

3. Силовые характеристики
Мощность привода характеризует возможность станка преодолеть при заданных режимах резания возникающие силы.
Общая мощность привода
![]()
![]() - полезная мощность
- полезная мощность
![]() - мощность затрат
на трение
- мощность затрат
на трение
Полезная мощность в приводе главного движения ровна:
![]() (кВт)
(кВт)
![]() - тангенциальная
составляющая силы резания
- тангенциальная
составляющая силы резания
![]() - скорость резания
м/мин
- скорость резания
м/мин
Для привода подач
![]() (к Вт)
(к Вт)
![]() - тяговая сила
(кГс)
- тяговая сила
(кГс)
![]() - минимальная
подача мм/мин
- минимальная
подача мм/мин
Мощность двигателя привода определяется
![]()
![]() - к.п.д. коробки
скоростей или коробки подач
- к.п.д. коробки
скоростей или коробки подач
Разработка кинематической схемы станка включает этапы
Выбор принципиальной схемы станка
Анализ движений инструмента и заготовки в процессе обработки
Составление и уточнение общей схемы станка
При этом необходимо:
по возможности уменьшить количество кинематических звеньев в цепи
зубчатые передачи от ведущего звена к ведомому располагать в порядке возрастания степени редукции.
Избегать много заходных червячных передач, которые обладают дополнительными линейными ошибками.
Привод станков
Типы приводов и диапазоны регулирования частот
движений
Совокупность передач от двигателей, обеспечивающих движение исполнительных органов, называют приводом. Различают механический, электрический, пневмо- и гидроприводы и их комбинации: электромеханический, электро-гидравлический. В приводах источником движения является электродвигатель, а тип привода определяется видом передач к исполнительному органу:
механическая, электрическая цепь или гидро-(пневмо) сеть. По характеру переключения частот (дискретному или непрерывному) различают ступенчатые и бесступенчатые приводы. Ступенчатый привод (рис. 2.1) включает в себя: двигатель (М), передачу (П) ременную или зубчатую, коробку скоростей (КС) или коробку подач (КП), систему управления (СУ) частотами вращения, шпиндель
(Ш) или суппорт (С). В станках с программным управлением привод включает датчик (Д) скорости и положения исполнительного органа или тахогенератор
(ТГ), а также обратную связь, как правило, электрическую систему управления.
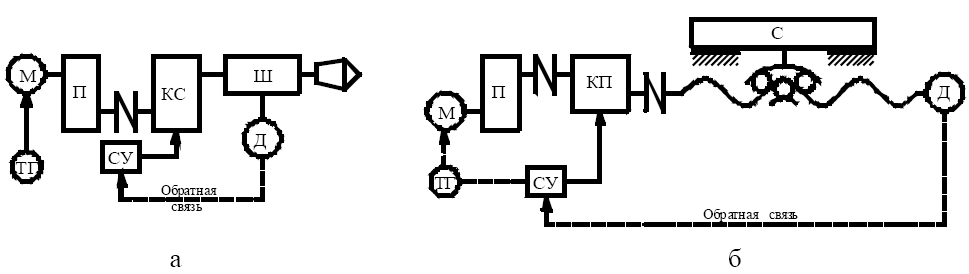
Рис. 2.1. Схема приводов шпинделя – а и суппорта – б
Структура привода со ступенчатым регулированием
Передачи со ступенчатым регулированием обычно компактны и просты, имеют высокий к.п.д. Кинематические возможности привода оценивают диапазоном регулирования:
![]() или
или
![]()
где
![]() ,
,![]() ,
,
а
![]() и
и![]() - значения минимальной и максимальной
подачи
- значения минимальной и максимальной
подачи
Для
современных станков
![]() привода главного движения находится в
приводах 10-200.
привода главного движения находится в
приводах 10-200.
При
ступенчатом регулировании должен
обеспечиваться ряд различных скоростей
![]() ,
находящихся в пределах nmin- nmax.
,
находящихся в пределах nmin- nmax.
Число
скоростей
![]() обычно
колеблется от 18 до 36, число подач
значительно выше.
обычно
колеблется от 18 до 36, число подач
значительно выше.
Еще в 1876 году русским академиком Гадолиным была обоснована целесообразность применения геометрического ряда частот вращения.
Для геометрического ряда характерны следующие зависимости:
1)
![]() ;
;![]()
где
![]() - знаменатель геометрического ряда
- знаменатель геометрического ряда
2)
![]()
3)
![]()
4)
![]()
Знаменатели рядов стандартизированы ( ГОСТ 8032-56) по следующим трем признакам.
1.Каждый
последующий получается, если брать
члены предыдущего через один.
2.Если
в ряду есть член n1, то через х
членов встретится частота nх+1 =
10n1 («принцип удесятерения»). Т.е.
знаменатель ряда![]() .
.
3.
Если в ряду есть член n1, то через
у членов встретится частота nу+1 =
2n1 («принцип удвоения»). Т.е.
знаменатель ряда![]() .
.
