

Лекция 3
.docЛЕКЦИЯ 3
3 КИНЕМАТИЧЕСКИЕ СТРУКТУРЫ НОВОГО ПОКОЛЕНИЯ
3.1 Выбор кинематической структуры
Выбор кинематической структуры является важнейшей задачей проектирования машин нового поколения, от этого во многом зависят главные технические характеристики системы, ее динамические и точностные параметры.
Программой движения называется одно или несколько уравнений , связывающих координаты движущегося объекта , координатный базис , в котором задается программа движений называется базисом программирования движений.
В общем случае выбор базиса определяется технологической постановкой задачи. Следует начать с анализа желаемых движений рабочего органа, который условно отсечен от других звеньев машины. Совокупность остальных звеньев необходима для исполнения заданного движения рабочего органа.
В большинстве случаев более предпочтительной является декартова система координат , Встречаются следующие разновидности декартова базиса программирования ( рисунок 12):
- базовая (мировая) система координат, единая для всей технологической системы (с индексом 0),
-система координат связанная с рабочим органом (с индексом 1), -система координат , связанная с обрабатываемой деталью ( с индексом 2),
-система координат связанная с информационно –измерительной системой ( с индексом 3).
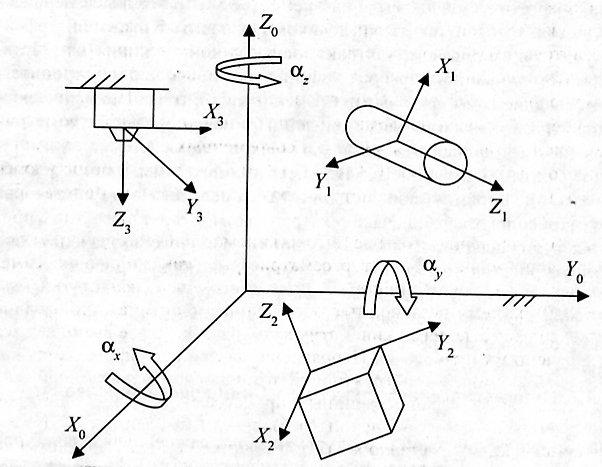
Рисунок 12 Декартовы базисы программирования движения.
Декартовый базис соответствует естественному восприятию картины мира человеческим сознанием, так как большинство объектов технологической среды имеет линейные формы. Декартов базис удобен для конструкторов и для операторов станков.
Преимущества декартова базиса удобен для проектирования стандартными средствами и не требует высокого образовательного уровня обслуживающего персонала и кроме того обладает линейными свойствами, что позволяет использовать относительно простые и , следовательно, дешевые системы управления станком.
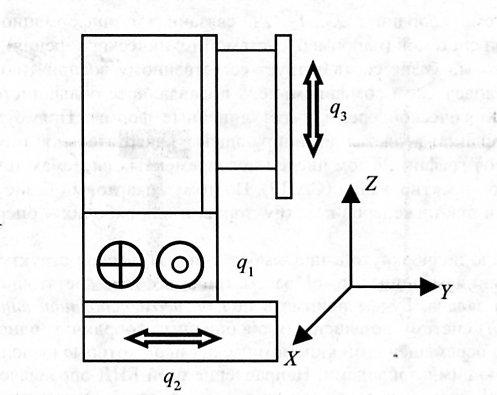
Рисунок 13 – Трехкоординатный станок с декартовым базисом исполнения движений.
Однако при выборе этого базиса возникает ряд проблем :
- сложно обеспечить высокую взаимную перпендикулярность направляющих, особенно в крупногабаритных станках,
-машины имеют большие габариты и массу, поскольку направляющие располагаются одна на другой,
- направляющие испытывают воздействие изгибающих моментов, которые вызывают дополнительные деформации, в результате ухудшается точность механической системы.
В нелинейных базисах движение привода одной кинематической пары ведет к перемещению рабочего органа сразу по нескольким декартовым осям, при этом связи между этими перемещениями описываются нелинейными функциями.
