p kE |
RЯi . |
(3.27) |
|
Tяд p 1 |
|
|
|
Отже, реалізація датчика ЕРС полягає у забезпеченні для схеми рис.3.5 вимог (3.25) шляхом сумісного вибору відповідних параметрів R1, R2, R3, C. Слід підкреслити, що параметри LЯ , RЯ і Tяд відносяться до тієї ділянки якір-
ного кола, з якої знімається напруга.
При синтезі САР на структурній схемі реальний датчик ЕРС можна замінити еквівалентним, який розташовується у колі зворотного зв’язку за дійсною ЕРС (тобто, сигналу, взятого зі структурної схеми ОР), і має передавальну функцію (ПФ):
25
Wд.е p |
kE |
|
, |
(3.28) |
|
Tяд p |
1 |
||||
|
|
|
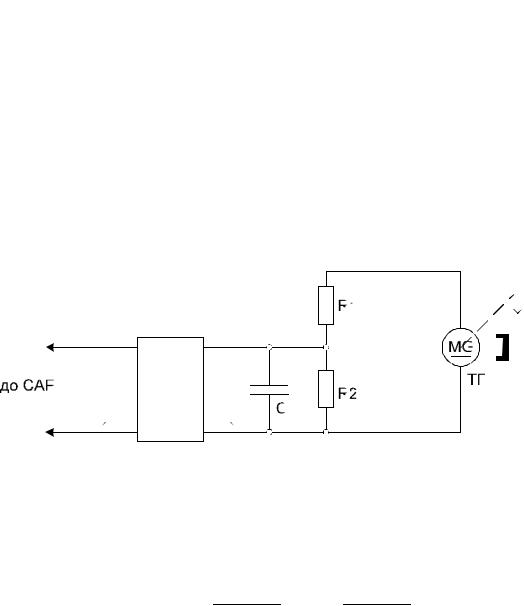
де kE – коефіцієнт передачі датчика ЕРС. 3.4.4.3 Вимірювання швидкості.
При вимірюванні швидкості за допомогою тахогенератора постійного струму (ТГ) звичайно застосовують схему зворотного зв’язку, що наведена на рис.3.6. Схема забезпечує фільтрацію вихідного сигналу ТГ з огляду на наявність в ньому спотворень, викликаними зовнішніми наведеннями, а також оборотними пульсаціями.

UТГ
Uд.ш  Uф
Uф
Рис.3.6. Реалізація зворотного зв’язку за швидкістю.
Отже, ПФ зворотного зв’язку за швидкістю визначається як добуток ПФ елементів, що входять до неї:
W |
p k |
|
|
kд |
k |
|
|
k |
, |
(3.29) |
||
д.ш |
|
ТГ |
|
T |
p 1 |
|
ДН |
|
T |
p 1 |
|
|
|
|
|
|
д.ш |
|
|
|
|
д.ш |
|
|
|
де kТГ – коефіцієнт передачі тахогенератора, рад/(В с); визначається через від-
ношення максимально припустимої вихідної напруги UТГ.max ТГ до його мак-
симальної швидкості max :
k |
ТГ |
UТГ.max ; |
(3.30) |
|
max |
|
k ДН – коефіцієнт підсилення комірки датчика напруги; як вже зазначалося,
при застосуванні ДН-2АИ k ДН = 0,6...1,0.
kд – коефіцієнт передачі дільника напруги:
26

kд |
|
|
R2 |
; |
|
(3.31) |
|
R R |
|
||||||
|
|
|
1 |
2 |
|
|
|
Tд.ш – стала часу фільтра на виході ТГ |
|
||||||
Т |
д.ш |
|
|
R1R2 |
|
С, |
(3.32) |
|
|
R R |
|
|
|||
|
|
|
|
1 |
2 |
|
|
величина якої визначається технічною характеристикою ТГ, і звичайно складає
5...10 мс;
Параметри kд і Tд.ш можуть бути сконструйовані незалежно, оскільки значення параметрів kТГ і k ДН визначаються технічною характеристикою від-
повідно тахогенератора і комірки датчика напруги. В якості вихідної умови при визначенні параметрів схеми рис.3.6 слід узяти бажане значення еквівалентного
коефіцієнту передачі k зворотного зв’язку за швидкістю: |
|
|
k kТГ kдk ДН |
U K.max . |
(3.33) |
|
max |
|
3.5 Синтез системи автоматичного регулювання
Вихідними даними до синтезу є повна структурна схема САР, яка складається на підставі структурної схеми ОР, визначених раніше ПФ датчиків регульованих координат і функціональної схеми системи. В результаті синтезу САР мають стати відомими ПФ усіх регуляторів системи, функціональних перетворювачів, задаючих пристроїв і т.ін.
