

3.3. Скорость и ускорение при траекторном (естественном) способе описания движения.
Этот способ применяется, когда точка движется по заданной линии (траектории).
Уравнением
 задается линия, по которой движется
точка; закон движения по
задается линия, по которой движется
точка; закон движения по
ней
 ,
где
,
где – дуговая координата, т.е. длина дуги
со знаком.
– дуговая координата, т.е. длина дуги
со знаком.


τ
 n
n
Базисные векторы вводятся следующим образом:
 –единичный вектор
( орт ) касательной,
–единичный вектор
( орт ) касательной,
 где
где
 -кривизна, а
-кривизна, а
 -единичный
вектор главной нормали
-единичный
вектор главной нормали
 –т.н. вектор
бинормали
–т.н. вектор
бинормали
Векторы
 лежат в так называемой соприкасающейся
плоскости – предельном при
лежат в так называемой соприкасающейся
плоскости – предельном при положении
плоскости,
содержащей
положении
плоскости,
содержащей
 (s)
и
(s)
и (s+
(s+ .
Кривизна
.
Кривизна характеризует скорость изменения
направления касательной; обратную к
ней величину ρ =
характеризует скорость изменения
направления касательной; обратную к
ней величину ρ = .
называют радиусом кривизны траектории.
.
называют радиусом кривизны траектории.
Вектор
скорости
 , где
, где
 является (единственной) проекцией
вектора скорости на направление
касательной и может быть любого знака.
является (единственной) проекцией
вектора скорости на направление
касательной и может быть любого знака.
Дифференцируя еще раз, получаем вектор ускорения
 .
.
Производную
 также запишем
как производную сложной функции
также запишем
как производную сложной функции


 ,
,
Тогда
 , где
(3.6)
, где
(3.6)
 - касательное
(тангенциальное ) ускорение,
- касательное
(тангенциальное ) ускорение,

 - нормальное
ускорение.
- нормальное
ускорение.
Глава 4. Кинематика твердого тела
Твердым телом будем называть тело, расстояния между точками которого не изменяются в
процессе движения.
Если в качестве модели реального объекта рассматривается тело, состоящее из тел-точек, положение которых описывается не только вектором положения, а и ориентацией (т.е. тела-точки могут вращаться), то в определение следует добавить слова « и взаимная ориентация не изменяется».
4.1 Кинематика плоского движения.
Плоским движением называется движение, при котором траектории ( а следовательно и скорости) всех точек тела лежат в плоскостях, параллельных одной фиксированной плоскости. Таково, например, движение книги по ровному столу. Ясно, что достаточно изучить движение одного лишь сечения – плоской фигуры (одного листа книги).
4.1.1 Основная формула кинематики твердого тела .Формула Эйлера
Положение
твердого тела вообще и плоской фигуры
в частности описывается вектором
положения какой-либо точки А, называемой
полюсом, и ориентацией, которую удобно
описывать с помощью жестко связанной
с телом тройки векторов. Для простоты
возьмем ортонормированную тройку
векторов, которые в отсчетном положении
обозначаются
 , а в актуальном в момент времени
, а в актуальном в момент времени .
В качестве отсчетного положения чаще
всего удобно взять положение в момент
времени
.
В качестве отсчетного положения чаще
всего удобно взять положение в момент
времени ,
тогда
,
тогда ,но
иногда в качестве отсчетного удобнее
взять положение, которое тело никогда
не занимало в прошлом и, возможно, никогда
не займет в будущем.
,но
иногда в качестве отсчетного удобнее
взять положение, которое тело никогда
не занимало в прошлом и, возможно, никогда
не займет в будущем.
 B
B

 B
B






 (t)
(t)
 А
А




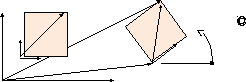
Рис.4.1.
При плоском движении ориентация задается одним углом (t). Введем вектор угловой
скорости
 ,
где единичный вектор
,
где единичный вектор перпендикулярен плоской фигуре , а его
перпендикулярен плоской фигуре , а его
направление согласовано с положительным направлением отсчета угла (t) в соответствии
с
принятой ориентацией пространства.
Так, в правоориентированном пространстве

направлен так, что с его с конца положительное направление отсчета угла (t) видно происходящим против часовой стрелки, т.е. « на нас» (рис 4.1). Заметим, что независимо от выбора
положительного
направления отсчета угла (t)
вектор
 направлен «
на нас», если фигура
направлен «
на нас», если фигура
в данный момент времени вращается против часовой стрелки.
Запишем
очевидное равенство
 .
(4.1)
.
(4.1)
Обозначим
для краткости
 и
разложим
и
разложим по актуальному базису :
по актуальному базису : ,
,
где
координаты
 постоянные.
постоянные.
Разложим
 по отсчетному базису
по отсчетному базису и продифференцируем по
и продифференцируем по
времени:
 . Нетрудно убедиться, что
. Нетрудно убедиться, что =
= и
совершенно
и
совершенно
аналогично
 , откуда
следует
, откуда
следует

 или
или
 (4.2)
(4.2)
Эта формула называется формулой Эйлера и она справедлива не только для плоского, но и
для произвольного движения твердого тела.
Дифференцируя
(4.1), получим с учетом (4.2)
 или
или
 (4.3)
(4.3)
Эту формулу будем называть основной формулой кинематики твердого тела.
Слагаемое
 называют
вращательной скоростью точки B вокруг
полюса A.
называют
вращательной скоростью точки B вокруг
полюса A.
Направление
этого перпендикулярного к
 слагаемого
легко получить, вращая фигуру
слагаемого
легко получить, вращая фигуру
вокруг полюса А – отсюда и его название.
 На рисунке
На рисунке
 - круговой вектор В
- круговой вектор В
 угловой скорости,
которому
угловой скорости,
которому

сопоставляется
прямой
 .
.


А