На рисунке 14 представлены наиболее распространенные кинематические схемы промышленных роботов
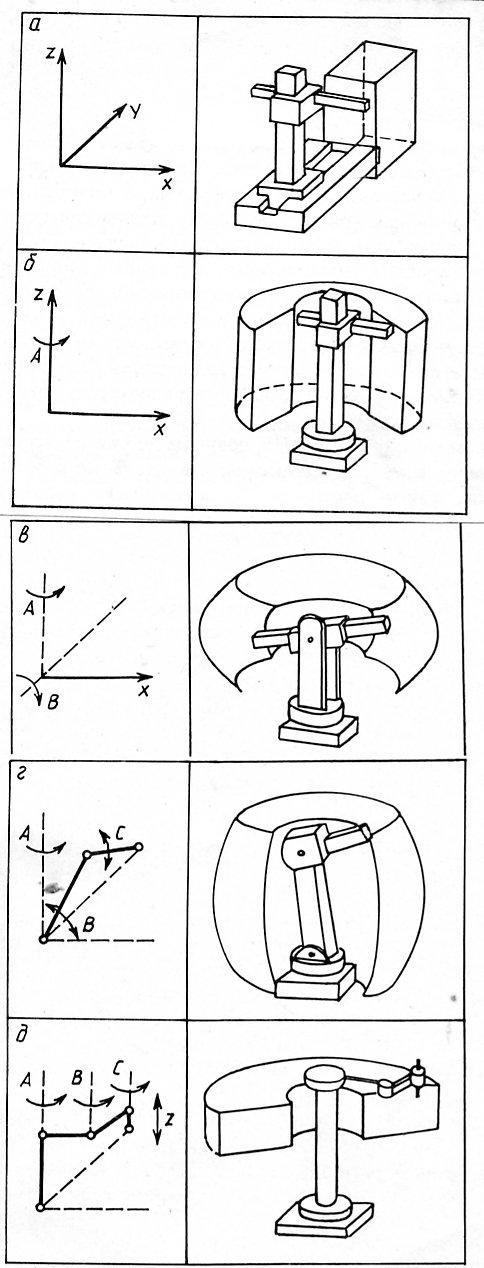
Рисунок 14- Схемы промышленных роботов: а- прямоугольная, б- цилиндрическая, в- сферическая, г- антропоморфная, д- комбинированная
3.2 Структура и геометрические характеристики манипуляторов
Рассмотрим вопрос о структуре манипуляторов более подробно.
Движения, совершаемые человеком и воспроизводимые роботом , можно разделить на три класса: глобальные, региональные, локальные.
Глобальные движения – это перемещения на расстояния, превышающие размеры робота. Робот , совершающий такие движения называется мобильным, а не совершающий их – стационарным. Глобальные движения совершает робот, перемещаясь по подвесному монорельсу, так ,например ,работают роботы, обслуживающие группу станков, установленных на одной линии. У большинства применяемых роботов глобальные движения отсутствуют.
Движения, совершаемые рукой робота в пределах его рабочей зоны и соизмеримые с его габаритами , называются региональными. Их также называют переносными, так как они обеспечивают перенос объекта в требуемую точку, эти движения соответствуют движениям, реализуемым плечом и предплечьем руки человека.
Локальные движения – это перемещения рабочего органа в малой зоне, они соответствуют движениям кисти человека. Основное назначение этих движений – ориентирование объекта манипулирования в данной точке рабочего пространства, поэтому их также называют ориентирующими.
С введением понятий регионального и локального движений кинематическую цепь стационарного манипулятора можно расчленить на две функциональные части, отвечающие за эти движения, - переносную и ориентирующую и соответственно выделить переносные и ориентриующие степени подвижности, обеспечивающие эти движения.
Как известно из механики , положение тела в пространстве определяется шестью обобщенными координатами. Произвольное движение твердого тела может быть разложено на поступательное перемещение, связанное с некоторой произвольно выбранной точкой, и вращение относительно этой точки. Соответственно из шести независимых обобщенных координат , описывающих движение твердого тела, три координаты задают перемещение некоторой фиксированной точки тела в пространстве, а три характеризуют его вращение. Пространственный манипулятор в общем случае должен иметь шесть степеней подвижности: три для отработки региональных движений и три для локальных.