За допомогою структурної схеми системи виділяються контури регулювання, що містять регулятори, ПФ яких мають бути визначені в результаті синтезу. Оскільки САР швидкості (як і підсистеми регулювання ЕРС у двозонних системах) виконуються за принципом підпорядкованого регулювання, синтез регуляторів потрібно починати з самого внутрішнього контуру.
Порядок синтезу рекомендується виконувати у такій послідовності: 1) зображується структурна схема контуру;
27

2)виділяються малі інерційності (сталі часу) контуру (некомпенсовані) і великі інерційності, що підлягають компенсації регулятором;
3)визначається ПФ регулятора с урахуванням прийнятої умови оптиміза-
ції;
4)оцінюються статичні і динамічні властивості замкненого контуру із синтезованим регулятором.
В якості приклада розглянемо загальний випадок контуру, схема якого зображена на рис.3.7. Об’єкт регулювання містить велику сталу часу T0 , і дві
малі, серед яких одна (T .np ) розташована у прямому каналі контуру, а інша
(T .зз ) – вздовж каналу зворотного зв’язку. Крім того, присутні коефіцієнти
підсилення k0 і k1 у прямому каналі, і kзз – у каналі зворотного зв’язку.
Ux.З kззxЗ |
|
|
|
k0 |
x |
|
|
k1 |
|||
|
|||||
Ux.зз kззx |
|
|
T .np p 1 |
T0 p 1 |
|
|
|
||||
|
|
kзз |
|
|
|
|
|
|
T .зз p 1 |
|
|
Рис.3.7. Структурна схема контуру регулювання.
Як показано у [6], для досягнення умов оптимізації за „модульним оптимумом” (МО) передавальну функцію регулятора слід обрати у вигляді:
WPx p |
T0 p 1 |
, |
(3.34) |
|
k0k1kззTРx p |
|
|
де TPx – стала часу інтегрування розімкненого контуру регулювання:
TPx T .np T .зз |
T .np T .зз 2 T 2.зз , |
(3.35а) |
причому для випадків, коли T .зз T .np T .зз , можна обрати |
|
|
TPx 2 T .np T .зз . |
|
(3.35б) |
28
Передавальна функція (3.34) відповідає пропорційно-інтегральному (ПІ-) регулятору.
Як відомо [6], при такій оптимізації ПФ розімкненого контуру із достатнім степенем точності може бути апроксимована виразом
WKPx p |
|
1 |
, |
|
(3.36) |
|
TРx p T p 1 |
|
|||||
|
|
|
|
|||
а замкненого контуру – виразом: |
|
|
|
|
||
KKPx p |
|
1 kзз |
|
, |
(3.37) |
|
TРx p T p 1 1 |
||||||
|
|
|
||||
де T TPx T .зз 2, TPx 2T |
– еквівалентні мала стала часу і стала часу ін- |
|||||
тегрування розімкненого контуру.
