

Вопрос8
Вопрос 11
Аналитические методы исследования позволяют проводить анализ с заданной степенью точности. Кроме того, создание математических моделей механизмов позволяет решать задачи их оптимального синтеза при использовании ЭВМ.
Рассмотрим
пример кинематического исследования
синусного механизма (механизм двойного
ползуна), где кривошип 1 вращается с
угловой скоростью ω и угловым ускорением
ε (рис.20).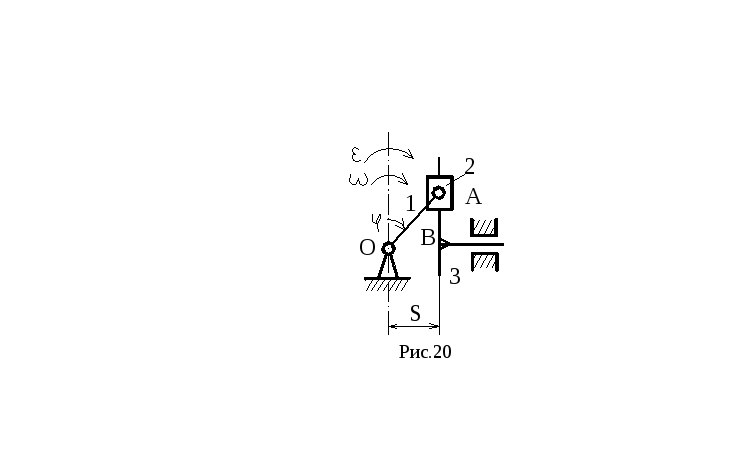
Тогда скорость и ускорение точки А равны:
VA=lOA·ω;
![]() .
.
Все точки звена 1 и 2 описывают окружности, а точки звена 3 движутся поступательно, имея перемещения, скорости и ускорения равные:
SB=lOA·sinφ=lOA·sinωt; VB=dSB/dt=dSB·dφ/dφ·dt=lOA·ω·cosφ;
aB=d2SB/dt=lOA·(ε·cosφ-ω2·sinφ)
при ε=0 aB=-lOA·ω2·sinφ.
При исследовании многих механизмов получаются достаточно громоздкие формулы, что не является препятствием при использовании ЭВМ.
При исследовании пространственных механизмов используются элементы векторной алгебры и векторного анализа. Положения, скорости и ускорения точек механизма выражаются в векторной форме, при необходимости вычисляются проекции на оси и плоскости. Примеры таких исследований изложены в учебной литературе.
Вопрос 12
Кинетостатический – это метод силового анализа подвижных техни-
ческих систем, основанный на принципе Даламбера, который имеет следующую формулировку: если к внешним силовым факторам, действующим на звенья технической системы, добавить силы и моменты пар сил инерции, то данная система будет находиться в квазистатическом равновесии и силовой анализ этой системы можно выполнять с использованием уравнений кинетостатического равновесия. Применяется для анализа подвижных технических систем при известных массах и моментах инерции звеньев.
Уравновешивающая сила Fу – это теоретическая сила, действующая
на звено приведения с целью обеспечения заданного закона движения.
Вектор уравновешивающей силы прикладывается к точке приведения,
а линия его действия является перпендикуляром к оси звена приведения,
и вектор этой силы направлен по движению звена приведения.Уравновешивающий момент пары сил Mу – это момент теоретиче-ской пары сил, действующей на звено приведения с целью обеспечения за-данного закона движения.
Приведенная сила – это теоретическая сила, которая вынуждает звено
приведения развивать мгновенную мощность, равную сумме мгновенных
мощностей,
развиваемых приводимыми силами:
где N– сумма мгновенных мощностей, развиваемых приводимыми си-
лами, Н; Vп – скорость точки приведения, м/с; n – количество приводимых
звеньев технической системы.
Приведенный момент пары сил – это момент теоретической пары
сил, который вынуждает звено приведения развивать мгновенную мощность,
равную сумме мгновенных мощностей, развиваемых приводимыми силами:
где ωi – угловая скорость звена приведения, с-1.
Приведенный момент инерции – это теоретический момент инерции,
которым должно обладать звено приведения, чтобы его кинетическая энергия
была равна удвоенной сумме кинетических энергий приводимых звеньев:
Внешние силовые факторы – это силы и моменты пар сил, действую-
щие на техническую систему (механизм) со стороны внешних систем (меха-
низмов) и совершающие работу над этой системой.
К ним относятся движущие силовые факторы и силовые факторы сопротивления.Факторами сопротивления являются силовые факторы полезного сопротивления и силовые факторы трения.
Теоретические силовые факторы – это силы и моменты пар сил, ко-
торые не существуют в реальности, а используются в различных видах ана-
лиза технических систем с целью их упрощения. К ним относятся приведен-
ные силовые факторы и силовые факторы инерции.
Силовыми факторами инерции являются силы инерции и моменты
пар сил инерции.
Момент пары сил инерции, H ⋅ м, вычисляется по формуле.
Приведенными силовыми факторами, действующими на звенья тех-
нических систем, являются приведенная масса и приведенный момент инер-
ции.
В общем случае значение приведенной массы любой технической
системы характеризуется следующим выражением.