

Супроводження по дальності
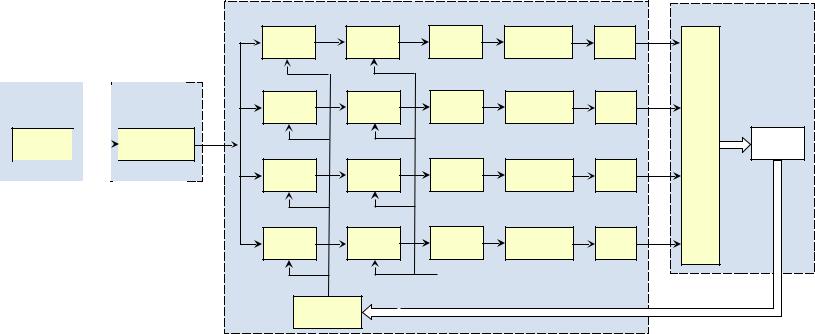
Сигнали цілі Σ з виходу комутатора огляд-супроводження оптичної частини антени (ОЧА) обробляються у каналі №1 (ВЧП1) високочастотного приймача і з його виходу на другій проміжній частоті 28 МГц надходять до 4-х однакових каналів дальності у складі: селектор дальності (СД), перетворювач частоти (ПЧ), кварцовий фільтр (КФ) із смугою пропускання 1.6 кГц, підсилювач третьої проміжної частоти 5 МГц (ППЧ) та інтегратор (∫).
Селектори дальності управляються стробами дальності Д1 ... . Д4. Строби . Д1 ... . Д3 формуються з 50-відсотковим перекриттям сусідніх стробів, а строб Д4 охоплює строби Д1 ... . Д3.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Н019- |
|
Н019- |
|||||||||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
|
01 |
|
|
|
|
|
|
|
|
|
Σ |
09 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
ОЧА |
|
|
|
|
|
ВЧП1 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
07/07/19
|
|
Н019- |
|
|
|
Ц-100, |
|
СД |
ПЧ |
03 |
КФ |
ППЧ |
∫ |
|
Н019- |
Д1 |
|
|
|
|
|
|
35 |
|
|
|
|
|
|
|
|
СД |
ПЧ |
|
КФ |
ППЧ |
∫ |
А |
|
Д2 |
|
|
|
|
|
Ц |
АС |
|
|
|
|
|
П |
||
СД |
ПЧ |
|
КФ |
ППЧ |
∫ |
|
|
|
|
|
|||||
Д3 |
|
|
|
|
|
|
|
СД |
ПЧ |
|
КФ |
ППЧ |
∫ |
|
|
Д4 |
|
|
fУГ |
|
|
|
|
|
ФСД |
|
|
|
|
|
|
52
На перетворювачі частоти всіх каналів з формувача гетеродинних сигналів видається напруга управляємого гетеродину однакової частоти fУГ,, яка відповідає швидкості зближення з ціллю,
визначеній каналом супроводження по швидкості.
В кінці інтервалу когерентного накопичення напруга на виході кожного з інтеграторів залежить від степені співпадіння відповідних стробів з імпульсними сигналами цілі. В аналого-цифровому перетворювачі (АЦП) блоку вводу-виводу ці напруги перетворюються у відповідні коди для їх подальшої обробки алгоритмом супроводження (АС) Ц-100.02.
Різниця кодів вихідних сигналів каналів №№1 і 3 в алгоритмі супроводження визначає помилку супроводження на n-му такті ΔD[n]=Dфільтру:1[n] - D3[n]. Супроводження здійснюється алгоритмом α-β
D[n]=DЕ[n-1]+ α·ΔD[n] |
α=0.5 |
|
˙ |
˙ |
β=0.02 |
D[n]= D[n-1]+β·ΔD[n]/Δt |
||
|
˙ |
|
DЕ[n]=D [n]+D[n]·Δt. |
|
|
При супроводженні строб Д2 співпадає з імпульсом цілі.
07/07/19 |
53 |
Підсвітлювання цілі і передача команд радіокорекції
Напівактивна ГСН ракети Р-27Р потребує підсвітлювання цілі когерентним сигналом, який формується передавачем РЛПК на тактах підсвітлювання. Потужний сигнал підсвітлювання до пуску ракети через бокові пелюстки ДСА РЛПК і ДСА ГСН попадає в її приймач і виключає можливість прийому слабких відбитих сигналів.