Для исходного ряда принято:
![]()
![]() т.е.
т.е.
![]()
Остальные ряды получаются по исходному-
![]()
![]()
![]()
Обычно используются только следующие знаменатели рядов 1,06:1,12:1,26,1,41:1,58:2
Знаменатели рядов 1,46 и 1,78 не удовлетворяют I- му принципу и их применять не желательно.
Исходный
или базовый ряд
![]() в станках не применяется.
в станках не применяется.
Ряд
![]() и 1,41 для универсальных станков,
и 1,41 для универсальных станков,
![]() для автоматов и
для автоматов и
![]() для тяжелых станков, где вспомогательное
время очень велико и нет необходимости
точной настройки на скорость.
для тяжелых станков, где вспомогательное
время очень велико и нет необходимости
точной настройки на скорость.
Частоты
вращения так же стандартизованы и
базовый ряд начинается с
![]() об/мин.
об/мин.
Практически
выбранные значения чисел оборотов не
должны отличаться от теоретических
более чем на
![]()
Геометрический ряд примечателенеще и тем, что позволяет проектировать сложные коробки скоростей и подач путем комбинации последовательно или последовательно-паралельно соединенных двухваловых коробок.
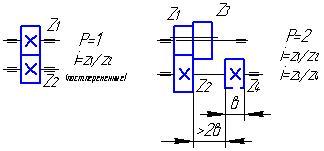
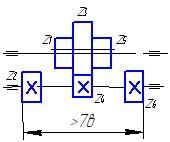
Двухваловая коробка– группа подач, связывающих два вала. Ее характеризуют два показателя: количество передач в группе р и величины их передаточных отношений i.
Число передач Р в группе ( еще называют числом ступеней) может быть равно 1,2,3,4. Большее количество передач не допускаются из-за увеличения длины валов и резкого падения их жесткости.
![]()
![]()
![]()
![]()
![]()
![]()
Коробки скоростей обычно состоят из нескольких групп передач, соединенных друг с другом последовательно и/или параллельно - последовательно. При последовательном соединении групп структура коробки скоростей носит название множительной, а при параллельно — последовательном - сложенной (составной).
В
станках с бесступенчатым регулированием
скорости движения привода (современные
станки и обрабатывающие комплексы с
ЧПУ) можно установить частоту вращения
абсолютно точно соответствующую
выбранной скорости резания при заданном
диаметре. Однако большое количество
находящихся в эксплуатации станков
имеют ступенчатые ряды частот вращения.
Поэтому вместо частоты, обеспечивающей
рассчитанную оптимальную скорость
резания при заданном диаметре приходится
выбрать ближайшую меньшую из имеющихся
на станке. Этой действительной частоте
nДбудет
соответствовать действительная скорость
резания![]() (м/мин), которая меньше расчетной на (V-VД).
(м/мин), которая меньше расчетной на (V-VД).
Относительную потерю скорости резания определяют уравнением:
![]() ,
,
которая будет тем меньше, чем меньше разность n–nД.
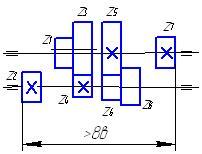
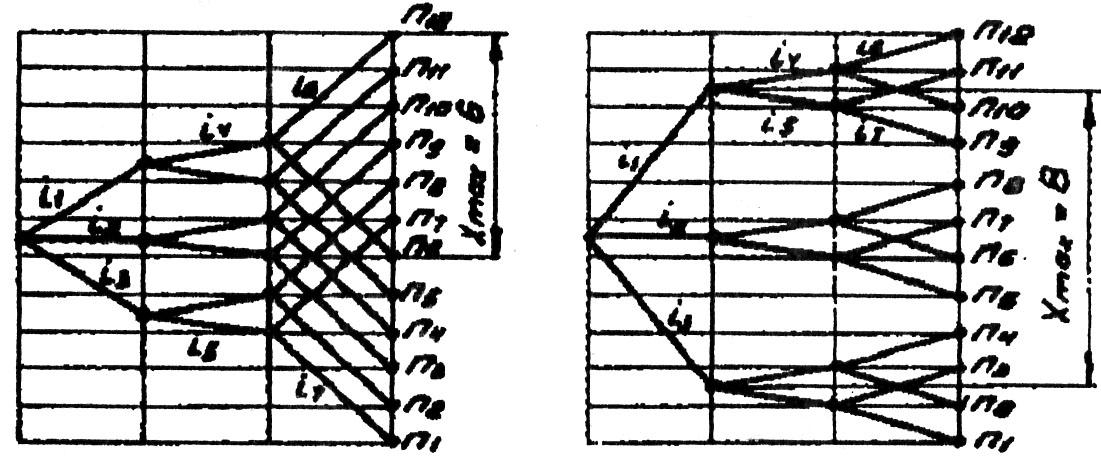
Рассмотрим для простоты устройство шести ступенчатой коробки скоростей (рис. 1, а). Для передачи вращения от вала I валуIIслужит группа передач на три ступени ( трехвенцовый блок на втором валу -колеса 6,2,4 и шестерни: 5,1,3 на первом), а от вала IIвалуIII— группа на две ступени (двух венцовый из блок шестерен 7 и9 на валу II и колеса 8, 10 на третьем валу). В результате последовательного соединения этих двухваловых коробок (обычная множительная структура) при одной частоте ведущего валаIведомый валIII(или шпиндель) может иметь шесть различныхчастот вращения.