В том случае, когда приходится манипулировать с несвободными предметами, на которые наложены дополнительные связи, может оказаться, что указанных степеней подвижности мало, так, например, для того чтобы наживить и навинтить гайку, поднять с пола ящик стола для того чтобы установить его в направляющие , достаточно иметь манипулятор с шестью степенями подвижности, однако без седьмого, винтового или прямолинейного нельзя навинтить гайку или задвинуть ящик в стол иначе, как используя сложную комбинацию движений.
Число степеней подвижности более шести может оказаться необходимым при выполнении сложных работ, связанных с дополнительными ограничениями на перемещение звеньев манипулятора при работе в стесненном пространстве. Увеличение числа степеней подвижности наделяет манипулятор ценным свойством избыточности, однако это усложняет его и повышает стоимость. Для промышленных роботов, работающих в организованном рабочем пространстве, где рабочие зоны упорядочены и , как правило, лежат в горизонтальных и вертикальных плоскостях, при выполнении рабочих операций оказывается достаточным 4-5 степеней свободы ( 3 переносных и 1-2 ориентирующих).
Кинематическая цепь региональных движений обычно осуществляется с использованием кинематических пар 5-го класса (вращательных и поступательных) и содержит три звена. В таком случае возможны следующие последовательности расположения кинематических пар: ВВВ, ВВП,ВПВ, ПВВ, ППВ.ПВП,ВПП.ППП, что уже порождает разнообразие кинематических схем.
Оси соседних кинематических пар могут иметь самое различное относительное расположение, однако получили распространение манипуляторы с коллинеарными (параллельными) или ортогональными осями. Такие манипуляторы называют ортогональными. Разнообразие возможных структурных схем представлено на рисунке 15.
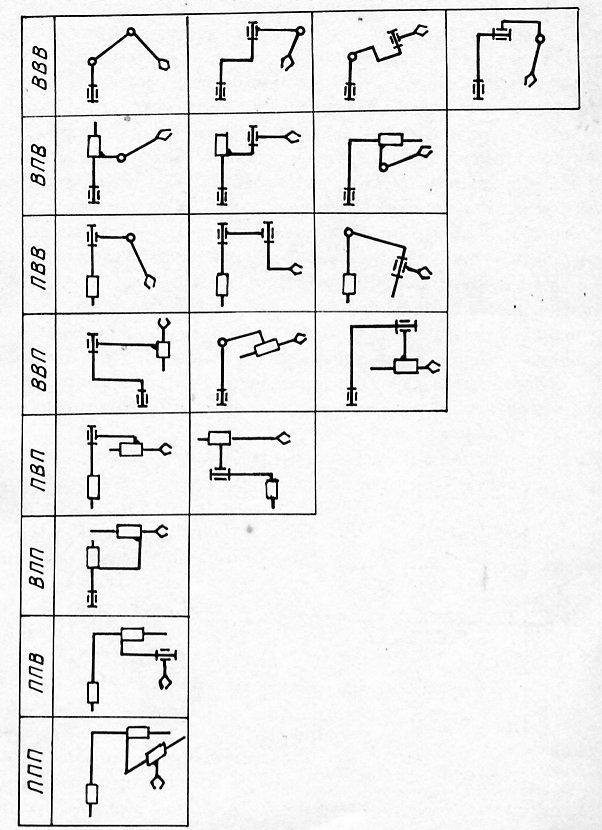
Рисунок 15- Структурные схемы ортогональных манипуляторов
Из приведенных на рисунке 15 схем наибольшее распространение получили схемы ВВВ1, ВВП2, ВПП, ППП.
Наиболее простой является схема ППП - о ней уже говорилось выше.
Такая схема наиболее удобна для выполнения прямолинейных движений. Форма ее рабочей зоны – параллелепипед. При этом максимально упрощено программирование робота, так как нет необходимости пересчета декартовых координат в обобщенные. Эта система применяется в станках с ЧПУ, и в сборочных роботах. Недостатки этой системы – увеличение габаритов устройства и сложность изготовления точных направляющих.
