

ПИ-регулятор
.docxПРОПОРЦИОНАЛЬНОИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ
Статическую ошибку, возникающую при пропорциональном регулировании,
можно исключить, если кроме пропорционального ввести еще и интегральное звено. Последнее образуется путем постоянного суммирования ε за определенный промежуток времени и формирования сигнала управления, пропорционального полученной величине.
Математически этот процесс может быть описан следующей зависимостью:

где
 – коэффициент пропорциональности
интегральной составляющей, а
– коэффициент пропорциональности
интегральной составляющей, а
Тu ' постоянная времени интегрирования, параметр настройки регулятора.
Если
 0, то даже при незначительных отклонениях
регулируемой величины сигнал со временем
может достичь любой величины, что
приведет к перемещению регулирующего
органа до момента, пока ε не станет
равным 0.
0, то даже при незначительных отклонениях
регулируемой величины сигнал со временем
может достичь любой величины, что
приведет к перемещению регулирующего
органа до момента, пока ε не станет
равным 0.
Рассмотрим
физический смысл постоянной времени
интегрирования. Предположим, что на
вход регулятора поступил сигнал
 ,
а пропорциональная составляющая
отсутствует (
,
а пропорциональная составляющая
отсутствует ( = 0). При этом выходной сигнал будет
меняться по закону
= 0). При этом выходной сигнал будет
меняться по закону

По
истечении времени t =
 значение выходного сигнала будет равно
значение выходного сигнала будет равно


(рис.1.13а).
Таким образом, постоянная времени интегрирования в ПИ-регуляторе равна времени, в течение которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигнет значения, равного значению входного сигнала.
Переходной процесс в ПИ-регуляторе показан на рис.1.13б. Устраняя статическую ошибку интегральный регулятор, однако, ухудшает качество переходного процесса. Поэтому на практике применяют комбинированные ПИ-регуляторы.

Рисунок 1 - Закон регулирования (а) и переходной процесс (б) при интегральном (И) регулировании.
При этом используется как параллельное соединение пропорционального и интегрального звена (рис.2а), так и последовательное соединение (рис.2б).

Рисунок 2 - Структурная схема идеальных ПИ-регуляторов.
ПИ-регулятор оказывает воздействие на регулирующий орган пропорционально отклонению и интегралу от отклонения регулируемой величины.

Для схемы на рисунке 2а частотная характеристика ПИ-регулятора имеет вид :

При
скачкообразном изменении регулируемой
величины на значение ε0
ПИ-регулятор со скоростью, определяемой
быстродействием привода, перемещает
исполнительный механизм на величину
( ),
после чего исполнительный механизм
дополнительно перемещается в ту же
сторону со скоростью
),
после чего исполнительный механизм
дополнительно перемещается в ту же
сторону со скоростью
 ,
пропорциональной отклонению регулируемой
величины. Следовательно, в ПИ-регуляторе
при отклонении регулируемой величины
от заданного значения мгновенно
срабатывает пропорциональная (статическая)
составляющая регулятора, а затем
постепенно увеличивается интегральная
(астатическая) составляющая регулятора.
,
пропорциональной отклонению регулируемой
величины. Следовательно, в ПИ-регуляторе
при отклонении регулируемой величины
от заданного значения мгновенно
срабатывает пропорциональная (статическая)
составляющая регулятора, а затем
постепенно увеличивается интегральная
(астатическая) составляющая регулятора.
Переходная характеристика ПИ-регулятора для параллельного соединения на рисунке 2а показана на рисунке 3(прямая 1).

Рисунок 3 - Закон ПИ-регулирования регуляторов: 1 - для схемы на рисунке2а, 2 - для схемы на рисунке 2б.
Параметрами
настойки являются независящие друг от
друга коэффициенты усиления
 и постоянная времени интегрирования
и постоянная времени интегрирования
 .
.
Схема на рисунке 3б реализует закон регулирования

где
–
 постоянная
времени изодрома.
постоянная
времени изодрома.
Частотная характеристика ПИ-регулятора по схеме рисунке 3б имеет вид:

Таким
образом, ПИ-регулятор со структурной
схемой, приведенной на рисунке 3б, имеет
взаимосвязанные параметры настройки
статической и астатической частей по
коэффициенту
 .
Так, при настройке коэффициента усиления
.
Так, при настройке коэффициента усиления
 будет изменяться и постоянная времени
интегрирования:
будет изменяться и постоянная времени
интегрирования:

Рассмотрим
физический смысл постоянной времени
изодрома
 .
Предположим, что на вход регулятора
поступил постоянный сигнал
.
Предположим, что на вход регулятора
поступил постоянный сигнал
 .
Тогда
.
Тогда

При
поступлении на вход регулятора сигнала
 в начальный момент сработает
пропорциональная составляющая и на
выходе регулятора появится сигнал
в начальный момент сработает
пропорциональная составляющая и на
выходе регулятора появится сигнал
 .
В дальнейшем линейно начинает нарастать
выходной сигнал от интегральной
составляющей и при
.
В дальнейшем линейно начинает нарастать
выходной сигнал от интегральной
составляющей и при
 достигнет значения
достигнет значения
 .
.
 – это
время, в течение которого от начала
действия интегральной (астатической)
составляющей регулятора пропорциональная
(статическая) составляющая удваивается.
Переходной процесс при ПИ-регулировании
показан на рисунке 4.
– это
время, в течение которого от начала
действия интегральной (астатической)
составляющей регулятора пропорциональная
(статическая) составляющая удваивается.
Переходной процесс при ПИ-регулировании
показан на рисунке 4.

Рисунок 4 - Переходной процесс при пропорционально-интегральном регулировании.
ПИ-регулятор обеспечивает нулевую ошибку в установившемся состоянии.
Варианты структурных схем промышленных ПИ-регуляторов приведены на
Рисунке 5.

Рисунок 5 - Структурные схемы промышленных ПИ-регуляторов.
Выбирая ту или иную схему, можно подобрать наиболее подходящую структуру для Вашей задачи.
Рассмотрим следящую систему управления зеркалом телескопа, представленную на рисунке 6:

Электромеханическая постоянная времени ДПТ - Тм = 0.3 с
Постоянная времени якоря ДПТ - Тя = 0.015 с
Постоянная времени короткозамкнутой цепи ЭМУ - Ткз = 0.06 с
Постоянная времени цепи управления ЭМУ - Ту = 0.007 с
Постоянные времени последовательного корректирующего устройства:
T1 = 7.69 с
T2 = 2 с
T3 = 0.25 с
T4 = 0.059 с
T5 = 0.016 с
T6 = 0.007 с
T7 = 0.003 с
T8 = 0.281 с
T9 = 0.016 с
Коэффициент усиления скорректированной системы - Кsk = 77
Коэффициент усиления нескорректированной системы - Кnesk = 5
Коэффициент усиления ЭМУ - КЭМУ = 7
Коэффициент передачи редуктора - Кр = 0.075
Коэффициент усиления разомкнутой системы по возмущению - Кf= 0.039
Время регулирования - tp = 1 с
Показатель колебательности - M = 1.2
Для составления функциональной схемы САР необходимо знать все элементы, из которых состоит система.
В следящей системе управления зеркалом телескопа используются сельсин-датчик СД, сельсин-приемник СП, фазочувствительный выпрямитель ФЧВ, электромашинный усилитель ЭМУ, двигатель постоянного тока ДПТ и редуктор Р.
Функциональная схема системы автоматического регулирования представлена на рисунке 7:

Рисунок 7 – Функциональная схема
Принцип работы системы.
Система находится в покое, когда заданное и фактическое положение телескопа соответствуют друг другу.
Для измерения угла рассогласования следящей системы применяются сельсины, работающие в трансформаторном режиме.
При повороте ротора сельсина-датчика на угол вх на выходе сельсина-приемника создается напряжение соответствующей фазы и амплитуды.
Выходной сигнал сельсина-приемника поступает на фазочувствительный выпрямитель, задачей которого является преобразование входного переменного напряжения в постоянный ток, причем полярность выходного напряжения определяется фазой входного напряжения.
Выходной сигнал выпрямителя воздействует на обмотку управления электромашинного усилителя. Двигатель через редуктор воздействует на зеркало телескопа и управляет положением однофазной обмотки сельсина-приемника (ротор сельсина-приемника с помощью обратной связи возвращается в согласованное положение с ротором сельсина датчика и двигатель останавливается).
Если заданное и фактическое положения зеркала телескопа совпадают, то положения однофазных обмоток сельсинов одинаковы и система находится в покое. В противном случае система будет находиться в движении.
Процесс регулирования выглядит следующим образом:
вх ( = вх - вых) Uоу iоу Uдв nдв вых
( = вх - вых)
Структурная схема системы автоматического регулирования приведена на рисунке 8.
Построение переходных процессов в скорректированной и в нескорректированной системах.
Передаточная функция скорректированной системы имеет вид:

Передаточная функция скорректированной замкнутой системы имеет вид:

Схема, построенная в среде Matlab для нескорректированной системы (рисунок 9):
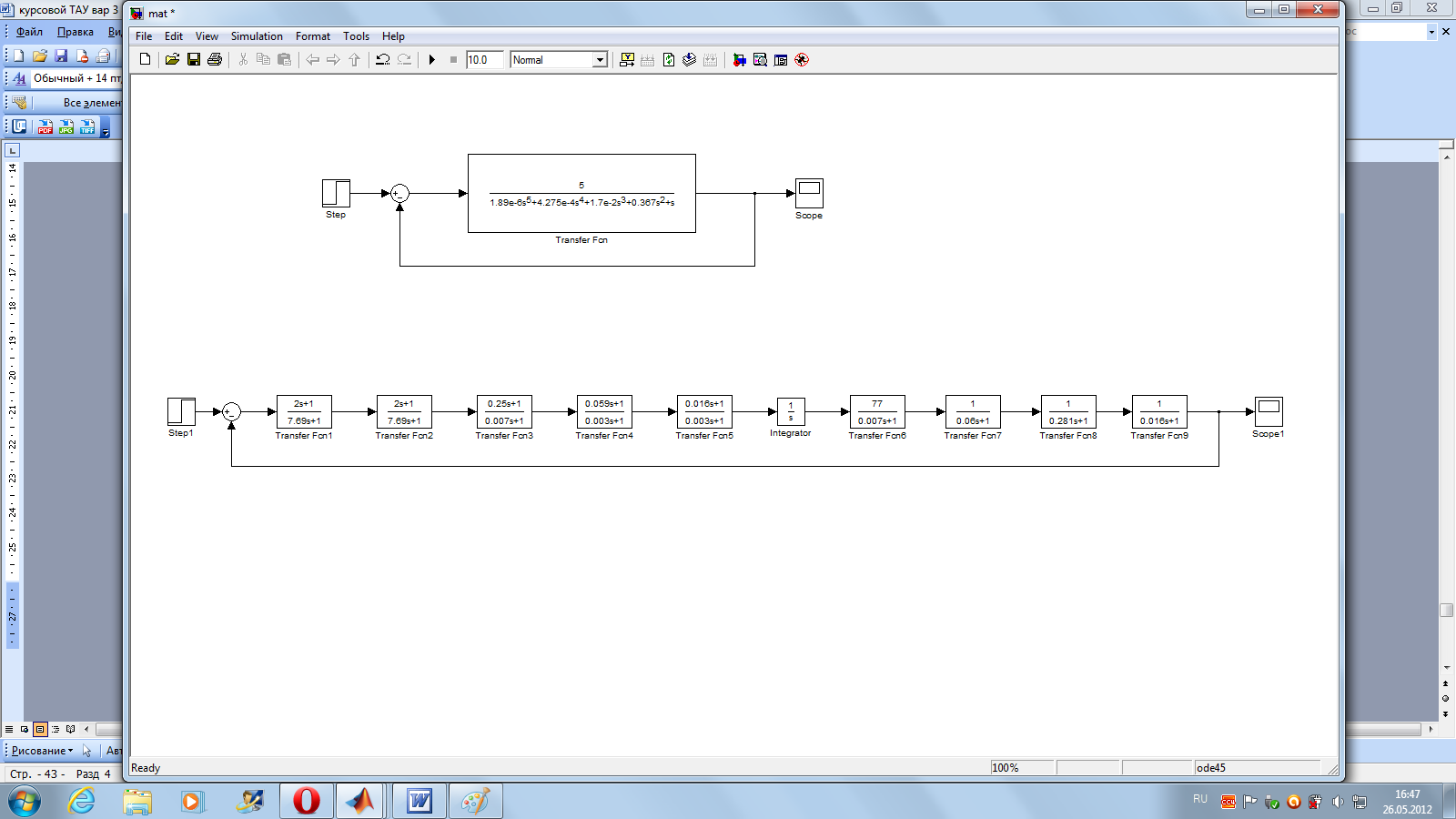
Рисунок 9 – Схема нескорректированной системы
Переходный процесс нескорректированной системы (рисунок 10):