Рис. 1. Схема шести ступенчатой коробки скоростей
Порядок чередования групп вдоль кинематической цепи характеризует конструктивный вариант коробки.
Его условно можновыразить в видеструктурной формулы:z=3·2=6.
Другой конструктивный вариант (порядок) имеет схема шести ступенчатой коробки скоростей (рис. 1, б). Здесь в первой группе две передачи (1—2, 3—4), а во второй — три передачи (5—6, 7—8, 9—10). Структурная формула для этого варианта:z= 2 ·3= 6. В общем виде число ступеней скорости
Z=![]() ,
..., ,
,
..., ,
где рa, рb, ..., рm— число передач в первой, второй, ...,m-йгруппах. Количество возможных конструктивных вариантов одной и той же структуры равно числу перестановок m групп:
q— число групп с одинаковым количеством передач. Для нашего случаяm= 2,q= 1,следовательно, (1·2)/1= 2,
а именно: :z=3·2=6 иz= 2 ·3= 6.
Отношение передаточных отношений передач в группе изменяется в φx раз и обусловлено кинематическим порядком(или вариантом) включения передач при переходе от одной скорости вращения шпинделя к другой.
Показатель степени х называется характеристикой группы. Структурную формулу, уточняющую не толькоконструктивный, но и кинематический порядок, принято записывать так:
![]() (1)
(1)
Здесь место группы в формуле показывает конструктивный порядок и номер группы, а индекс — ее характеристику. Для нашего примераz= 31·23= 6. Такая запись означает, что первая группа имеет три передачи, а ее характеристика х1= 1; вторая группа — две передачи с характеристикой х2= 3.
Группу передач, имеющую характеристику х = 1, называют основной группой, остальные группы (с х > 1) - переборными.
Величина
х в общем случае не может быть произвольной.
Если первая группа
является основной, то характеристика
последующих
групп равна
числу ступеней скорости полученных
совокупностью групповых передач,
кинематически предшествующих данной
группе. Это положение на
основании уравнения (1) представляется
в следующем виде. Если х1= 1, то х2= ра; х3=рарb,
…,xm=![]() …
…![]() . Например:z= 21·22·24= 8;z= 31·23·26=12;z= 31·33·29= 18.
. Например:z= 21·22·24= 8;z= 31·23·26=12;z= 31·33·29= 18.
Возможны и другие кинематические варианты. Общее их количество равно числу перестановок изmэлементов, т. е. ккин=m!. Для нашего случая ккин= 1·2 = 2.
Общее количество К возможных вариантов (конструктивных и кинематических) для обычных множительных структур равно: К= Ккс· Ккин.
При проектировании таких приводов используют, так называемый графоаналитический метод расчета. Суть этого метода сводится к построению и анализу структурных сеток и графиков частот.
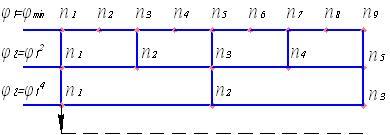
Порядок построения структурных сеток
1. На равных расстояниях проводят вертикальные линии в количестве на одну больше, чем число групповых передач (по числу валов передачи) и столько горизонтальных линий, сколько скоростей имеет привод. Расстояние между горизонтальными линиями равно lgφ.
2. Рядом с полем, которое отведено для одной групповой передачи, в порядке конструктивного расположения групп в приводе, указывают число передач в группе Pi и ее характеристику Xi.
3. На середине первой вертикали (середина диапазона скоростей привода) намечают точку, из которой симметрично проводят лучи в количестве, равном Pi, и расстоянием между концами лучей на следующей вертикальной линии, равным xi · lgφ.
4. Из каждой полученной точки на второй и последующих вертикальных линиях аналогичным путем проводят лучи для второй, третьей и т.д. групповых передач.
Пример построения структурной сетки
В качестве примера возьмем привод (рисунок 1), обеспечивающий двенадцать ступеней скорости (частот вращения) за счет последовательного соединения трех двух валовых шестеренных коробок (групп передач) – одной на три ступени (передачи) и двух на две.
