

12.Приводы с последовательно-соединёнными групповыми передачами.
Приводом называеться совокупность передач связывающие вращение двух соседних валов.

Группы передач характеризуються 2 показателями:
1.Число передач
2.Передаточное отношение.
Структура с последовательным расположением кинематической цепи групп передач называеться множительной.

Общее число ступеней частот вращения = произведению чисел передач в каждой из групповой передач множительной структуры.

Из всех групппередач последовательно расположенных вдоль кинематической цепи одна должна быть основной.
Основной - называют первую в кинематической цепи образующую начальный ряд частот вращения. Остальные группы передач называютпереборными. Переборные группы служат для размножения ряда на весь требуемый диапазон частот вращения выходного вала.
Характеристика груповых передач

Значение характеристики групповой передачи численно равно числу передач кинематической предшествующих данной группе.
Формула структуры привода.
На стадии проектирования любая группа передач может быть выбрана в качестве основной. Порядок чередования групп вдоль кинематической цепи характеризует конструктивный вариант коробки.

Число конструктивных вариантов одной и той же структуры = числу перестановок m групп.
m – число групповых передач
q – число групп передач с одинаковым числом передач

Лучшим конструктивным вариантом является вариант, когда число передач в группах уменьшается от электродвигателя к шпинделю.
13.Графический изображение множительной структуры.
Данный метод основан на условном изображении валов и зубчатых передач.



Передаточное
отношение любой передачи в общем виде

Где S+ ускорение
И S- замедление
S – число интервалов, которые пересекают отрезок изображающий передачу
14.Графоаналитический метод кинематического расчёта.
Построение структурной сетки. Построение графика частот вращения.
Графоаналитический метод предусматривает:
Построение структурной сетки;
Построение графика частот вращения.
Цель построения графической части—получить численное значение передаточных отношений передач механизма,при которых обеспечиваются рациональные массогабаритные хар-ки.
1.Записываем структурную формулу привода

2. Опр.хар-ки групповый передач.
3.Изображаем основу структурной сетки.
Горизонтальные линии—z
Вертикальные линии –- на 1 больше числа групп передач
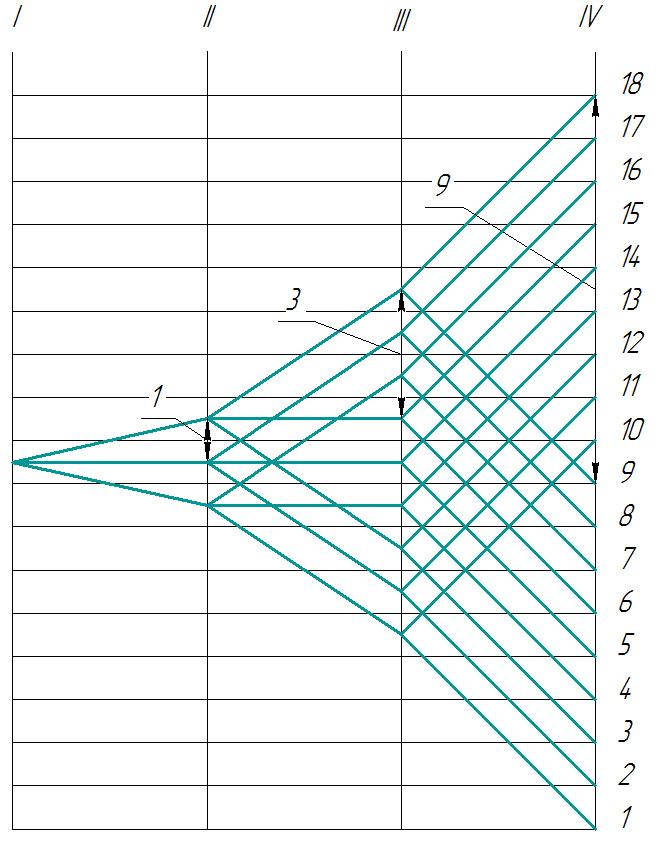
Построение графика частот вращения.
Последовательность построения графика частот:
проводим столько вертикальных линий, сколько валов имеет привод, включая вал электродвигателя;
проводим на равных расстояниях столько горизонтальных линий, сколько ступеней частот вращения охватывает диапазон регулирования;
строим нижнюю ветвь графика – т.н. линию наименьших передаточных отношений. При этом учитывают табл. ограничений на число пересекаемых интервалов отрезком изображающим передачу.
i\ φ
1,06
1,12
1,26
1,41
1,58
1,78
2,0
imin≥ 1/4
24
12
6
4
3
2
2
imax≤ 2
12
6
3
2
2
1
1
дальнейшие построения ведутся в соответствии со структурной сеткой для каждой группы. Расстояния между концами отрезков также равны характеристике.
по графику частот вращения определяем передаточное отношение по формуле:

где знак «+» берется в том случае, если передача направлена вверх, знак «-» если вниз;
S – число интервалов, которые пересекают отрезок изображающий передачу.





