

Часть4
.pdfРис. Д4.0 |
Рис. Д4.1 |
Рис. Д4.2 |
Рис. Д4.3 |
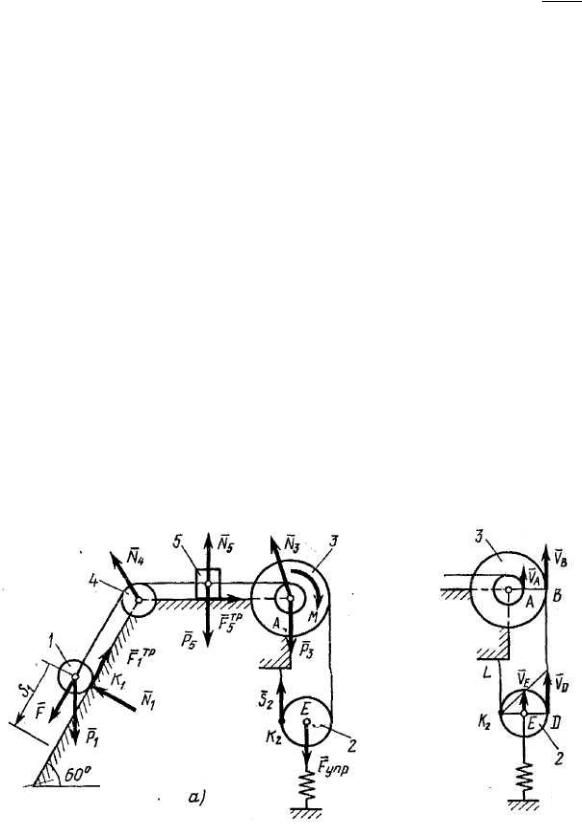
Рис. Д4.4 |
Рис. Д4.5 |
Рис. Д4.6 |
Рис. Д4.7 |
Рис. Д4.8 |
Рис. Д4.9 |
92

Таблица Д4
Номер |
m1, |
m2, |
m3, |
m4, |
m5, |
с, |
M, |
F = f(s), Н |
Найти |
|
условия |
кг |
кг |
кг |
кг |
кг |
Н / м |
Н×м |
|||
|
|
|||||||||
0 |
0 |
6 |
4 |
0 |
5 |
200 |
1,2 |
80(4+5s) |
ω3 |
|
1 |
8 |
0 |
0 |
4 |
6 |
320 |
0,8 |
50(8+3s) |
υ1 |
|
2 |
0 |
4 |
6 |
0 |
5 |
240 |
1,4 |
60(6+5s) |
υ2 |
|
3 |
0 |
6 |
0 |
5 |
4 |
300 |
1,8 |
80(5+6s) |
ω4 |
|
4 |
5 |
0 |
4 |
0 |
6 |
240 |
1,2 |
40(9+4s) |
υ1 |
|
5 |
0 |
5 |
0 |
6 |
4 |
200 |
1,6 |
50(7+8s) |
υC5 |
|
6 |
8 |
0 |
5 |
0 |
6 |
280 |
0,8 |
40(8+9s) |
ω3 |
|
7 |
0 |
4 |
0 |
6 |
5 |
300 |
1,5 |
60(8+5s) |
υ2 |
|
8 |
4 |
0 |
0 |
5 |
6 |
320 |
1,4 |
50(9+2s) |
ω4 |
|
9 |
0 |
5 |
6 |
0 |
4 |
280 |
1,6 |
80(6+7s) |
υC5 |
Теорема об изменении кинетической энергии механической системы (краткие сведения из теории)
Кинетическая энергия. Кинетической энергией точки называется
величина |
mV 2 |
, где m – масса |
точки, |
|
|
|
|
|
– |
абсолютная скорость |
точки. |
||||||||||||
|
V |
|
|||||||||||||||||||||
2 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кинетическая энергия механической системы |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
T = å |
mkVk2 |
, |
|
|
(1) |
|||||||||||
где mk |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||
– масса точки системы, Vk – абсолютная скорость этой точки. |
|
||||||||||||||||||||||
Для твердого тела из (1) следует, что |
|
|
|
|
|
|
|
|
|
||||||||||||||
при поступательном движении твердого тела |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
T = |
|
MV |
2 |
|
, |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
– скорость тела; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
где M – масса тела, V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
при вращении твердого тела вокруг неподвижной оси |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
T = |
|
J |
z |
ω2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|||
где J z |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
оси вращения, ω – |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
– |
момент инерции тела |
относительно |
угловая |
||||||||||||||||||||
скорость тела; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
при плоском движении тела |
|
2 |
|
|
|
|
|
|
|
|
ω2 |
|
|
||||||||||
|
|
|
|
|
T = |
MV |
|
+ |
|
J |
Cz |
|
|
||||||||||
|
|
|
|
|
C |
|
|
|
|
|
, |
|
|
||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||
где M – масса тела, VC – скорость центра масс тела, JCz – момент инерции тела относительно оси, проходящей через центр масс С тела, перпендикулярно плоскости сечения, ω – угловая скорость тела.
93