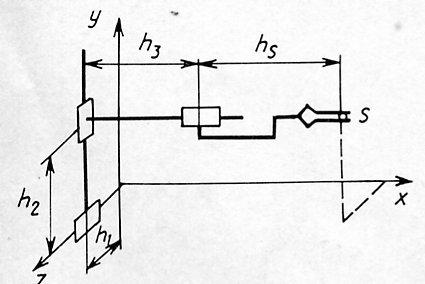
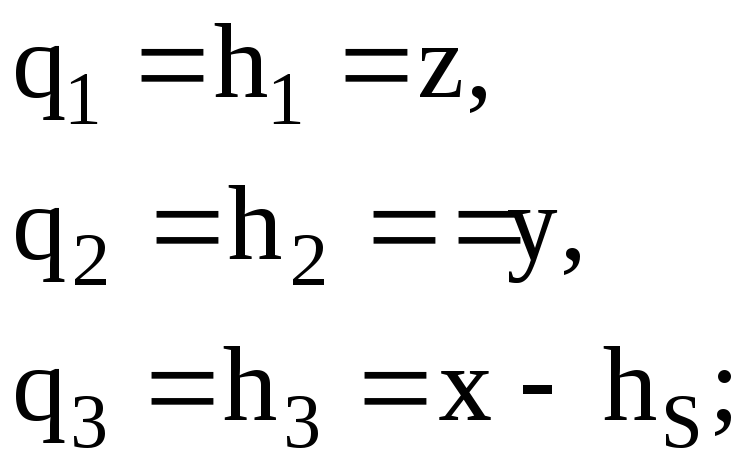
Рисунок 16 – Манипулятор с прямоугольной системой координат
Для манипулятора с прямоугольной системой связь между декартовыми координатами исполнительной точки и обобщенными координатами имеет простейший вид
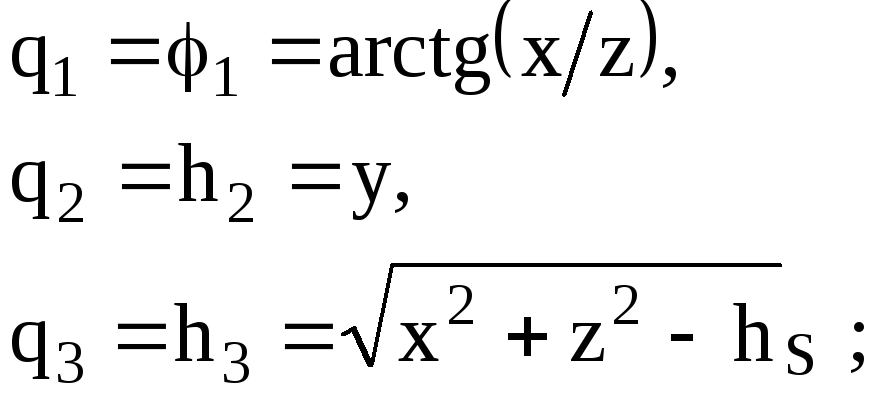
В настоящее время наибольшее распространение получили роботы со схемой ВПП – роботы с цилиндрической системой координат (рисунок 17). Их рабочее пространство имеет форму цилиндра или его части. Рука может осуществлять движение по горизонтали и вертикали и поворот вокруг колонны, робот с таким исполнением компактен при большом обслуживаемом объеме , относительно прост при программировании. Его недостатком является наличие мертвого необслуживаемого пространства к основания. Такую схему имеют обычно транспортные роботы.

