

3. Теоретические сведения.
3.1. Оценка структур по вероятности достижения цели. Предположим, что в процессе исследования проблемы
1) исходная цель Z структуритована и разбита на m подцелей Z1, Z2, …, Zm;
2) построено множество альтернативных структур, состоящее из n возможных вариантов S1, S2, …, Sn;
3) для оценки степени достижения каждой из частных целей Z1, Z2, …, Zm сформировано множество из m критериев K1, K2, …, Km;
4) построена матрица векторных оценок
|
|
S1 |
S2 |
… |
Sn |
|
K1 |
k11 |
k12 |
… |
k1n |
|
K2 |
k21 |
k22 |
… |
k2n |
|
… |
… |
… |
… |
… |
|
Km |
km1 |
km2 |
… |
kmn |
Введем в рассмотрение: Pj – вероятность достижения конечной цели Z j-ой структурой Sj; pij – вероятность достижения промежуточной цели Zi j-ой структурой Sj . Ставится задача: отсеять неперспективные структуры и сформировать множество перспективных структур, состоящее из таких структур Sj, для которых Pj≥p0 (p0 – пороговое значение).
Решение задачи основано на принципе Флейшмана: вероятность достижения цели Z не превышает вероятности достижения частной цели Zi, т. е.
![]() .
.
С этой целью:
1. Матрица векторных оценок приводится к безразмерному виду:
|
|
S1 |
S2 |
… |
Sn |
|
K1 |
ρ11 |
ρ12 |
… |
ρ1n |
|
K2 |
ρ 21 |
ρ22 |
… |
ρ2n |
|
… |
… |
… |
… |
… |
|
Km |
ρm1 |
ρm2 |
… |
ρmn |
где
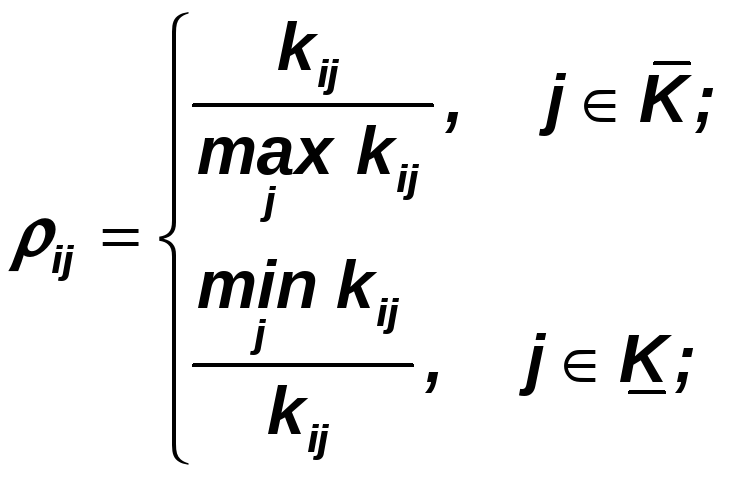
![]() -
множество индексов критериев,
ориентированных на достижение максимума,
-
множество индексов критериев,
ориентированных на достижение максимума,
![]() - множество индексов критериев,
ориентированных на достижение минимума.
- множество индексов критериев,
ориентированных на достижение минимума.
2. Безразмерные оценки ρij принимаются в качестве вероятностей достижения частных целей pij: pij=ρij.
3. Находятся вероятности Pj достижения конечной цели Z j-ой структурой Sj:
![]() .
.
Фактически Pj есть минимальное из чисел в j-ом столбце матрицы безразмерных оценок.
4. Отбираются варианты, для которых Pj≥p0.
3.2. Ранжирование структур с использованием функций полезности. Одной из проблем при оценке структур с помощью многих критериев является существенная разница в диапазоне значений различных критериев. Практически любой алгоритм анализа структур прямо или косвенно содержит механизм приведения различных диапазонов значений к какому-то одному эталонному. Очень часто этот эталонный диапазон представляет собой отрезок [0, 1]. Рассмотрим один из способов приведения произвольного диапазона значений к отрезку [0, 1], основанный на использовании функций ценности.
