

11.6. Матрична форма методу сил
При ручному розрахунку виникають значні обчислювальні ускладнення вже при ступеню статичної невизначуваності три і вище. Крім цього, зростає імовірність помилок при визначенні вантажних і одиничних переміщень, розв’язанні систем канонічних рівнянь та ін. З розвитком ЕОМ з'явилася можливість деякі рутинні і громіздкі обчислювальні операції перекласти на електронну машину. Однак ряд операцій, пов'язаних з підготовкою задачі, доводиться вирішувати вручну. Йдеться про побудову епюр вантажних і одиничних згинальних моментів. Чисельні значення вантажних і одиничних моментів, довжини ділянок, жорсткості елементів конструкції можна спеціальним чином обробити і занести в пам'ять ЕОМ. Усі подальші розрахунки ЕОМ виконує без участі людини за спеціально розробленою програмою. В результаті цих розрахунків ЕОМ друкує інформацію про розподіл внутрішніх силових факторів.
Сформулюємо матричний запис системи канонічних рівнянь. Для цього сформуємо кілька матриць, у число яких входять матриця-стовпець “зайвих” невідомих, матриця-стовпець вільних членів, матриця одиничних коефіцієнтів.
Матриця-стовпець
“зайвих” невідомих
![]() ,
матриця-стовпець вільних членів
,
матриця-стовпець вільних членів![]() і матриця одиничних коефіцієнтів
і матриця одиничних коефіцієнтів![]() мають відповідно вигляд:
мають відповідно вигляд:
 ;
;
 ;
; .
(11.20)
.
(11.20)
Матричний запис системи канонічної системи рівнянь з урахуванням (11.20) має вигляд:
![]() .
(11.21)
.
(11.21)
Розв’язання матричного рівняння (11.21) відносно вектора “зайвих” невідомих набуває вигляду:
![]() ,
(11.22)
,
(11.22)
де матрицю вільних членів можна визначити за допомогою матричного рівняння:
![]() .
(11.23)
.
(11.23)
Тут
![]()
матриця піддатливості. Для
матриця піддатливості. Для
![]()
го елемента системи матриця піддатливості
має вигляд:
го елемента системи матриця піддатливості
має вигляд:
 .
(11.24)
.
(11.24)
Матрицю одиничних коефіцієнтів знайдемо з матричного рівняння:
![]() .
(11.25)
.
(11.25)
З урахуванням (11.23) і (11.24) матрична форма системи канонічних рівнянь має вигляд:
![]() .
(11.26)
.
(11.26)
Матричне рівняння для визначення сумарних згинальних моментів записується у вигляді:
![]() (11.27)
(11.27)
Сформулюємо порядок розв’язання статично невизначуваних систем методом сил матричним способом:
1. Розбиваємо статично невизначувану систему на ділянки (Рис.11.32), вибираємо точку спостереження, вводимо додатні і від’ємні сторони і проставляємо зліва направо “характерні” перерізи на кожній ділянці.
2. Визначаємо ступінь статичної невизначуваності системи.
3. Вибираємо основну систему.
4. Зображуємо еквівалентну систему.
5.
Будуємо епюри вантажних моментів
![]() .
.