Рисунок 17 – Манипулятор с цилиндрической системой координат
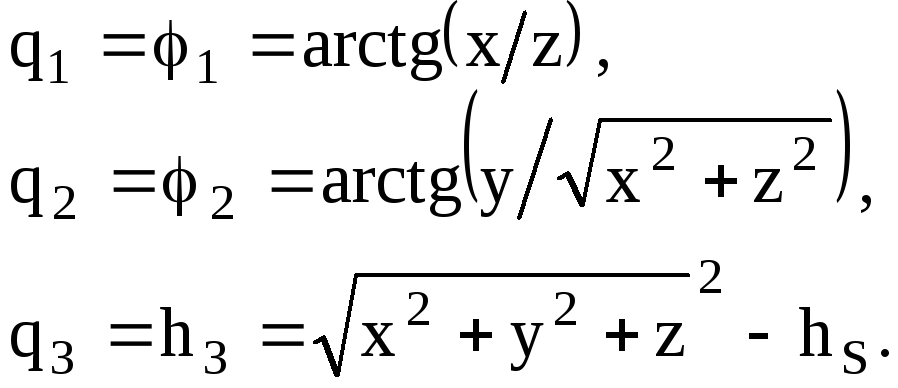
Формулы , связывающие декартовы координаты исполнительной точки с обобщенными (управляемыми ) координатами для манипулятора этого типа , имеют следующий вид
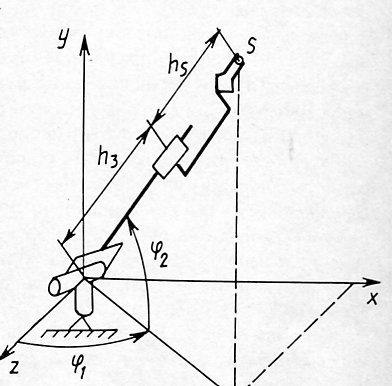
Робот со схемой ВВП2 имеет сферическую систему координат, его рабочее пространство – сферический сегмент (рисунок 18). Такие роботы сложнее , но компактнее, обслуживают больший объем, включая зоны, выходящие за габариты робота. Роботы этого типа имеют повышенную жесткость , что позволяет их использовать при больших нагрузках.
![]()
Рисунок 18- Манипулятор со сферической системой координат
Соответствующие формулы связи декартовых координат и обобщенных координат имеют следующий вид
Робот исполнения ВВВ1 со сложной системой координат называется ангулярным (угловым), шарнирным или антропоморфным (человекоподобным).
Основное достоинство такого манипулятора – значительно меньшие габариты, чем у приведенных выше схем, при большой зоне обслуживания , он может применяться в стесненном пространстве,. Такие манипуляторы обычно хорошо уравновешены и поэтому их программирование может осуществляться методом обучения рукой человека . Их широко применяют в автомобильной промышленности на операциях сборки, сварки, окраски.
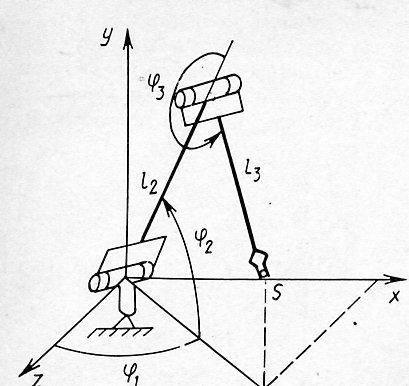
Рисунок 19- Манипулятор с антропоморфной системой координат
Схему манипулятора с антропоморфной системой координат обычно принято называть «шарнирным манипулятором» по понятной причине – здесь использованы только вращательные пары, «шарниры», и все модули движения здесь вращательные.
3.3 Эта схема положена в основу предложенного автором графического символа робототехники, представленного на рисунке 20. Насколько известно автору такого общего символа пока еще нет.
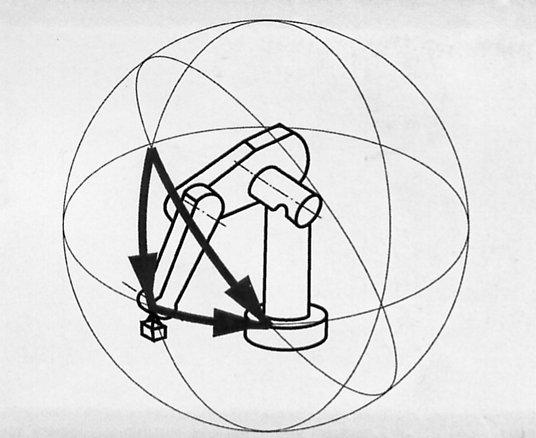
Рисунок 20- Предлагаемый графический символ робототехники
3.4 Соответствующие формулы для пересчета декартовых координат в обобщенные координаты выглядят достаточно сложно и поэтому здесь не приводятся. Их можно найти в специальной литературе, например в книге « Механика роботов и манипуляторов с электроприводом» авт. Борисенко,Л.А и Самойленко А.В. Мн. «Вышейшая школа» 1992 г.