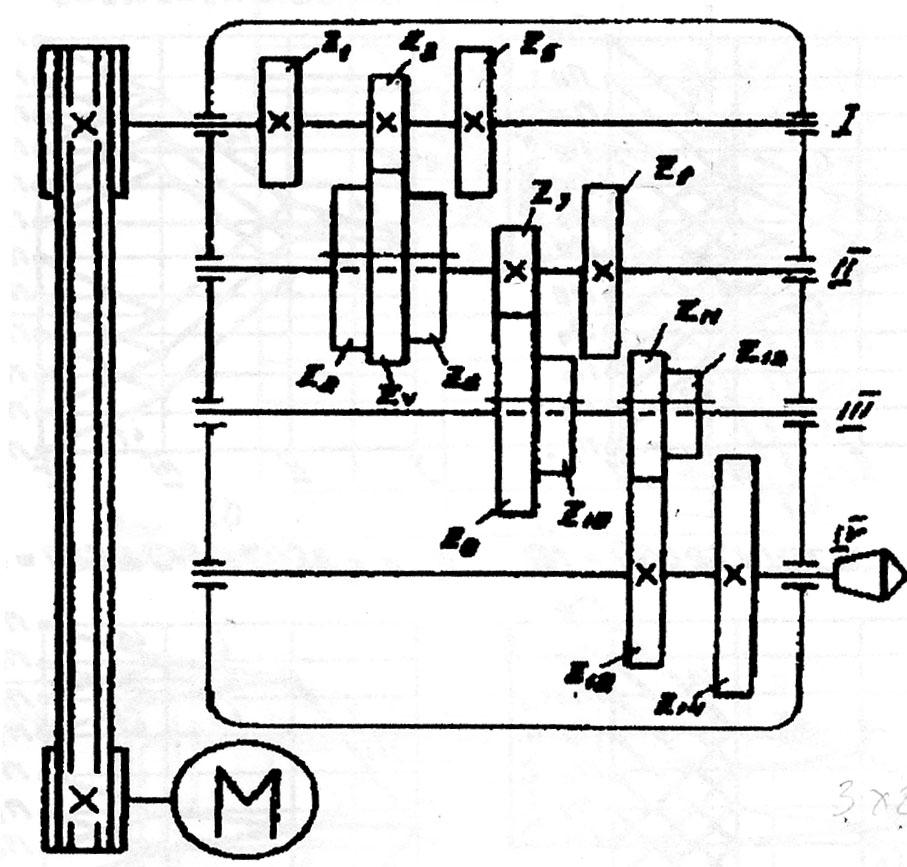
Рисунок 1 – Кинематическая схема привода на 12 ступеней скоростей
Его структурная формула будет иметь вид: z = 3 2 2 = 12. Если в структурной формуле цифрами в скобках обозначить характеристики групп, например z = 3(1) 2(3) 2(6), то получим один из вариантов структурной формулы. Такая запись означает, что первая в конструктивном отношении группа передач является основной (ее характеристика X0 = I), т.е. она состоит из передач, отношение соседних по значению передаточных отношений которых, равно φ1. Вторая группа передач является первой переборной с характеристикой, равной числу передач в основной группе, т.е. Х2 = 3, а отношение соседних по значению передаточных отношений в ней равно φ3. Третья группа передач - вторая переборная. Ее характеристика равна произведению числа передач в основной и первой переборной группах, т.е. X3 = 3 · 2 = 6, а отношение соседних по значению передаточных отношений в ней равно φ6. Как уже отмечалось, принципиально возможны варианты структурных формул, а значит, и конструкций приводов, полученные путем изменения конструктивного (последовательности расположения групп) и кинематического ( изменения значения характеристик) порядка, например:
z = 3(2) 2(6) 2(1), или z = 2(6) 2(1) 3(2) и т.д.
Для принятого конструктивного варианта (рисунок 1) можно написать шесть вариантов структурных формул:
1. z = 3[l] · 2[3] · 2[6] = 12 4. z = 3[4] · 2[l] · 2[2] = 12
2. z = 3[l] · 2[6] · 2[3] = 12 5. z = 3[2] · 2[6] · 2[l] = 12
3. z = 3[2] · 2[1] · 2[6] = 12 6. z = 3[4] · 2[2] · 2[l] = 12
и построить шесть вариантов структурных сеток (рис.2).
