

2.1. Каркасное моделирование
Особенностью каркасной модели является то, что при ее описании используются геометрические объекты первого порядка – линии и ребра. Каркасные модели применяются для задания объектов, представляющих собой полиэдры, т. е. замкнутые многогранники произвольной формы, ограниченные плоскими гранями, или объекты, получаемые перемещением образующей, которая фиксируется в некоторых положениях. 3D – модель в этом случае содержит список координат вершин полиэдра с указанием связей между ними, т. е. ребер.
На рис. 4 показаны проволочная модель куба и список координат восьми вершин, связи между которыми задаются указанием двух горизонтальных граней и четырех вертикальных ребер.
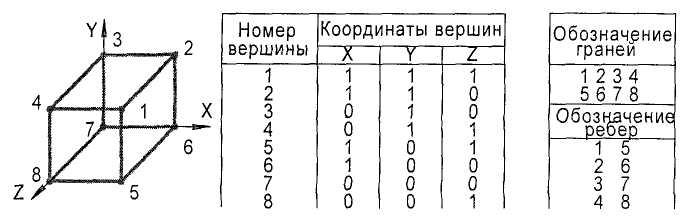
Рис. 4. Проволочная модель куба со списком координат вершин
Наиболее широко каркасное моделирование используется для имитации траектории движения инструмента, выполняющего несложные операции обработки детали, такие как фрезерование по 2,5 или 3 – м осям. Понятие 2,5 – й оси связано с тем, что более простые системы могут моделировать формы только с постоянным поперечным сечением. Такие формы относятся к так называемой двухсполовинной геометрии (2,5 – мерная геометрия). Неоднозначность интерпретации каркасной модели является одним из основных ее недостатков. Например, трехмерное изображение куба на рис. 4 можно было бы интерпретировать или как вид сверху, или как вид снизу (рис. 5а).

Рис. 5. Неоднозначность интерпретации каркасной модели:
а – куба; б – объекта со скругленными гранями
Операции по удалению скрытых линий при обработке каркасных моделей в общем случае можно успешно выполнить только вручную, потому что линии, невидимые на одних видах, видимы на других видах. Невозможность распознавания криволинейных граней и обнаружения взаимного влияния пространственных компонентов также ограничивает применимость каркасного моделирования. Так, например, аксонометрическому изображению объекта (рис. 5б) будут соответствовать некорректные представления заданной формы каркасными видами. Кроме перечисленных выше недостатков каркасного моделирования, необходимо также отметить трудности, возникающие при вычислении физических характеристик (например, массы, площади поверхности, центра тяжести или момента инерции) по данным каркасных моделей.
2.2. Поверхностное моделирование
Поверхностная модель определяется с помощью точек, линий и поверхностей. Поверхностное моделирование имеет следующие преимущества по сравнению с каркасным:
способность распознавать и изображать сложные криволинейные грани, обеспечивать средства получения тоновых трехмерных изображений;
способность распознавать особые построения на поверхности, например отверстия;
возможность получать качественное изображение и обеспечивать удобный производственный интерфейс со стенками с ЧПУ при имитации траектории движения инструмента в трехмерном пространстве;
обеспечение более эффективных средств для имитации функционирования роботов.
Методы поверхностного моделирования применяют в областях, где проектируются динамические поверхности, т. е. поверхности, взаимодействующие с внешней средой, или поверхности, к которым предъявляются повышенные эстетические требования.
Динамические поверхности разделяют на два класса: омываемые средой (внешние обводы транспортных средств, лопасти турбин и т. д.); трассирующие – направляющие среду (воздушные и гидравлические каналы, спиральные камеры и отсасывающие трубы турбин и т. д.).
При проектировании поверхностей применяют в основном каркасно – кинематический метод, основанный на перемещении некоторых образующих по образующим. При этом каркас задается как множеством характерных точек, так и ломаными линиями, проходящими через эти точки.
Существуют следующие способы задания как поверхностей, так и сплошных тел с помощью контуров, описанных в плоскости двумерными функциями:
1. Задание толщиной: s = F1(C, P, D, L). Опорный контур С перемещается в плоскости Р, а второй контур определяется путем переноса контура С по направлению вектора D на расстояние L.
2. Задание вращением: s = F2(C, A). С помощью контура С (разомкнутого или замкнутого) образуют сплошное тело вращением контура вокруг оси А.
3. Задание списком контуров: s = F3(LC, LP, LR, LS), где LC – список соединяемых контуров. Если LC(i) – i – й контур, то LP(i) – плоскость, в которой он лежит, LR(i) – первый из соединяемых объектов, LS(i) – направление обхода контура.
4. Задание толщиной и отверстиями: s = F4(LC, D, L). Эта конструкция сходна с конструкцией, описанной в п. 1. Способы их построения одинаковы (при этом LC(1) – внешний контур, а следующие контуры (LC (2),..., LC (n)) – внутренние, т. е. являются отверстиями).
5. Кинематическое задание в общем виде. Обобщение этого способа состоит в том, что поверхность, заданная жесткими контурами, перемещается по более сложной траектории.