

X y
Рис. 5.3
Если тело обладает осью симметрии «N» - го порядка, т.е. тело переходит «само в себя»
при
повороте на угол (на рис.5.3в N=5), то можно доказать, что и
в этом
(на рис.5.3в N=5), то можно доказать, что и
в этом
случае
тензор инерции
 трансверсально-изотропный.
трансверсально-изотропный.
5.2.5. Эллипсоид инерции.
Тензору инерции, как и всякому симметричному тензору, можно сопоставить наглядныйгеометрический объект – так называемую тензорную поверхность.
Пусть
 тензор инерции в точке В. Построим
квадратичную форму и приравняем ее
единице:
тензор инерции в точке В. Построим
квадратичную форму и приравняем ее
единице:
 (5.30)
(5.30)
Это
уравнение поверхности, описываемой
вектором
 с началом в точке В, которая для
положительного тензора является
эллипсоидом. Действительно, записывая
с началом в точке В, которая для
положительного тензора является
эллипсоидом. Действительно, записывая в
главных осях, получим:
в
главных осях, получим:
 или, в каноническом
виде
или, в каноническом
виде
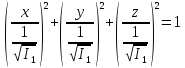 (5.31)
(5.31)
Уравнение
(5.31) – уравнение эллипсоида с полуосями,
равными

Так как протяженное в каком-либо
 направлении тело
имеет относительно
Z
направлении тело
имеет относительно
Z

оси,
совпадающей с этим направлением,

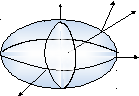
наименьший момент инерции, то M
эллипсоид инерции приблизительно
повторяет форму тела. B Y
1.
Найдем момент инерции

относительно
оси
 ,
задаваемой
,
задаваемой
вектором
 .
.
Имеем X
 ,
откуда
,
откуда
2. Вычислим дифференциал от уравнения (5.30):
 , отсюда следует,
что вектор
, отсюда следует,
что вектор
 перпендикулярен к эллипсоиду, поскольку
вектор
перпендикулярен к эллипсоиду, поскольку
вектор лежит в касательной плоскости к
поверхности.
лежит в касательной плоскости к
поверхности.
Кинетический
момент тела, вращающегося вокруг точки
В, равен
 ,
поэтому
,
поэтому направлен по нормали к поверхности
эллипсоида в точке его пересечения с
мгновенной осью вращения, проведенной
через точку В.
направлен по нормали к поверхности
эллипсоида в точке его пересечения с
мгновенной осью вращения, проведенной
через точку В.
3. Если тело обладает осью симметрии «N» - го порядка, т.е. переходит «само в себя»
при
повороте на угол ( рис.5.3в ), то «вмороженный» в него
эллипсоид инерции обладает тем же
свойством и, следовательно, является
эллипсоидом вращения с равными полуосями;
т.е. тензор инерции
( рис.5.3в ), то «вмороженный» в него
эллипсоид инерции обладает тем же
свойством и, следовательно, является
эллипсоидом вращения с равными полуосями;
т.е. тензор инерции трансверсально-изотропный.
трансверсально-изотропный.