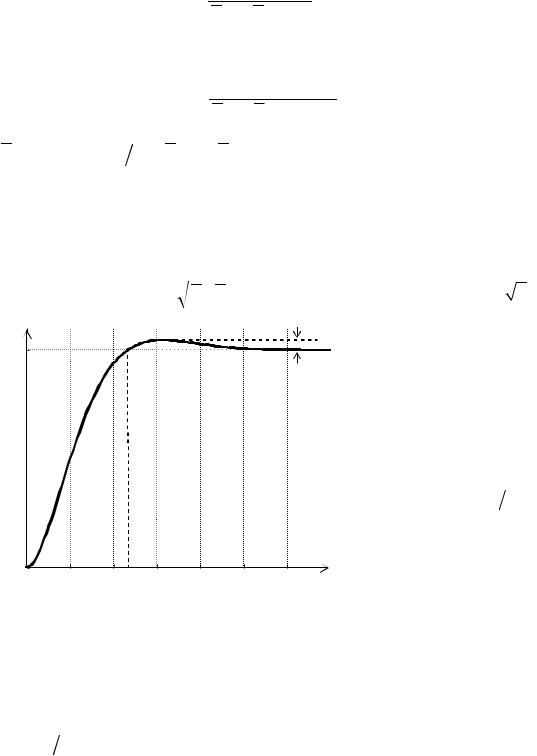
Отже, синтезований таким чином контур є астатичним 1-го порядку, а його динамічні властивості є тотожними динамічним властивостям коливальної
ланки зі сталою часу T |
TPxT |
і коефіцієнтом демпфування |
2 2. Реакція |
|
x |
|
=4,3% |
замкненого контуру на стри- |
|
Ux.З/kзз |
|
|
|
|
|
|
бок завдання U x.З наведена |
||
|
|
|
||
|
|
|
на рис.3.8. |
|
|
|
|
Можливі також випад- |
|
|
|
|
ки, коли в ОР (рис.3.7) за- |
|
|
|
|
мість ланки k0 |
T0 p 1 з ве- |
|
|
tC=4,7T |
|
|
|
t/T |
ликою інерційністю T0 при- |
|
|
|
|
|
|
сутня будь-яка інша динамі- |
|||
0 |
2 |
4 |
6 |
8 |
10 |
12 |
|
|
|
|
Рис.3.8. |
|
|
|
|
чна ланка. Так, якщо це інте- |
|
гратор k0 |
T0 p з великою сталою часу, синтезується пропорційний (П-) регуля- |
|||||||
тор з ПФ WPx p T0 |
k0k1kззTРx . В іншому випадку, якщо в ОР – пропорційна |
|||||||
ланка k0 , |
синтезується інтегральний (І-) регулятор з передавальною функцією |
|||||||
WPx p 1 k0k1kззTРx p . |
|
|
|
|
|
|||
29
За наведеним алгоритмом синтезуються усі регулятори системи, причому при синтезі зовнішніх (2-го, 3-го) контурів основна складність полягає у правильному виборі ПФ ланки k1 T .np p 1 на підставі отриманої раніше ПФ внут-
T .np p 1 на підставі отриманої раніше ПФ внут-
рішнього контуру (3.37). Також, якщо це необхідно, слід вказати рівні, на яких мають бути обмежені вихідні сигнали регуляторів. При необхідності застосування функціональних перетворювачів на етапі синтезу має бути визначена потрібна аналітична залежність, а також графічна залежність, що виконує її кусо- чно-лінійну апроксимацію. Останнім (серед контурів регулювання) синтезується зовнішній контур механічної координати (швидкості або положення), оцінюються статичні і динамічні характеристики системи в цілому.
На даному етапі слід також прийняти рішення щодо необхідності компенсації внутрішнього зворотного зв’язку двигуна за ЕРС. Як відомо [6], цим впливом можна зневажити, якщо співвідношення механічної і електромагнітної сталих часу TM  TЯ 2, і TM T (практично – на порядок).
TЯ 2, і TM T (практично – на порядок).
В САР швидкості (табл.1.1) в залежності від заданих діапазону регулювання швидкості і точності її підтримання на цьому етапі може бути прийняте рішення про необхідність заміни П-регулятора швидкості на регулятор ПІ-типу або (у виключних випадках) – на інерційно-форсуючий (ІФ-) регулятор.
Завершується синтез, як правило, розробкою структури і параметрів задаючих пристроїв – задатчика інтенсивності (ЗІ) або задатчика положення (ЗП). Для цього зображується детальна структурна схема пристрою, і, в залежності від заданих умов розгону (гальмування) визначаються всі її параметри.
3.6 Дослідження роботи системи методом математичного моделювання
У даному розділі за допомогою комп’ютерного моделювання має бути проведене дослідження динамічних режимів синтезованої системи. Рекомендується застосовувати програмний пакет Matlab і його додаток Simulink [17], який вивчається студентами в курсі „Моделювання електромеханічних систем”. У разі необхідності вносяться корективи у налагодження регуляторів.
30