z = 3[l] · 2[3] · 2[6] = 12z = 3[l] · 2[6] · 2[3] = 12
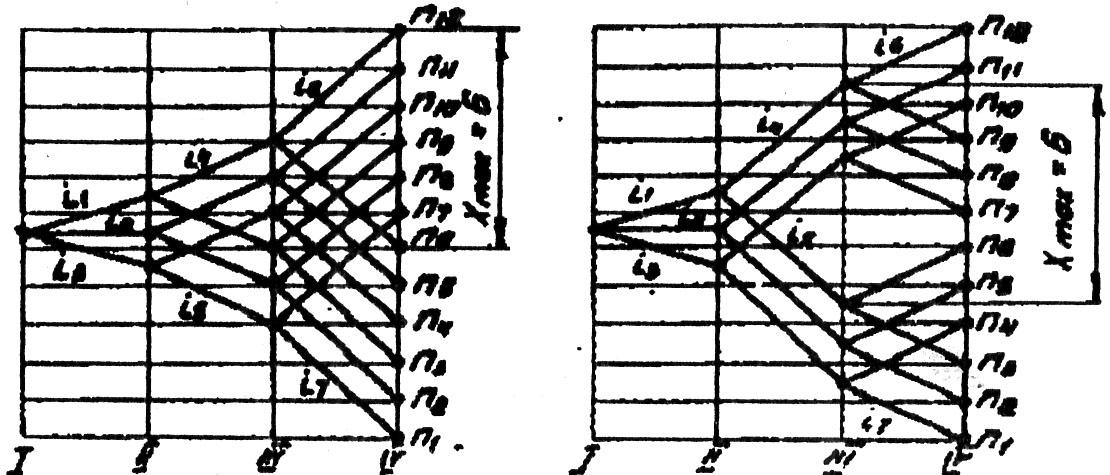
z = 3[2] · 2[1] · 2[6] = 12 z = 3[4] · 2[l] · 2[2] = 12
z = 3[2] · 2[1] · 2[6] = 12z = 3[4] · 2[1] · 2[2] = 12
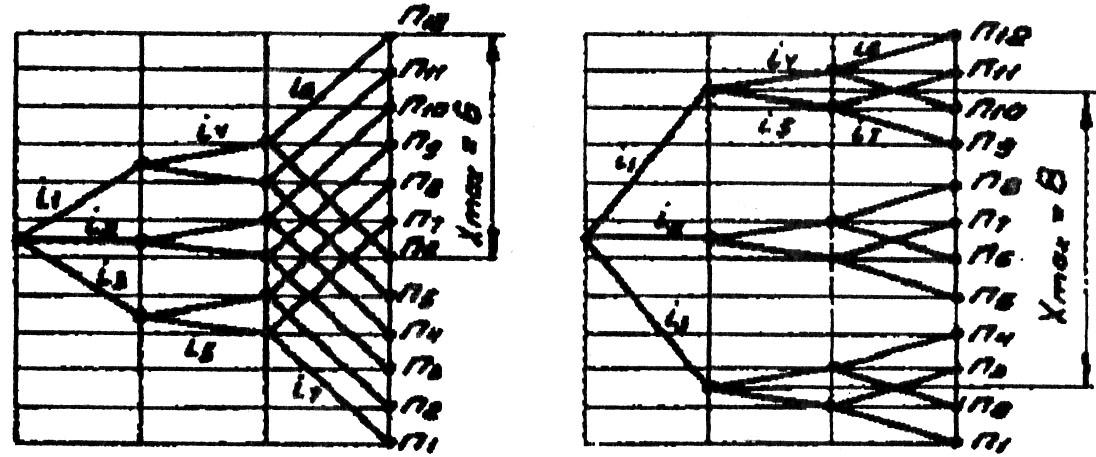
Рисунок 2 – Варианты структурных сеток для z= 3 · 2 · 2 = 12
После построения всех вариантов структурных сеток выбирают оптимальный вариант. При выборе оптимального варианта структурной сетки (варианта структурной формулы) необходимо учитывать следующее:
Во избежание чрезмерно больших диаметров зубчатых колес в коробках скоростей, а также в целях нормальной их работы практикой рекомендованы следующие предельные передаточные отношения в группах:
![]() и
и
![]()
Следовательно, наибольший диапазон регулирования в группе равен
![]() .
.
По этому необходимо сначала определить диапазон регулирования в последней переборной группе для всех структурных сеток (при выбранном значении φ и исключить из дальнейшего рассмотрения варианты, не удовлетворяющие условию:
![]()
В нашем примере для вариантов 1), 2), 3), 5) хmax = 6, а для вариантов 4), 6); - хmax = 8. Если знаменатель ряда φ частот вращения шпинделя выбран равным 1,26, то согласно таблице 1, для φ = 1,26 хmax ≤ 9, следовательно, все варианты структурных сеток удовлетворяют указанному условию.
Если выбран φ = 1,41, то из рассмотрения следует исключить варианты 4), 6).
При φ = 1,58 и более ни один из вариантов непригоден.
Таблица 1– Максимально допустимые величины Xmax
|
Для коробок |
φ | ||||||
|
1,06 |
1,12 |
1,26 |
1,41 |
1,58 |
1,78 |
2 | |
|
Скоростей |
36 |
18 |
9 |
6 |
4 |
3 |
3 |
|
Подач |
45 |
23 |
11 |
7 |
5 |
4 |
3 |
Далее выбирают структурные сетки, у которых в качестве основной и первой в конструктивном порядке взята группа с наибольшим числом ступеней, а переборные расположены в порядке убывания числа их ступеней. Из всех вариантов, удовлетворяющих данному условию, выбирают вариант с наиболее плотным расположением лучей в первых в конструктивном порядке передачах.
С учетом перечисленных рекомендаций обычно наиболее оптимальным, и для рассматриваемого примера в том числе, вариантом структурной сетки будет вариант: z = 3(1) 2(3) 2(6) = 12 (рисунок 3).
лучи располагаются более тесно.