Допустим, что критерий K имеет диапазон значений [k1, k2], при этом k1 – (наи)худшее значение, k2 – (наи)лучшее. Тогда функцию полезности ρ(k) можно построить следующим образом:
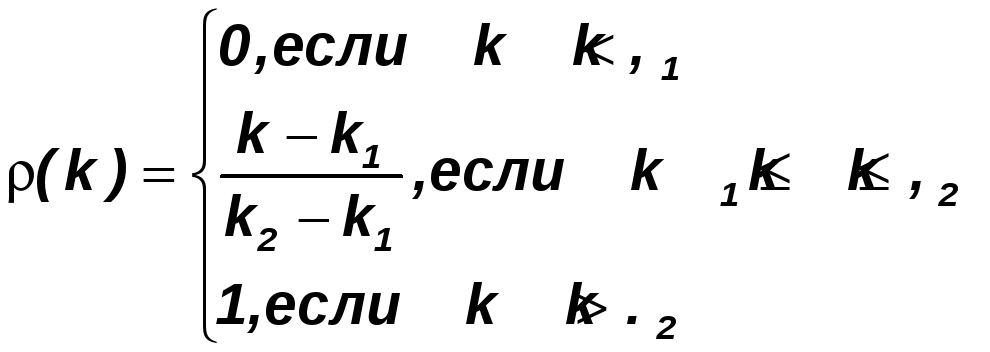 (1)
(1)
Ниже приведен график этой функции
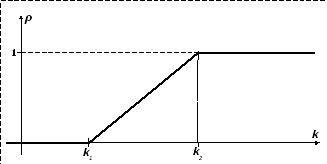
Рис.1. График функции полезности.
Худшему значению критерия соответствует нулевое значение функции полезности, лучшему – единичное значение.
Отметим, что диапазон значений [k1, k2] может не совпадать с множеством всех значений критерия K. Чаще всего реальный диапазон не известен, а интервал [k1, k2] получен от экспертов и описывает множество желательных значений критерия. Понимать это нужно таким образом: значения критерия на некоторых структурах могут лежать вне диапазона [k1, k2], т.е. быть лучше (больше) k2 или хуже (меньше) k1. Таким значениям критерия функция полезности (1) ставит в соответствие значения 1 и 0 соответственно. То, что значения, лучшие k2, получают значение 1, вполне приемлемо. А вот, то что значения, худшие k1 , получают, как и k1, значение 0 – не всегда. Значения, худшие k1, могут быть не только нежелательными, но и недопустимыми. Для того, чтобы подчеркнуть, что значения худшие худшего нежелательны, функции полезности «позволяют» принимать отрицательные значения. Формула (1) при этом принимает вид:
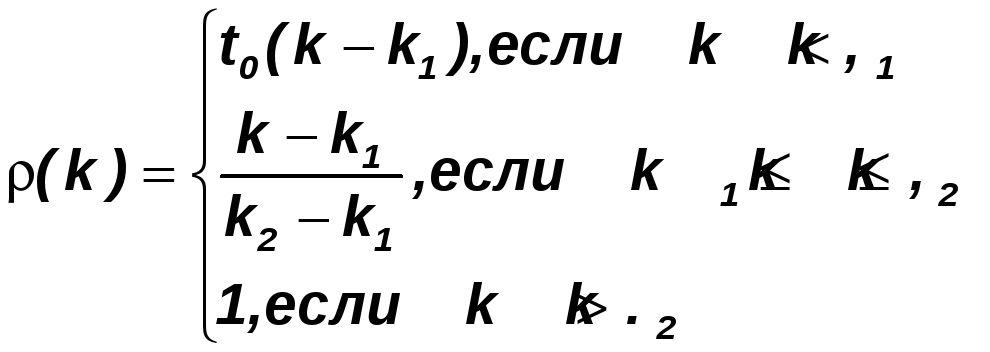 (2)
(2)
График функции (2) приведен на рис. 2. Коэффициент t0=tgφ «управляет» углом наклона φ и предназначен для учета степени нежелательности «плохих» значений критерия. Степень нежелательности высокая – коэффициент большой, степень нежелательности малая – коэффициент маленький.