Рис.11.32.
6.
Зображуємо одиничні стани системи і
будуємо епюри одиничних моментів
![]() .
.
7. Формуємо матрицю вантажних моментів:
 ,
(11.28)
,
(11.28)
де
![]()
кількість ділянок
кількість ділянок
8. Формуємо матриці одиничних моментів:
 .
(11.29)
.
(11.29)
9. Формуємо матрицю піддатливості
![]() :
:
 ,
(11.30)
,
(11.30)
де
![]()
тий елемент матриці піддатливості
тий елемент матриці піддатливості
![]() ,
визначається з виразу (11.24).
,
визначається з виразу (11.24).
10.
Вводимо сформовані матриці у визначеній
послідовності у пам'ять ЕОМ. ЕОМ обчислює
значення всіх “зайвих” невідомих,
сумарних згинальних моментів
![]() і поперечних сил
і поперечних сил![]() у кожному з “характерних” перерізів
і друкує у вигляді відповідних векторів.
Друкується також вся вихідна інформація.
у кожному з “характерних” перерізів
і друкує у вигляді відповідних векторів.
Друкується також вся вихідна інформація.
11.
Використовуючи дані ЕОМ про вектори
![]() і
і![]() ,
будуємо відповідні сумарні епюри.
,
будуємо відповідні сумарні епюри.
12.
Методом вирізання вузлів будуємо епюру
поздовжніх сил
![]() .
.
11.7. Особливості розрахунку статично невизначуваних (нерозрізних) балок методом сил
Розглянемо
нерозрізну балку (Рис.11.33). Балка
навантажена зосередженою силою
![]() і має чотири опори: крайня ліва опора
жорстка, три інші опори шарнірно рухомі.
Ступінь статичної невизначуваності
балки дорівнює
і має чотири опори: крайня ліва опора
жорстка, три інші опори шарнірно рухомі.
Ступінь статичної невизначуваності
балки дорівнює![]() і може бути визначена з формули (11.3).
і може бути визначена з формули (11.3).

Рис.11.33
Розв’язуючи
цю задачу в традиційному плані, було б
природним відкинути зайві зв'язки,
взявши в якості “зайвих” невідомі
реакції в цих зв'язках
![]() ,
,![]() і
і![]() .
Однак, традиційне розв’язання
задачі шляхом відкидання зовнішніх
зв'язків виявляється при розрахунку
нерозрізних балок досить громіздким.
У зв'язку з цим зазвичай такі задачі
розв’язують
шляхом врізання шарнірів у тіло балки
таким чином, щоб при цьому балка стала
статично визначуваною і залишалася
геометрично незмінюваною. Варіант
основної системи в такій постановці
наведений на рис.11.34.
.
Однак, традиційне розв’язання
задачі шляхом відкидання зовнішніх
зв'язків виявляється при розрахунку
нерозрізних балок досить громіздким.
У зв'язку з цим зазвичай такі задачі
розв’язують
шляхом врізання шарнірів у тіло балки
таким чином, щоб при цьому балка стала
статично визначуваною і залишалася
геометрично незмінюваною. Варіант
основної системи в такій постановці
наведений на рис.11.34.
![]()
Рис.11.34.
Шарніри можна врізувати в будь-якому місці балки за умови її геометричної незмінюваності. Але простіше врізувати шарніри на проміжних опорах. В результаті ми отримуємо статично визначувану (розрізну) балку, що складається з декількох незалежних одна від одної балок. В якості “зайвих” невідомих при цьому приймаються внутрішні опорні моменти. Вигляд еквівалентної системи наводиться на рис.11.35.
Зміст канонічних рівнянь методу сил при такому виборі основної системи принципово змінюється. Якщо в колишній постановці ідея методу сил складалася у визначенні переміщень у місці відкинутих зв'язків і прирівнюванні цих переміщень нулю, то при розрахунку нерозрізних балок такий підхід не годиться.
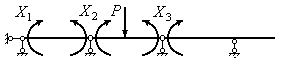
Рис.11.35
Виходячи
з енергетичної природи методу Мора,
момент може виконувати роботу тільки
на куті повороту перерізу. Але кути
повороту перерізів, у яких прикладені
опорні моменти, крім крайнього лівого,
в процесі деформації балки не дорівнюють
нулю. А от взаємний кут
![]() повороту двох прилягаючих до опори
перерізів на опорі, де був врізаний
шарнір, дорівнє нулю (Рис.11.3,б).
повороту двох прилягаючих до опори
перерізів на опорі, де був врізаний
шарнір, дорівнє нулю (Рис.11.3,б).

Рис.11.36
У цьому і є фізичний зміст системи канонічних рівнянь методу сил при розрахунку нерозрізних балок.