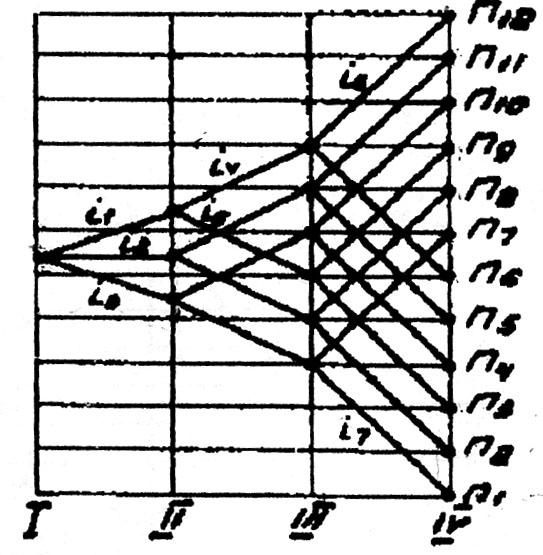
Рисунок 3 – Структурная сетка привода
z = 3(1) 2(3) 2(6) = 12
Выбрав оптимальный вариант структурной сетки, приступают к построению графика частот вращения.
Алгоритм построения графика частот вращения (чисел оборотов)
Для построения графика частот вращения должны быть известны:
а) φ – знаменатель ряда частот вращения;
б) фактические значения частот вращения от n1 = nmin до nz = nmax ;
в) n0 – число оборотов выбранного приводного электродвигателя;
г) полная кинематическая схема привода.
График частот вращения строится на поле аналогичном полю для построения структурных сеток, увеличив число вертикальных линий на одну (на вал приводного двигателя) и вместо порядковых номеров частот горизонтальным линиям присваивают их фактические значения.
С начала на этом поле, соединяя лучами линии валов, намечают цепь передач для снижения чисел оборотов с n0доn1. Для этого используют одну передачу каждой группы, в том числе и ременную, соединяющую вал двигателя и входной (первый) вал коробки, если она предусмотрена в кинематической схеме. Передаточные отношения этих передач распределяют таким образом, чтобы редукция от входной передачи к выходной плавно нарастала. При этом подразумевается, что:
-линия, соединяющая на графике две точки валов, обозначает передачу с передаточным отношением i = φm , где m – число интервалов lgφ, перекрываемых лучом;
-
если луч отклоняется вниз, то передача
понижающая, т.е.
![]() ,
если вверх – повышающая, т.е.i
= φm,
для горизонтального луча
i
= φ0
= 1.
,
если вверх – повышающая, т.е.i
= φm,
для горизонтального луча
i
= φ0
= 1.
При построении графика чисел оборотов необходимо выбирать на промежуточных валах такие точки, чтобы передаточные отношения были в пределах допустимых:
![]() и
и
![]() ,
,
т.е., чтобы при выбранном значении φ между точками луча, условно изображающего передачу, число интервалов не превышало указанное в таблице.
|
Передачи |
Числа интервалов для коробок скоростей | ||||||
|
1,06 |
1,12 |
1,26 |
1,41 |
1,58 |
1,78 |
2 | |
|
Понижающие |
24 |
12 |
6 |
4 |
3 |
2 |
2 |
|
Повышающие |
12 |
6 |
3 |
2 |
1 |
1 |
1 |
Для ременных передач передаточные отношения рекомендуется выбирать в пределах:
![]()
Дальнейшее построение ведут в соответствии с выбранным вариантом структурной сетки, выдерживая соответствующие характеристики групп.
Пример построения графика частот вращения (чисел оборотов)
Пусть задано:
- число скоростей шпинделя z = 12;
- структурная формула z = 3(1) 2(3) 2(6) = 12;
- знаменатель ряда φ =1,26;
- минимальное число оборотов шпинделя n1 = 50 об/мин;
- число оборотов приводного электродвигателя nэ = 1440об/мин
Кинематическая схема привода (рисунок 1), построение структурной сетки и выбор оптимального структурного варианта показаны выше.
Определяем ряд чисел оборотов шпинделя, по таблице "Предпочтительные числа и ряды предпочтительных чисел" (см. Приложение Б) :
n1= 50 об/мин. n7 = 200 об/мин.
n2 = 63 об/мин. n8 = 250 об/мин.
n3 = 80 об/мин. n9 = 315 об/мин.
n4 = 100 об/мин. n10 = 400 об/мин.
n5 =125 об/мин. n11 = 500 об/мин.
n6 =160 об/мин. n12 = 630 об/мин.
Проводим столько вертикальных линий, сколько валов в коробке скоростей, и дополнительно одну вертикальную линию, обозначающую вал электродвигателя (если привод осуществляется через ременную передачу). Далее проводим горизонтальные линии, обозначающие числа оборотов шпинделя и валов привода
На валу электродвигателя обозначаем точку – число оборотов электродвигателя nэ .
Общее передаточное отношение для снижения оборотов от nэ до n1 , будет:
![]() ,
,
где io – передаточное отношение одиночной передачи (в данном случае ременной);
i – передаточное отношение снижения оборотов от вала I до шпинделя;
i3 – наименьшее передаточное отношение в передаче между валами I и III;
i5 – наименьшее передаточное отношение в передаче между валами II и III;
i7 – наименьшее передаточное отношение в передаче между валами III и IV.