Перед пуском ракети в її пам’ять видається інформація, по якій після сходу ракети її ГСН зможе виявити відбитий сигнал і перейти до його супроводження по напрямку і швидкості.
Підсвітлювання здійснюється на одній із 10 спеціально виділених літерних частот підсвітлювання, яка перед польотом встановлюються перемикачем 470 блоку Н019-18 і відрізняються від літерних робочих частот РЛС.
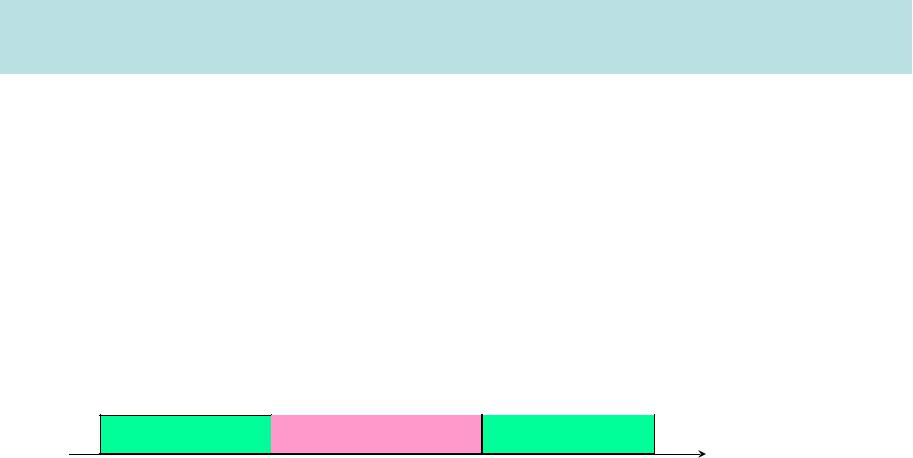
Робота РЛС Підсвітлювання Робота РЛС |
Такти |
|
В апаратурі самонаведення ракети для селекції цілі по швидкості застосовуються відбитий сигнал підсвітлювання (надходить через антену ГСН) і прямий сигнал підсвітлювання (надходить через спеціальну антену, ДСА якої спрямована назад).
Під час такту підсвітлювання і радіокорекції тривалістю 30.72 мс супроводження цілі продовжується в режимі екстраполяції. Такти
підсвітлювання та супроводження формуються по черзі: П – С – П – С … |
|
07/07/19 |
54 |
Політ ракети на інтервалі від пуску до виявлення відбитих сигналів здійснюється по програмі, яка враховує параметри руху цілі на момент пуску. Протиракетним маневром в ДРБ ціль може спробувати уникнути її виявлення ракетою. Команди радіокорекції в сигналах підсвітлювання цілі корегують введені перед пуском параметри руху цілі і забезпечують виявлення маневруючої цілі ГСН ракети.
В сигналах радіокорекції мітяться поправки до трьох координат цілі, до трьох складових її швидкості і разові команди – всього 7 блоків команд. Поправка (разова команда) передається двома розрядами трійкової системи зчислення (-1, 0 і +1).
Код сигналу |
Команда |
1; 1 |
поправка +3 |
1; 0 |
поправка +2 |
0; 1 |
поправка + |
0; 0 |
поправка 0 |
|
0; -1 |
поправка - |
|
|
-1; 0 |
поправка -2 |
|
07/07/19 |
-1; -1 |
поправка -3 |
55 |

Цифри “+1”, “-1” і “0” розряду передаються частотно-маніпульованими сигналами на основі “прямого” (Fм1 - Fм1 - Fм1 - Fм2 - Fм1), “зворотного” (Fм2 – Fм2 – Fм2 – Fм1 – Fм2) і “нульового” (без модуляції) 5-розрядних кодів Баркера: прямого +1,+1,+1, -1, +1 та інверсного -1, -1, -1, +1, -1.