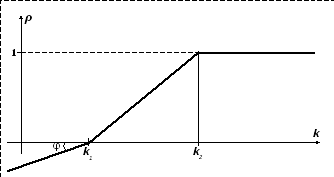
Рис.1. График функции полезности (2).
Алгоритм метода анализа структур с использованием функций полезности может быть таким.
1. Формируем множество конкурирующих структур {Sj}.
2. Определяем совокупность частных критериев {Ki}.
3. Проводим опрос экспертов относительно худших и лучших значений критериев:
|
{Ki} |
Единицы измерения |
Худшее значение |
Лучшее значение |
|
K1 |
Еи1 |
k11 |
k12 |
|
K2 |
Еи2 |
k21 |
k22 |
|
… |
|
|
|
|
Km |
Еиm |
km1 |
km2 |
4. Для частных критериев строим функции полезности (1), (2).
5. На основании опроса экспертов строим матрицу бинарных предпочтений критериев:
|
|
K1 |
K2 |
|
Km |
сj |
|
K1 |
|
c12 |
… |
c1m |
c1 |
|
K2 |
c21 |
|
… |
c2m |
c2 |
|
… |
… |
… |
… |
… |
… |
|
Km |
cm1 |
cm2 |
… |
|
cm |
где


6. Находим веса частных критериев, отражающие неформальные предпочтения экспертов:
 .
.
7. Для оценки частных показателей разрабатываем соответствующие модели.
8. Строим матрицу векторных оценок
|
|
S1 |
S2 |
|
Sn |
|
K1 |
k11 |
k12 |
… |
k1n |
|
K2 |
k21 |
k22 |
… |
k2n |
|
… |
… |
… |
… |
… |
|
Km |
km1 |
km2 |
… |
kmn |
9. Находим веса частных показателей, исходя из разброса векторных оценок:
 ,
,
где
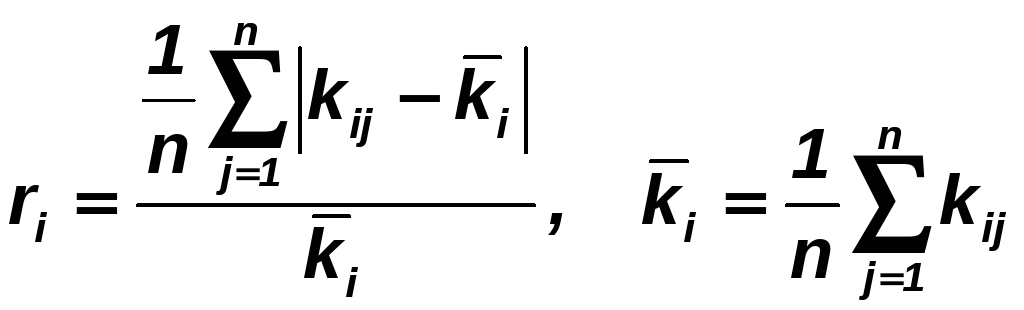 .
.
10. Находим усредненные веса, характеризующие важность частных критериев:
![]()
11. Производим оценку полезности конкурирующих структур
|
|
S1 |
S2 |
|
Sn |
W |
|
K1 |
ρ11 |
ρ12 |
… |
ρ1n |
W1 |
|
K2 |
ρ21 |
ρ22 |
… |
ρ2n |
W2 |
|
… |
… |
… |
… |
… |
… |
|
Km |
ρm1 |
ρm2 |
… |
ρmn |
Wm |
|
q |
q1 |
q2 |
… |
qn |
|
Здесь
![]() -
оценки полезности,
-
оценки полезности,
![]() - функция полезности, соответствующая
i-ому
критерию;
- функция полезности, соответствующая
i-ому
критерию;
 -
обобщенная оценка полезности структуры
Sj,
-
обобщенная оценка полезности структуры
Sj,
![]() .
.
12. Ранжируем структуры в соответствии с обобщенными оценками полезности.