С помощью приведенных выше формул решается задача определения законов движения по управляемым координатам, при котором исполнительная точка манипулятора попадает в требуемые точки декартова пространства. Эта задача носит название обратной задачи по положениям манипулятора. Однако движение определяется не только достигаемыми точками , но и скоростью движения исполнительной точки по траектории, Для многомерной системы , к которой относится манипулятор , движение приводов должно быть согласовано не только по координатам , но и по времени, В противном случае траектория движения может быть далекой от требуемой. Таким образом задача управления манипулятором является не только геометрической, но и кинематической с учетом параметров скорости.
В задачах автоматизированного машиностроения, как правило , задается достаточно простой профиль скорости рабочего органа. Например, на операциях лазерной резки или окраски требуется постоянная контурная скорость. Однако для его реализации в мехатронных системах с нелинейным базисам, к которому относятся все рассмотренные выше схемы , кроме первой, потребуется движение во времени исполнительных приводов по сложным законам.
Рассмотрим эту проблему на примере двухзвенного манипулятора типа «SKARA» , который можно рассматривать как упрощенный вариант приведенного выше шарнирного манипулятора. Пусть здесь рабочий орган должен перемещаться в плоскости XY по прямолинейной траектории с постоянной скоростью (рисунок 21).
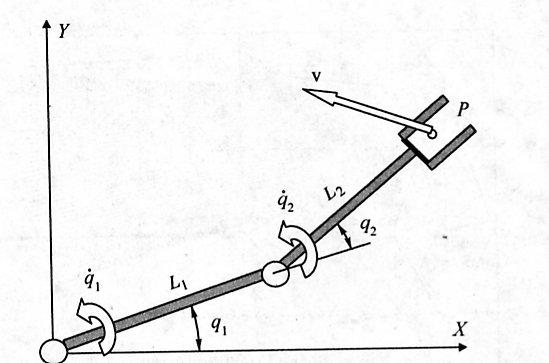
Рисунок 20- Постановка обратной задачи о скорости для манипулятора типа «SKARA»
Определим скорости вращения шарниров
манипулятора
![]()
![]() ,
,
![]() для
заданного вектора скорости рабочего
органа v. Такая постановка
задачи управляемого движения в
робототехнике называется обратной
задачей о скорости.
для
заданного вектора скорости рабочего
органа v. Такая постановка
задачи управляемого движения в
робототехнике называется обратной
задачей о скорости.
Опуская вывод зависимостей для решения этой задачи, что само по себе требует значительных усилий, приведем итоговые формулы
![]()
![]()
![]() ,
,
![]() ,
,![]()
где
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
При моделировании исследовалось движение
манипулятора параллельно оси X
с постоянной скоростью. Движение
начиналось из заданной начальной
конфигурации (![]() ),
скорости v= 0,3 м/с.
),
скорости v= 0,3 м/с.
На рисунке 21 представлены законы
изменения обобщенных координат
![]() и
и
![]() ,
а также графики соответствующих
обобщенных скоростей.
,
а также графики соответствующих
обобщенных скоростей.
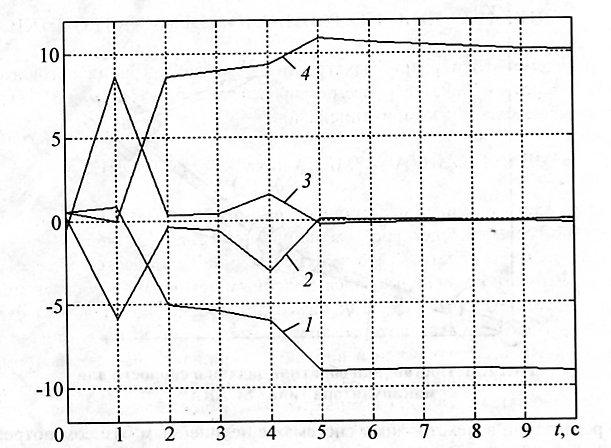
Рисунок 21 Законы движения звеньев манипулятора:
1,4 – углы поворотов соответственно первого и второго звена,
2,3 – скорость движения соответственно первого и второго звена
Таким образом, чтобы обеспечить равномерное движение рабочего органа , исполнительные приводы робота должны отработать сложные временные программы. Причем в течение рассмотренного интервала времени оба привода неоднократно совершают скоростные рывки, включающие участки быстрого разгона и торможения.