Символ |
Код модуляції |
|
|
Сигнал модуляції |
|
|||
+1 |
Fм1 - Fм1 - Fм1 - |
U(t) |
F |
F |
F |
F |
F |
|
Fм2 - Fм1 |
m1 |
m1 |
m1 |
m2 |
m1 |
|||
|
|
|||||||
|
|
|
|
|
|
t |
||
|
|
|
|
|
|
|
||
0 |
Без модуляції |
U(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
Fм2 - Fм2 - Fм2 - |
U(t) |
Fm2 |
Fm2 |
Fm2 |
Fm1 |
Fm2 |
|
- 1 |
|
|
|
|
|
|||
Fм1 - Fм2 |
|
|
|
|
|
t |
||
|
|
|
|
|
|
|||
Команди радіокорекції одній ракеті займають (30.72+20.48)х7=358.4 мс. В РЛПК передбачена можливість послідовної передачі команд радіокорекції трьом ракетам - кадр радіокорекції триває 358.4х3≈1 с.
07/07/19 |
56 |

4. Застосування РЛПК літаків Міг-29 і Су-27
Застосування РЛПК літака Міг-29
РЛПК-29 “Рубін” забезпечує:
1.Пошук, виявлення, визначення координат і розпізнавання державної приналежності повітряних цілей.
2.Автоматичне супроводження “на проході” до 10 цілей.
3.Вибір і захоплення на супроводження цілі по критерію D/D˙=min.
4.Автоматичне супроводження по координатам і швидкості зближення однієї цілі.
5.Формування команд цілевказання ракетам та обчислення зон їх пуску.
6.Підсвітлювання цілі, формування і передачу команд радіокорекції в разі застосування ракет з РГС.
7.Формування команд управління винищувачем при самонаведенні на ціль і команди ОТВОРОТ на вихід з атаки.
8.Виведення винищувача в район цілі і повернення на аеродром базування.
07/07/19 |
57 |
Режими роботи РЛПК
1.Пошук, виявлення і визначення координат цілей, супроводження “на проході” із продовженням огляду повітряного простору.
2.Безперервна пеленгація однієї цілі з точним вимірюванням її координат без огляду повітряного простору.
3.Дискретно-безперервне підсвітлювання атакуємої цілі із формуванням і передачею команд радіокорекції.
4.Квазіогляд по цілевказанню від ОЕПрНК з визначенням дальності і державної приналежності цілі.
Взаємодія з системою державного розпізнавання
При ведучому каналі РЛПК розпізнавання здійснюється при виявленні цілі, при переході до її супроводження і перед пуском ракет.
Для узгодження у просторі ДСА РЛС і СРЗ-П формуються і управляються одним і тим же дзеркалом. Канал СРЗ-П має два опромінювача, симетрично зміщені відносно осі антени по горизонталі. Кільцевий міст шляхом комутації опромінювачів формує сумарну і різницеву ДСА.
Для узгодження в часі роботи РЛПК і запитувача СРЗ-П синхронізатор формує і видає синхроімпульси для запуску формувача сигналів запиту з упередженням відносно ІЗП. Упередження потрібне для компенсації втрат часу
на розкодування сигналів запиту і відповіді з таким розрахунком, щоб сигнал розпізнавання співпадав у часі з приходом відбитого ціллю зондуючого сигналу.
Супроводження своєї цілі і пуск ракет блокується. Блокування відключається перемикачем ЗАХВАТ ЧУЖОЙ - СВОЙ.
07/07/19 |
58 |
Взаємодія з ОЕПрНК
Взаємодія між РЛПК і ОЕПрНК здійснюється при:
-встановленні перемикача пульту управління ПУ-С31 в положення ТОРМОЗ;
-по команді НО (рос.: нарезное оружие), яка видається шляхом відкидання гашетки на ручці управління літаком, при цьому РЛПК працює в режимі СЧП.
Ручний або автоматичний вибір ведучого каналу залежить від положення перемикача режимів СУВ, від включення лазерного дальноміру та від типу обраних ракет.
При застосування гармати завжди ведучий ОЕПрНК. При виборі ракет з РГС ведучим являється РЛПК.
При огляді ведучий канал обирається перемикачем режимів СУВ, положення середини секторів пошуку РЛПК і ОЕПрНК співпадають.
При супроводженні цілі і ведучому РЛПК в ОЕПрНК видається цілевказання по напрямку і дальності, ОЕПрНК захоплює ціль на супроводження.
При супроводженні цілі і ведучому ОЕПрНК в РЛПК видається цілевказання по напрямку, РЛПК працює в режимі “квазіогляд” і при зближенні з ціллю захоплює
ціль на супроводження.
