

Вопрос 39
В общем случае целью кинематического анализа типовых кулачковых
механизмов при заданной схеме механизма является определение закона движения выходного звена, а при известных основных размерах всех звеньев – определение закона движения выходного звена.
Закон движения выходного звена определяют как функцию от угла поворота кулачка исходя из особенностей структуры кулачкового механизма и
заданных параметров:
S = f(ϕ),где ϕ – угол поворота кулачка.
Графоаналитический метод кинематического анализа может осуществляться двумя методами: методом кинематических диаграмм или методом кинематических планов. Метод планов применительно к анализу типовых кулачковых механизмов основан на использовании заменяющих механизмов.
Заменяющий механизм – это механизм, структура которого содержит
только низшие кинематические пары, имеющие при определенных положениях ведущего звена те же перемещения, скорости и ускорения для выходного звена, что и соответствующий ему механизм с высшей парой.
При выборе схемы заменяющего механизма основное внимание уделя-
ют сохранению законов движения ведущего и выходного звеньев кулачковых
механизмов и взаимному расположению осей эти звеньев. Каждая высшая
кинематическая пара заменяется двумя низшими парами, что приводит к появлению в структуре заменяющего механизма фиктивного звена 3.
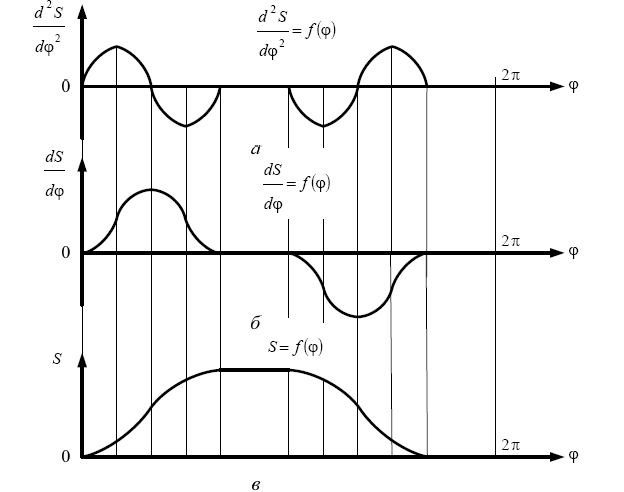
Вначале,
исходя из заданных условий, строится
диаграмма аналога усКорения
![]() Затем,
воспользовавшись графическим ин-
Затем,
воспользовавшись графическим ин-
тегрированием диаграммы аналога ускорения, сначала формируют диаграм-
му
аналога скорости
![]() потом,
используя графическое интегрирование
диаграммы аналога скорости, получают
диаграмму пути
потом,
используя графическое интегрирование
диаграммы аналога скорости, получают
диаграмму пути![]()
Основными критериями, которыми руководствуются при решении задач синтеза кулачковых механизмов, являются: минимизация габаритно-
массовых характеристик и значений углов давления, а также обеспечение
технологичности конструктивного профиля кулачка.
Синтез любого кулачкового механизма выполняется в два этапа: структурный синтез и метрический синтез.
На этапе структурного синтеза осуществляется формирование структурной схемы кулачкового механизма, т. е. обосновывается число звеньев подвижных звеньев и виды движения, ими совершаемого; количество и
вид элементов стойки; число, класс и подвижность кинематических пар,
количество и вид кинематических цепей. Дополнительно обосновывается
введение в структуру кулачкового механизма каждой избыточной связи и
местной подвижности. Определяющими условиями при выборе структурной схемы являются: заданные законы преобразования движения входного
и выходного звеньев и взаимное расположение осей этих звеньев. Если оси
входного и выходного звеньев параллельны, то выбирается плоская схема
механизма. При пересекающихся или перекрещивающихся осях необходимо использовать пространственную схему. В кулачковых механизмах, работающих под действием небольших силовых факторов, используют выходное звено с заостренной рабочей поверхностью. В кулачковых механизмах, работающих под действием больших силовых факторов, с целью повышения долговечности и уменьшения износа в состав структуру вводят ролик или увеличивают приведенный радиус кривизны контактирующих
поверхностей звеньев.
На этапе метрического синтеза определяются основные размеры звеньев кулачкового механизма и конфигурация рабочих поверхностей профилей
кулачка, обеспечивающая реализацию заданных законов движения и передаточной функции или максимального перемещения выходного звена.