Представленные выше схемы имеют целый ряд существенных недостатков
-низкий показатель грузоподъемность –масса манипулятора, что обусловлено последовательной схемой соединения звеньев. Каждый последующий привод вынужден перемещать не только полезную нагрузку, но и все последующие по цепи звенья.
- погрешности в перемещениях всех шарниров суммируются на концевой точке манипулятора , что приводит к низкой точности позиционирования манипулятора по сравнению с декартовой компоновкой,
- относительно низкая жесткость манипуляционных роботов , так как упругое отклонение рабочего органа есть результат накопления деформаций по цепи по всем степеням подвижности робота. Причем весовые коэффициенты этой суммы пропорциональны расстояниям от концевой точки до осей соответствующих шарниров.
Одним из эффективных путей преодоления перечисленных недостатков – это создание машин с параллельной кинематикой (МПК). В основе их конструкции лежит обычно платформа Стюарта. Машина имеет основание и подвижную платформу, соединенные несколькими стержнями управляемой длины (рисунок 21.1)
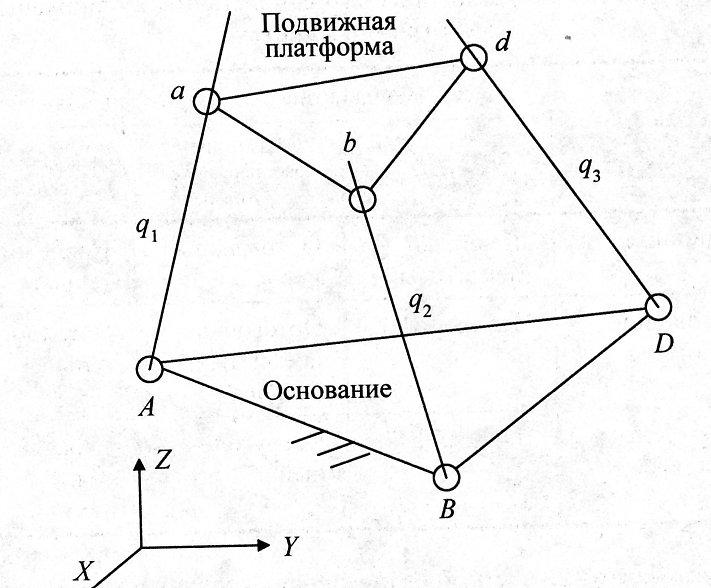
Рисунок 21.1 Платформа Стюарта
Стержни закреплены на концах шарнирами , у которых не менее двух степеней подвижности. На подвижной платформе крепиться рабочий орган (например, инструментальная или измерительная головка). Изменяя длины стержней с помощью приводов линейных перемещений можно управлять перемещениями и ориентацией подвижной платформы, а следовательно, и жестко связанного с ней рабочего органа.
Для универсальных машин, где требуется управление пространственным перемещением рабочего органа по шести степеням свободы, необходимо соответственно шесть стержней. В мировой литературе такие машины называются «гексоподами». Если управляемых стержней три , то МПК называется трипод.