Рисунок 10 – График переходного процесса нескорректированной системы
Схема, построенная в среде Matlab для скорректированной системы (рисунок 11):
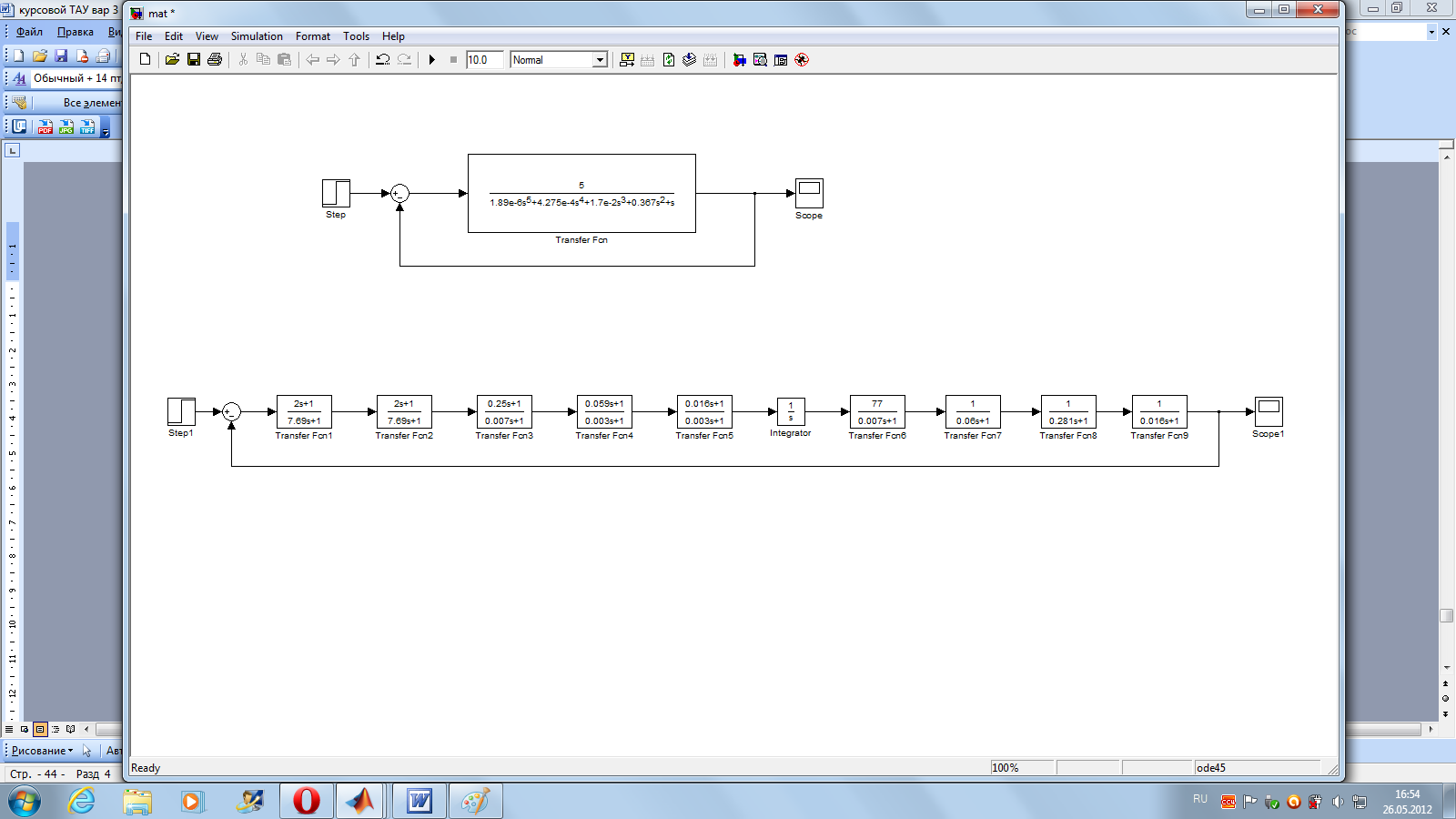
Рисунок 11 - Схема скорректированной системы
Переходный процесс скорректированной системы (рисунок 12):

Рисунок 12 - График переходного процесса скорректированной системы
Построение переходных процессов с ПИ-регулятором.





Схема САУ с ПИ-регулятором выглядит следующим образом:

Рисунок 13 – Схема САУ
Строим и моделируем схему в Matlab для передаточной функции.

Рисунок 14 - Схема с ПИ-регулятором.
Переходный процесс САУ с ПИ-регулятором представлен на рисунке 15:

Рисунок 15 – переходный процесс.