

03 анализ рабочих процессов режущих аппаратов
.pdfКИНЕМАТИКА НОЖА СЕГМЕНТНО-ПАЛЬЦЕВОГО РЕЖУЩЕГО АППАРАТА

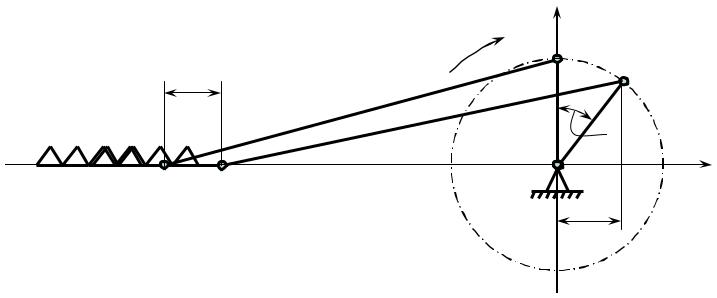
Кинематические характеристики движения ножа – это зависимость перемещения x, скорости V и ускорения j
ножа от угла поворота кривошипа.
|
w |
B0 |
Y |
|
|
x |
|
B1 |
|
|
|
|
|
|
|
|
r |
wt |
|
|
|
O |
X |
|
|
|
|
||
A0 |
A1 |
|
x |
|
|
|
|
|
Перемещение
x = r sin wt,
где w – угловая скорость; r – радиус кривошипа.
После дифференцирования получим уравнения скорости и
ускорения
V = rwcos wt,
j = -rw2 sin wt.
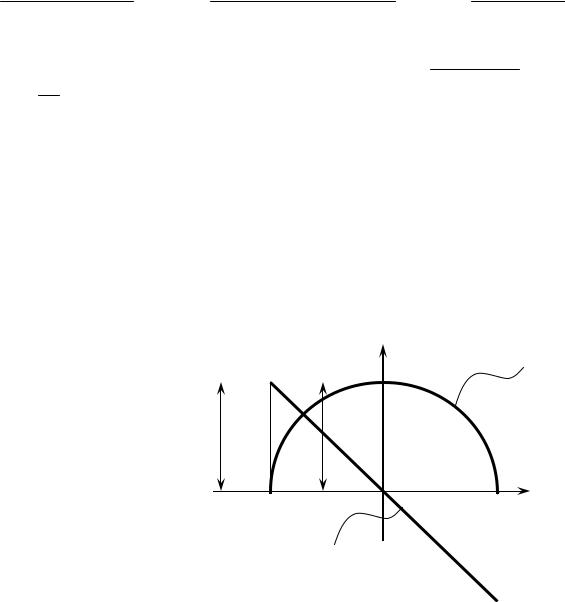
Определим зависимость скорости ножа V от перемещения x:
V = rwcos wt = rw
 1-sin 2 wt = w
1-sin 2 wt = w
 r 2 - r 2 sin 2 wt = w
r 2 - r 2 sin 2 wt = w
 r 2 - x 2 .
r 2 - x 2 .
Обозначив отношение Vw через y ,будем иметь y = 
 r 2 - x 2 .
r 2 - x 2 .
Перемещение x и скорость ножа V связаны между собой
уравнением окружности радиусом r через ординату y,
умножив которую на w получим скорость, соответствующую заданному перемещению, т.е. V = wy.
Зависимость ускорения от |
|
|
|
V |
|
||
|
|
|
|
y = |
|
V = f(x) |
|
перемещения будет иметь вид |
w |
||||||
|
|
|
|
|
|||
j = -rw2 sin wt = -w2 x. |
w2r |
wr |
|||
Максимальные значения скорости |
|
x |
|||
|
|
||||
и ускорения равны соответственно |
j = f(x) |
|
|||
V |
max |
= wr и j = w2r |
|
|
|
|
max |
|
|
|
|
СКОРОСТИ РЕЗАНИЯ

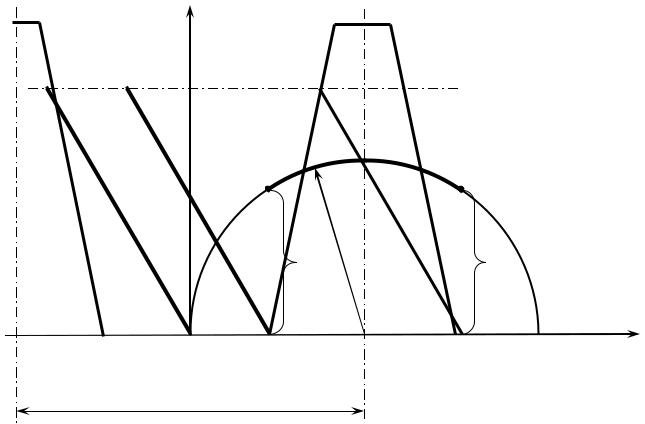
При радиусе кривошипа r зависимость скорости ножа от перемещения может быть представлена полуокружностью
радиусом r.
Начнется резание |
A0 |
|
A |
Y |
|
|
|
AК |
|
|
|
|
|
в момент |
|
Н |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
соприкосновения |
|
|
|
|
|
|
|
|
|
|
|
|
|
лезвий сегмента и |
|
|
|
|
|
КН |
|
|
|
|
|
|
КК |
пальца. |
|
|
|
|
|
|
|
|
r |
|
|
||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закончится резание |
|
|
|
|
|
|
|
|
yН |
|
|
yК |
|
при полном |
|
|
|
|
|
|
|
|
|
|
|
|
X |
прохождении лезвия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сегмента над лезвием |
|
|
|
B0 |
BН |
BК |
|||||||
пальца. |
|
|
S = t = t0 = 2r |
|
|
|
|||||||
Скорость начала резания VН = wyН. |
Дуга КНКК определяет |
||||||||||||
Скорость конца резания VК = wyК. |
значения |
. |
|||||||||||
|
|
|
|
|
скоростей резания |
||||||||
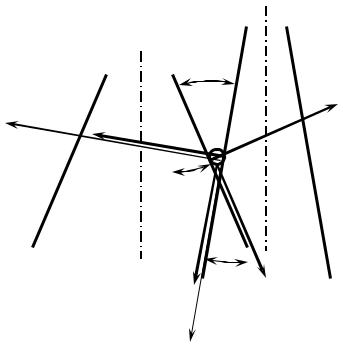
УСЛОВИЕ ЗАЩЕМЛЕНИЯ СТЕБЛЕЙ РЕЖУЩЕЙ ПАРОЙ

|
, подведенный лезвием сегмента к противорежущей |
||||||||||
На стебель |
|
|
|
|
|
|
|
|
|
|
|
пластине, |
|
: |
|
|
|
|
|
|
|
|
|
|
действуют силы |
|
|
a + b = g |
|
|
|||||
со стороны сегмента N1, F1; |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
со стороны пальца N2, F2. |
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
Для защемления стебля |
|
Y |
N2 |
|
|
|
|
|
N1 |
||
должно соблюдаться условие |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
F2 + F1 cos g ³ N1 sin g. |
= N2 tgj2 , |
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
||||||
Учитывая, что F1 = N1tgj1 , F2 |
|
|
F2 |
|
|
F1 |
|||||
имеем: N2 tgj2 + N1tgj1 cos g ³ N1 sin g. |
|
|
|
b |
|
|
|||||
|
X |
|
|
|
|
||||||
|
|
|
|
||||||||
Из условия равенства нулю суммы |
= N1 cos g + F1 sin g |
|
|
||||||||
проекций всех сил на ось Y: |
N2 |
|
|
||||||||
или N2 = N1 cos g + N1tgj1 sin g.