Снижение (или повышение) чисел оборотов от электродвигателя до вала I выбираем так, чтобы передаточное отношение ременной передачи было в пределах:
![]()
Примем число оборотов вала I равным 1000 об/мин.
Тогда
![]() ,
что удовлетворяет условию.
,
что удовлетворяет условию.
Передаточное
отношение при снижении оборотов от 1000
в минуту до n1
– 50 об/мин будет
![]() (рисунок
4, а).
(рисунок
4, а).
Принимаем передаточные отношения i3, i5, i7 такими, чтобы показатель степени при φ (число интервалов) не превышал табличных.
Поэтому
принимаем
![]() и проводим на графике
лучи, условно обозначающие эти передаточные
отношения.
и проводим на графике
лучи, условно обозначающие эти передаточные
отношения.
Дальнейшее построение (рисунок 4, б) проводим в соответствии с выбранным вариантом структурной сетки (рис.3).
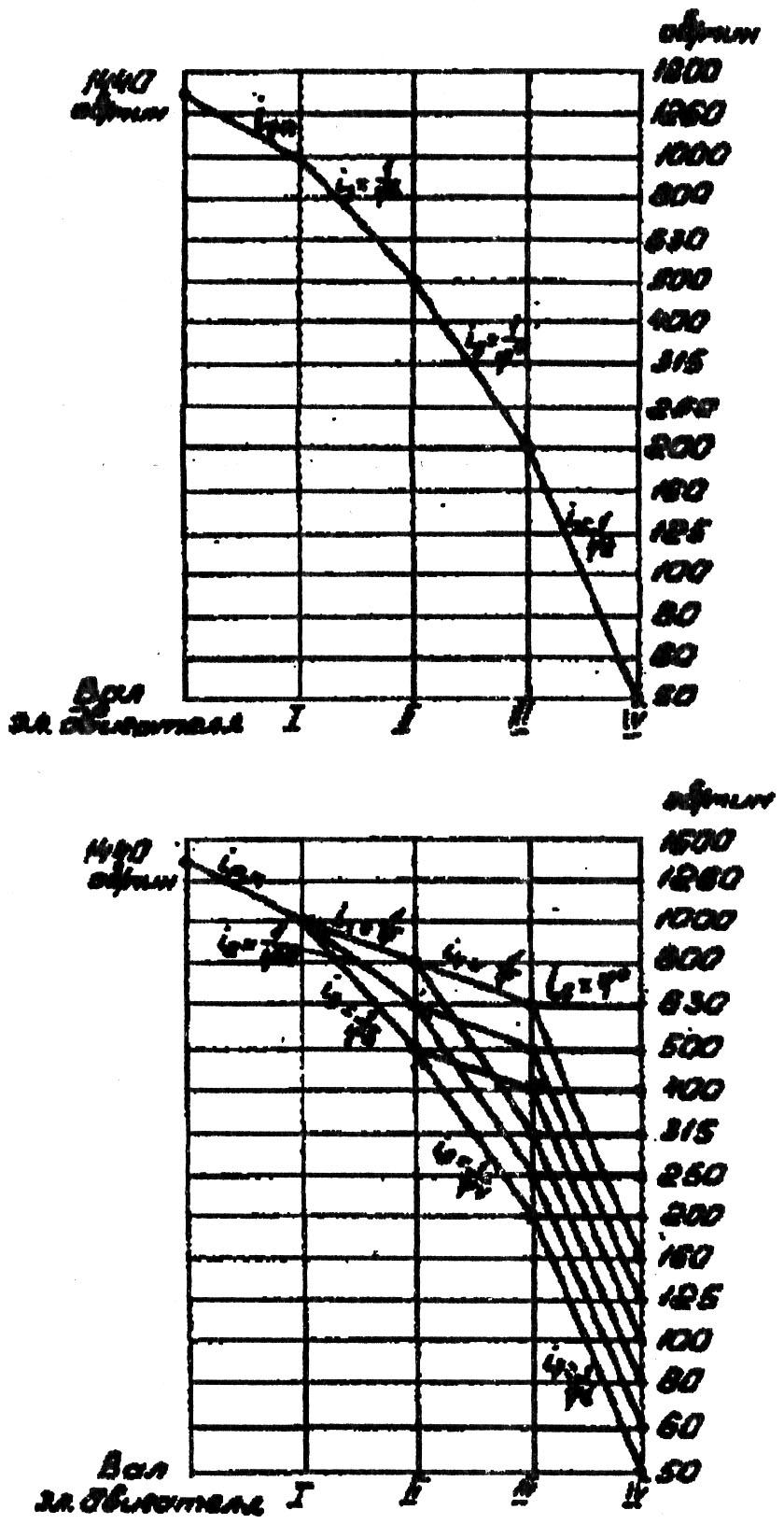
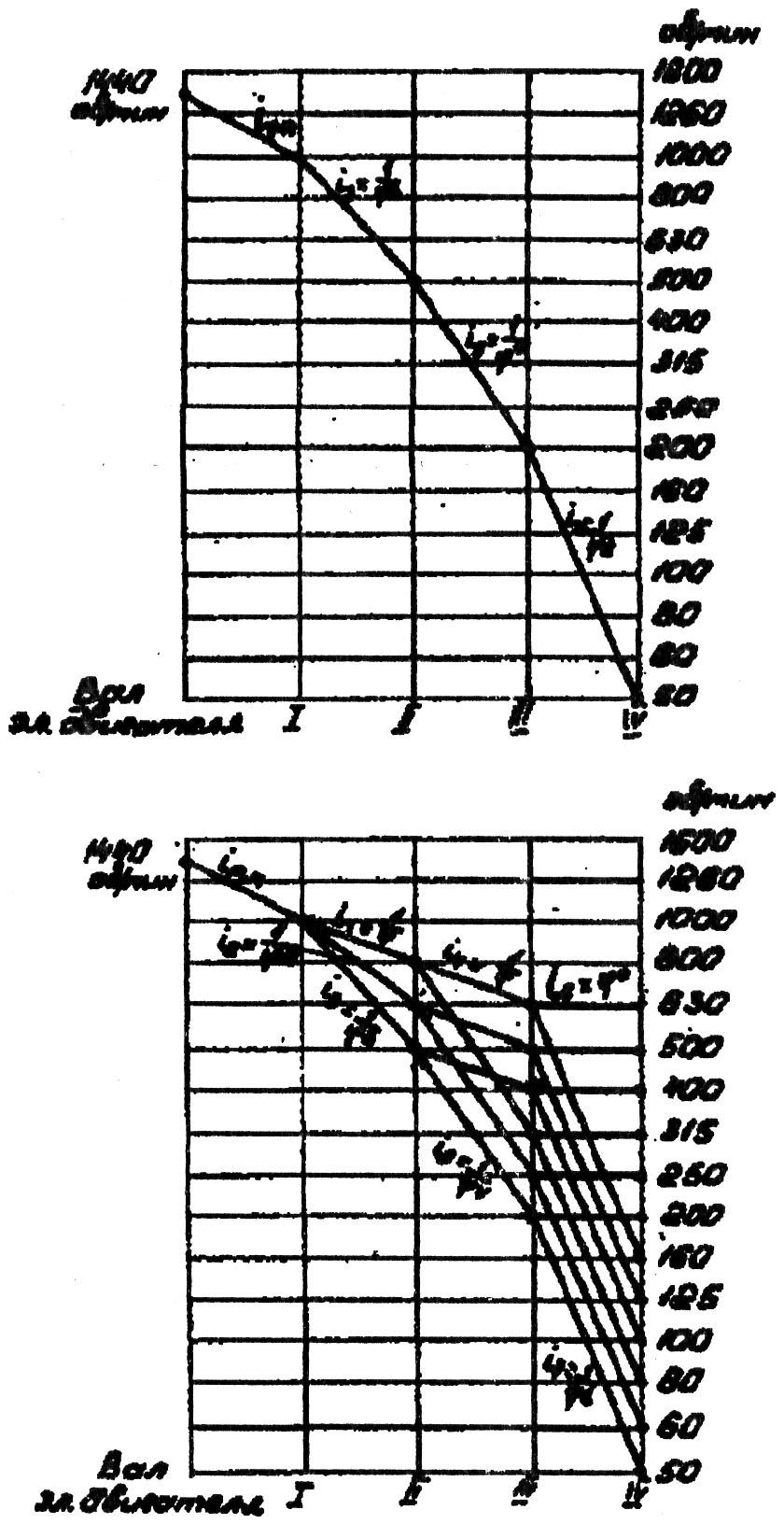 а
а
б)
Рисунок 4. График чисел оборотов: а) - понижающая цепь от nэ= 1440 об/мин до n1 = 50 об/мин на шпинделе; б) - график чисел оборотов.
Следующий этап - определение чисел зубьев зубчатых колес
Выбранные числа зубьев передач должны удовлетворять условиям:
-обеспечить необходимые (определенные из графика чисел оборотов) передаточные отношения;
- обеспечить постоянную сумму зубьев в пределах двухваловой передачи
![]()
Учитывая эти два условия:
![]()
![]() ,
получаем
,
получаем
![]() ,
,![]() (А)
(А)
По
формулам А, определяют числа зубьев,
задаваясь
![]() и зная
и зная![]() .
.
Однако
при подборе по этим формулам числа
![]()
![]() получаются дробными и при их округлении
можно выйти за пределы погрешности
получаются дробными и при их округлении
можно выйти за пределы погрешности![]() .
Для облегчения расчетов созданы спец.
таблицы ( Проников «Металлорежущие
станки и автоматы» стр. 102-104).
.
Для облегчения расчетов созданы спец.
таблицы ( Проников «Металлорежущие
станки и автоматы» стр. 102-104).
Далее производятпрочностные расчеты элементов коробок скоростей.