

fizika / lab2
.docЛабораторна робота № 2
ВИЗНАЧЕННЯ МОМЕНТУ ІНЕРЦІЇ СИСТЕМИ
НА ПРИКЛАДІ МАЯТНИКА ОБЕРБЕКА
Мета роботи: експериментально визначити момент інерції системи динамічним методом та порівняти отримані результати з теоретичними обчисленнями.
Прилади та обладнання: маятник Обербека, міліметрова лінійка, секундомір.
Теоретичні відомості
Обертальним рухом твердого тіла (системи) відносно нерухомої осі називається такий рух, під час якого всі точки тіла (системи) рухаються в площинах, перпендикулярних до осі обертання, і описують кола з центрами на цій осі.
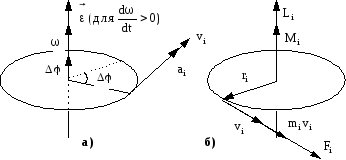
Рисунок 1
Кінематика
та динаміка обертального руху
характеризується відповідно кутом
повороту
![]() ,
приростом кута повороту
,
приростом кута повороту
![]() ,
кутовою швидкістю
,
кутовою швидкістю
![]() ,
кутовим прискоренням
,
кутовим прискоренням
![]() ,
моментом інерції J, моментом сили
,
моментом інерції J, моментом сили
![]() ,
моментом імпульсу
,
моментом імпульсу
![]() ,
які виконують таку саму роль для
обертального руху, як і відповідні
величини – шлях S, переміщення
,
які виконують таку саму роль для
обертального руху, як і відповідні
величини – шлях S, переміщення
![]() ,
швидкість
,
швидкість
![]() ,
прискорення
,
прискорення
![]() ,
маса m,
сила
,
маса m,
сила
![]() ,
імпульс
,
імпульс
![]() - для поступального руху. Зв’язок між
лінійними і відповідними кутовими
кінематичними величинами здійснюється
через радіус обертання
r
(радіус-вектор
- для поступального руху. Зв’язок між
лінійними і відповідними кутовими
кінематичними величинами здійснюється
через радіус обертання
r
(радіус-вектор
![]() )
таким чином:
)
таким чином:
s = r
; ![]() ;
;
![]() ;
;
![]() .
.
Динамічні характеристики обертального руху визначаються наступними виразами:
![]()
![]() ;
; ![]() ;
;
![]() .
.
Взаємозв’язок між відповідними величинами додатково розкривається при графічному зображенні векторних величин, що розглядаються в лабораторній роботі (див. рис. 1: а – кінематика, б – динаміка).
Основний закон динаміки обертального руху тіла відносно нерухомої осі обертання записується так:
![]() (1)
(1)
Для тіл правильної геометричної форми момент інерції простіше визначити аналітично, для тіл неправильної геометричної форми – експериментально. З експериментальних найбільш поширеними є методи, які грунтуються на використанні основного закону динаміки обертального руху, закону збереження та перетворення енергії та законів коливального руху.
Опис методу
Рисунок 2

Маятник
Обербека, момент інерції якого треба
визначити, складається із закріпленого
на горизонтальній осі шківа (рис. 2) з
радіально розташованими стержнями, на
яких симетрично закріплені чотири
тягарці масами m1.
На шків намотана нитка, один кінець якої
закріплений до шківа, а на другому кінці
підвішений тягарець масою m. Під час
опускання тягарця m маятник Обербека
під дією сили натягу нитки
![]() приводиться в рівноприскорений
обертальний рух.
приводиться в рівноприскорений
обертальний рух.
Основне рівняння динаміки обертального руху для маятника Обербека має вигляд
![]() ,
(2)
,
(2)
де r – радіус шківа. Моментом сили тертя нехтуємо.
Напрямок
вектора моменту
![]() вздовж осі обертання маятника визначається
векторним добутком (за правилом
свердлика):
вздовж осі обертання маятника визначається
векторним добутком (за правилом
свердлика):
![]()
Прирівнявши праві частини рівнянь (1) та (2), отримаємо
![]() ;
;
звідки
![]() .
(3)
.
(3)
Робочу формулу для розрахунку моменту інерції J знайдемо, використавши величини h і t, які вимірюються в процесі експерименту, де h – шлях руху важка m по вертикалі, t – час його руху.
Виразивши кутове прискорення через лінійне прискорення точок a, які знаходяться на ободі шківа, зведемо задачу до знаходження лише a. Оскільки тягарець m рухається прямолінійно і рівноприскорено, то його шлях h, пройдений за час t, можна визначити за формулою
![]() ,
звідки
,
звідки ![]() .
.
Тоді
кутове прискорення маятника ![]() .
.
Підставивши значення a та у рівняння (1-3), отримаємо
![]() (4)
(4)
Якщо
врахувати можливі числові значення
величин в нашому експерименті (h
1 м, t
10 c
gt2/2h
500), то в формулі (4) можна знехтувати
одиницею і отримати спрощений вираз
![]() (5)
(5)
Формула (5) є робочою для експериментального визначення моменту інерції маятника Обербека. В роботі виконуються прямі вимірювання величин h і t, значення величин m, m1 та r наведені в паспорті установки.