В режимах ТП – ББОЙ, ШЛЕМ і ОПТ (ОПТИТКА) ведучим являється ОЕПрНК. Після захоплення цілі на супроводження по напрямку включається випромінювання РЛПК на СЧП і по цілевказанню від ОЕПрНК ціль захоплюється на супроводження.
07/07/19 |
59 |
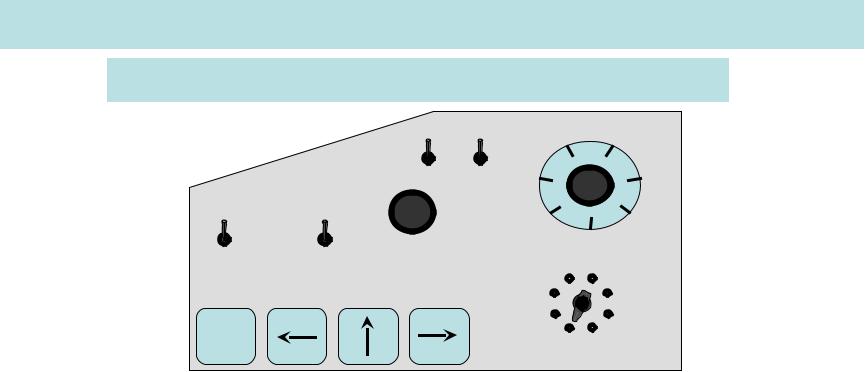
Органи управління СУВ-29 Пульт спеціальних режимів ПСР-31
А-Д НАВЕД БАЗА МЕТРЫ
ГЛАВН |
ЗАЛП |
|
|
ОДИН |
УСИЛ.ТП |
|
|
|
ОТКЛ |
0.5 К-ТА ЯРК. ШЛЕМА |
|
ПОДГ |
|
|
РУЧН |
|
|
|
0 |
30 |
4 |
2 |
|
0 |
|
|
|
||
|
|
5 |
|
0 |
|
||
1 |
|
0 |
|
|
|
0 |
6 |
|
|
0 |
|
|
|
7 |
|
|
|
|
|
СТРОБ ТП |
Б.БОЙ |
||
РЛС |
|
|
ШЛЕМ |
НВГ 

 ОПТ КБР φ0
ОПТ КБР φ0
РЕЖ. СУВ
ГЛАВН - ОТКЛ – розблокування пуску, стрільби, скидання.
ЗАЛП - ОДИН - 0.5 К-ТА – режим пуску або скидання,
А-Д – індикація в координатах азимут – дальність або азимут –швидкість,
НАВЕД – режим приборного наведення, ПОДГ РУЧН – розблокування команди ПР, ←↑→ - ручне управління сектором пошуку,
07/07/19
БАЗА МЕТРИ – введення бази цілі РЕЖ СУВ – вибір режиму роботи СУВ:
КБР – кобрування, НВГ – навігація, РЛС – вибір РЛПК,
СТРОБ – вибір ОЕПрНК із стробуванням,
Б.БОЙ - вибір ОЕПрНК у БМБ, ШЛЕМ –цілевказання від НВУ, ОПТ –цілевказання кнюпелем, φ0 - цілевказання способом φ60,
Пульт управління режимами ПУР-31
2 |
4 |
6 |
1 |
|
8 |
0 |
|
10 |
-1-2 -4 -6 ПЕРЕКЛ ΔН
Б.БОЙ В АВТ

 Д РЕЖИМЫ РЛС
Д РЕЖИМЫ РЛС
ИЗЛ |
КОМПЕНС |
СНП |
АП |
Э |
|
ППС |
О |
|
|
Т |
|
К |
|
|
К |
В |
|
|
ЛАПК |
ОТКЛ |
|
ЗПС |
ПЕРЕКЛ ΔН – ручне введення різниці висот винищувача і цілі,
РЕЖИМЫ РЛС – режим роботи РЛПК:
АВТ – автоматичне переключення ВЧП – СЧП, Б.БОЙ – режим БМБ, В – режим ВСТРЕЧА, Д – режим ДОГОН,
ИЗЛ-ЭКВ-ОТКЛ – ручне управління передавачем, КОМПЕС – включення компенсаційного каналу,
СНП - ЗПС – ручний вибір режиму РППК: ВЧП з СНП ППС або СЧП,
АП-ОТКЛ-АПК – управління режимом захисту від перешкод.
07/07/19 |
61 |