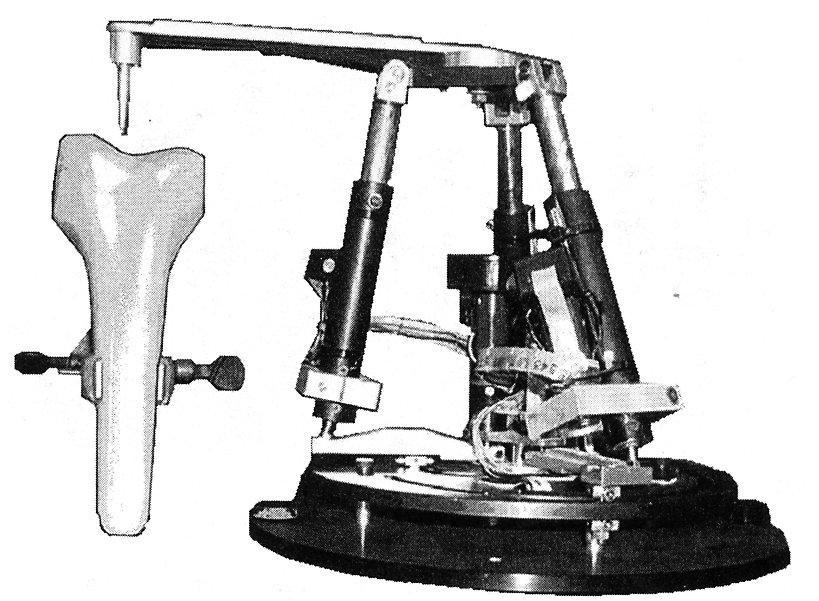
Рисунок 21.2. Трипод, сканирующий поверхность кости
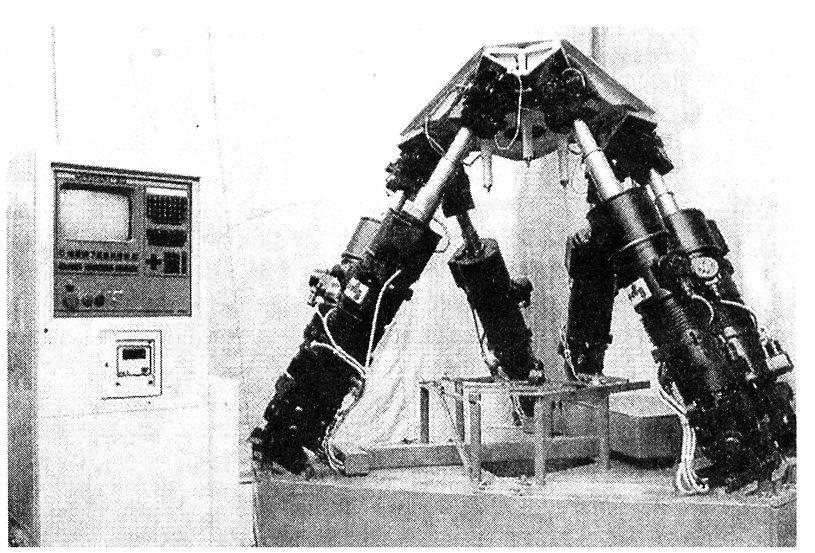
Рисунок 21.3 Гексапод
Основными преимуществами машин с параллельной кинематикой являются
-высокая точность движений.
-высокие скорости и ускорения.
-отсутствие традиционных направляющих и станин
Повышенные точности МПК обусловлены следующими факторами
- здесь не происходит суперпозиции погрешностей позиционирования звеньев при переходе от базы к рабочему органу.
- стержневые механизмы обладают высокой жесткостью, так как при наличии двухстепенных шарниров крепления стержни не подвергаются изгибающим моментам и работают только на растяжение –сжатие.
Благодаря повышенной точности МПК могут применяться не только как обрабатывающие машины, но и в качестве измерительных машин.
Высокая жесткость МПК позволяет применять их на силовых технологических операциях, например в качестве гибочных машин
Особенность математического обеспечения , программирования и управления этим классом машин обусловлены тем, что их базис исполнения движений является косоугольным . За обобщенные координаты принимаются длины управляемых стержней. МПК – это наиболее сложный вариант мехатронной системы.
Тем не менее обратная задача кинематики для трипода решается просто. Можно показать , что длины стержней можно найти как расстояния между соответствующими точками , координаты которых заданы в декартовом базисе.
В мехатронных системах нового покления для осуществления больших перемещений возможна комбинация последовательной и параллельной структур кинематических цепей. Примером такой гибридной кинематики является технологический комплекс, представленный на рисунке 21.4.
Рисунок 21.4 Технологический комплекс