Порядок виконання роботи
-
Перевірити роботу маятника Обербека, зробивши декілька пробних пусків установки. Звернути увагу на вільність обертання шківа та опускання тягарця масою m, а також на збалансованість маятника. При необхідності відрегулювати установку (можливо з допомогою лаборанта).
-
Вибрати певну довжину шляху h руху тягарця m, яка буде однаковою для всіх вимірів.
-
Намотати нитку на шків так, щоб нижня частина тягарця знаходилась на рівні початку відліку шляху (висоти) руху тягарця. Відпустити тягарець m і одночасно ввімкнути секундомір. Зробити 5 вимірів. Записати в таблицю 1 значення h і t .
-
Зняти всі чотири тягарці m1 і повторити експеримент для того ж самого шляху h. Оскільки в цьому випадку ми не будемо розраховувати похибки, то результати вимірювання часу t' можна записати під таблицею.
Обчислення середніх значень
1. Обчислити середнє значення часу t та t', моменту інерції маятника з тягарцями J і маятника без тягарців J' за робочою формулою (5).
Для моделі абсолютно твердого тіла, яка використовується для розгляду обертального руху тіла, при обчисленні моментів інерції використовується адитивність (незалежне складання) моментів інерції всіх матеріальних точок тіла або, таким чином, будь-яких його частин. Тому момент інерції маятника Обербека J дорівнює сумі моментів інерції маятника без тягарців J' і моментів інерції самих тягарців J0е: J = J' + J0е, звідки експериментальне значення величини моменту інерції чотирьох тягарців J0е = J - J'. З іншого боку, якщо розглядати тягарці як матеріальні точки, то теоретичне значення їх моменту інерції J0т = 4m1R2 , де R – відстань від осі обертання до центра тяжіння тягарців масами m1.
2. Обчислити теоретичне значення моменту інерції тягарців J0т та порівняти його з експериментальним.
Таблиця 1.
Результати вимірювань та вихідні дані для розрахунків
-
Номер виміру
t
t
(t)2
1
.......
.......
.......
2
.......
.......
.......
3
.......
.......
.......
4
.......
.......
.......
5
.......
.......
.......
<t> = .......
—
 =
......
=
......
Прийнята довірча імовірність = 0,95 ;
h = ..... ; m = ..... ..... ; m1 = ..... ..... ; r = ..... ..... ; R = ..... ;
коефіцієнт Стьюдента t, = ..... , коефіцієнт Стьюдента t,5 = .....
t'1=.....; t'2=.....; t'3=.....; t'4=.....; t'5=..... <t'> = .......
Обчислення похибок прямих вимірювань
-
Використовуючи дані з додатку 1, заповнити таблицю2.
-
Обчислити випадкові відхилення від середнього значення <t> , їх квадрати і суму квадратів. Результати внести в табл. 1.
-
Обчислити границі довірчих похибок вимірювання h і t, а також відносні похибки. За приклад розрахунку похибок вимірювань взяти розрахунки з лабораторної роботи № 1.
-
Результати вимірювання h і t записати в стандартній формі (див. додаток 3).
Обчислення похибок непрямого вимірювання
Використовуючи формулу для обчислення відносної похибки непрямого вимірювання моменту інерції J маятника, обчислити границю відносної та абсолютної довірчої похибки.
Таблиця 2.
Вихідні дані для обчислення інструментальних та похибок відліку прямих вимірювань.
|
Кількість вимірювань |
Величина прямого вимірювання |
Засоби вимірювання |
Межа допустимої основної похибки приладу |
Межа допустимої основної похибки відліку |
|
5 |
Висота h |
Лінійка з ціною поділки 1 см |
h = ..... |
h = ..... |
|
5 |
Час t і t' |
Секундомір |
t = ..... |
t = ..... |
Обчислення похибки непрямого вимірювання
1. Виведемо формулу для розрахунку відносної похибки вимірювання J. Для цього:
а)
прологарифмуємо вираз (5):
![]() ,
,
отримаємо: ![]() ;
;
б) знайдемо часткові похідні від lnJ за змінними m, r, t, h:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
в) обчислимо відносну похибку
![]() .
.
2. Оскільки
 ,
то абсолютна похибка вимірювання
,
то абсолютна похибка вимірювання
![]() .
.
Запис кінцевих результатів вимірювання
Прямі вимірювання: h = ..... ....., Eh = ....% , для = 0,95 ;
t = ..... ....., Et = ....% , для = 0,95;
t' = ..... ....., Et = ....% , для = 0,95.
Непрямі вимірювання: J = ..... ....., EJ= ....% , для = 0,95
J' =..... ....., EJ= ....% , для = 0,95
Експериментальне значення моменту інерції тягарців J0е = J - J' = ......
Теоретичне значення моменту інерції тягарців J0т = 4mR2 = ....