

03 анализ рабочих процессов режущих аппаратов
.pdfПосле подстановки N2 в предыдущее неравенство и сокращения всех членов на N1 получим:
cosg tgj2 |
+ sin g tgj1tgj2 + tgj1 cos g ³ sin g. |
|||||
После преобразований имеем |
|
|||||
tgg £ |
tgj1 + tgj2 |
|
или |
tgg £ tg(j1 + j2 ). |
||
1- tgj1tgj2 |
||||||
|
|
|
||||
Отсюда |
|
g £ j1 + j2 . |
|
|
||
При срезании трав сумма углов
(j1 + j2) = 25…35° при влажности 14…22 % и (j1 + j2) = 40…60° при влажности 55…70 %.
При уборке хлебных злаков – (j1 + j2) = 20…35°.
Насечка лезвий сегментов увеличивает углы трения на 30…50 %.
РАБОЧИЙ ПРОЦЕСС РОТОРНО-ДИСКОВОГО РЕЖУЩЕГО АППАРАТА


Ножи дискового ротационного аппарата совершают сложное движение:
Øвращательное вместе с дисками с угловой скоростью w;
Øпоступательное со скоростью V движения машины.
Точки ножа движутся по циклоидам, уравнения которых для А и В
|
|
Y |
|
|
|
xA =Vt + r0 sin j ; y A = r0 cos j; |
||
V |
B0 |
|
D |
|
xB |
=Vt + r1 sin j ; yB = r1 cos j. |
||
|
B |
|
||||||
w |
A0 |
1 |
A |
|
|
|
|
|
|
С |
|
|
|
|
|||
|
|
|
|
|
|
|||
j=wt |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
O0 |
О |
|
|
|
С1 |
D1 |
|
r0 |
Vt |
|
|
|
A1 |
B1 |
X |
r0 – радиус диска; |
|
|
|
|
|
|
|||
|
|
A |
|
С2 |
|
|
||
r1 |
|
|
|
|
|
r1 – радиус ротора; |
||
|
C0 |
B2 |
2 |
D2 |
|
|
||
lн |
2 |
|
|
|
lн – длина ножа. |
|||
D0 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
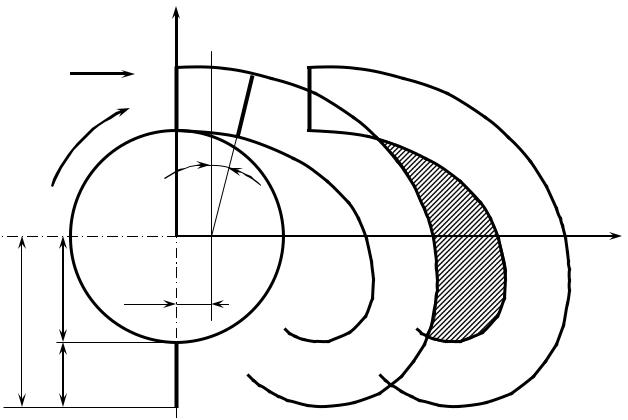
Нож 1 срезает растения между траекториями АА1А2 и ВВ1В2.
Нож 2 срезает растения между траекториями СС1С2 и DD1D2.
При О0С1 > О0B1 растения на заштрихованной площадке не будут срезаны.
Для качественного среза (без пропусков) должно выполняться неравенство О0С1 < О0B1 или xC1 < xB1
V |
B0 |
Y |
|
D |
|
xС1 – координата x для точки С1; |
||
|
B |
|
||||||
w |
A0 |
1 |
A |
|
|
xB1 – координата x |
для точки В1. |
|
|
С |
|
|
|
|
|||
|
|
|
|
|
|
|||
j=wt |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
O0 |
О |
|
|
|
С1 |
D1 |
|
r0 |
Vt |
|
|
|
A1 |
B1 |
X |
|
|
|
A |
|
С2 |
|
|
||
r1 |
|
|
|
|
|
|
||
|
C0 |
|
2 |
D2 |
|
|
|
|
lн |
2 |
B2 |
|
|
|
|
||
D0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|

xA =Vt + r0 sin j ; |
y A = r0 cos j; |
|
|
xB |
=Vt + r1 sin j ; yB = r1 cos j. |
|||||||||||||||||||||||||
Для точки B : |
j |
|
= |
|
p |
; |
|
t |
|
= |
|
|
p |
; |
x |
|
|
=V |
p |
+ r sin w |
p |
. |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
1 |
|
|
B1 |
2 |
|
|
|
B1 |
|
|
|
w |
|
В1 |
|
2w |
1 |
|
|
2w |
||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Для точки C |
: |
j |
= |
3p |
; |
t |
|
= |
3p |
; |
x |
|
=V |
3p |
+ r |
|
sin w |
3p |
. |
|||||||||||
|
|
С |
|
|
|
С |
|
|
0 |
|
|
|||||||||||||||||||
1 |
|
|
С |
2 |
|
|
|
|
2w |
|
|
|
|
2w |
|
|
|
2w |
||||||||||||
|
|
|
1 |
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
После подстановки значений x в неравенство и преобразований
l = wr0 > 2pr0 ,
V zн lн
где l – отношение окружной и поступательной скоростей или показатель кинематического режима;
zн – число ножей.
Для ротационно-дисковых косилок с двумя ножами, работающих на скоростях до 15 км/ч, l равен примерно 20.