Момент инерции тела относительно оси z – это величина
J z = åmk hk2 ,
где mk – масса точки тела, hk – расстояние от этой точки до оси z.
Момент инерции тела зависит от формы тела и положения оси z. Значения J z для однородных тел простой формы (кольцо, стержень, диск,
прямоугольник, цилиндр и т. д.) приводятся в справочниках по механике; значения J z , необходимые для решения данной задачи, приведены ниже в
указаниях к решению.
Если задан радиус инерции ρ тела, то J z = Mρ2 , где M – масса тела.
Элементарная работа силы dA на бесконечно малом перемещении ds точки, в которой приложена сила, равна
|
(2) |
dA = F ds cos(F , V ) , |
где F – сила, ds – модуль бесконечно малого перемещения точки, V – скорость точки, в которой приложена сила (направление ds совпадает с
направлением V ). Выражение (2) – одна из возможных форм записи dA. Например, если учесть, что V = ds dt , то из (2) следует еще одна форма записи:
dt , то из (2) следует еще одна форма записи:
dA = F V cos( |
|
|
|
|
|
|
|
|
|
||||||||||
F |
, V |
) dt , |
(3) |
||||||||||||||||
где dt – время бесконечно малого перемещения. Из (2) (или (3)) следует, что |
|
||||||||||||||||||
dA = 0 |
если |
|
|
|
|
|
|
|
|
|
; |
|
|||||||
F |
V |
|
|||||||||||||||||
dA = 0 |
если |
|
|
|
|
= 0 ; |
|
||||||||||||
V |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
dA > 0 |
если |
( |
|
F |
, V |
) < π 2 ; |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
dA < 0 |
если |
( |
F |
, V |
) > π 2 . |
|
|||||||||||||
Если сила приложена к точке вращающегося тела, то, применяя (2), получим
dA = M z dϕ, |
(4) |
где M z – момент силы относительно оси вращения тела, |
dϕ – бесконечно |
малый угол поворота тела. Если на тело действует пара сил, то (4) дает элементарную работу пары сил, где M z – момент пары сил относительно оси z.
Работа силы на конечном перемещении точки из M 0 |
в M1 |
|||||
(M1) |
|
|
|
|
|
|
A = ò |
F cos( |
F |
, V |
) ds . |
(5) |
|
(M0 )
Из (5) следуют выражения для работы силы в частных случаях.
Работа силы тяжести (постоянной):
A(P) = ±P hC ,
где P=mg – сила тяжести, hC – перемещение центра масс тела по вертикали. Знак “–“ соответствует движению центра масс вверх.
94

Работа упругой силы пружины:
A( |
|
) = |
сλ20 |
− сλ2 , |
|||
F |
|||||||
|
|||||||
|
|
упр |
2 |
2 |
|||
где с – жесткость пружины, λ0 |
|
|
|||||
и λ – начальное и конечное удлинение (или |
|||||||
сжатие) пружины. |
|
|
|
|
|
||
Работа пары сил, приложенной к вращающемуся телу, при повороте |
|||||||
тела на угол ϕ1 , равна |
|
|
ϕ1 |
|
|||
|
|
|
|
|
|||
A = òM z (ϕ)dϕ , |
|||||||
где M z (ϕ) – момент пары |
|
|
0 |
|
|
||
|
сил относительно оси вращения. Если |
||||||
M z (ϕ) = M = const , то |
|
A = Mϕ1 . |
|||||
|
|
|
|||||
Если пара сил препятствует вращению тела, то A<0.
Теорема об изменении кинетической энергии системы.
Формулировка (в интегральной (конечной) форме): изменение
кинетической энергии системы на некотором конечном перемещении системы из одного положения в другое равно сумме работ всех внешних и внутренних сил, приложенных к точкам системы на соответствующих конечных перемещениях точек приложения этих сил.
Математическая запись:
T − T0 = å Ake + åAki .
Если система состоит из абсолютно твердых тел, соединенных нерастяжимыми нитями или стержнями (неизменяемая система), то åAki = 0 .
Указания. Задача Д4 – на применение теоремы об изменении кинетической энергии системы. При решении задачи учесть, что кинетическая энергия T системы равна сумме кинетических энергий всех входящих в систему тел; эту энергию нужно выразить через ту скорость (линейную или угловую), которую в задаче надо определить. При вычислении кинетической энергии катка 5, совершающего плоское движение, для установления
зависимости между скоростями его точек или между его угловой скоростью и скоростью центра масс воспользоваться понятием о мгновенном центре скоростей (кинематика). При вычислении работы все перемещения следует выразить через заданное перемещение s1, учитывая, что зависимость между перемещениями здесь будет такой же, как между соответствующими скоростями.
Последовательность действий при решении задачи см. в примере Д4.
95
Момент инерции шкива, блока или катка массы m относительно оси Cz , перпендикулярной пластине и проходящей через ее центр масс C , равен:
для сплошного однородного диска (цилиндра) радиуса R
для блока, масса которого равномерно распределена по ободу радиуса R
для ступенчатого шкива с радиусом инерции r
= m R2
JCz 2 ;
JCz = mR2 ; JCz = mρ2 .
Пример Д4. Механическая система (рис. Д4а) состоит из сплошного однородного цилиндрического катка 1, подвижного блока 2, ступенчатого шкива 3 с радиусами ступеней R3 и r3 и радиусом инерции относительно оси вращения ρ3 , блока 4 и груза 5 (коэффициент трения груза о плоскость
равен f ). Тела системы соединены друг с другом нитями, намотанными на
шкив 3. К центру Е блока 2 прикреплена пружина с коэффициентом жесткости с, ее начальная деформация равна нулю; массами нити и пружины пренебречь.
Система приходит в движение из состояния покоя под действием силы F = f (s) , зависящей от перемещения s точки ее приложения. На шкив 3 при
движении действует постоянный момент М сил сопротивления.
Дано: m1 = 8 кг, m2 = 0, m3 = 4 кг, m4 = 0, m5 = 10 кг, R3 = 0,3 м, r3 = 0,1 м, ρ3 = 0,2 м, f = 0,1, с = 240 Н / м, М = 0,6 Н × м, F = 20 (3+2s) Н, s1 = 0,2м.
Определить: угловую скорость ω3 в тот момент времени, когда s = s1, где s1 – перемещение центра масс катка 1.
б)
Рис. Д4
96
Решение. 1. Рассмотрим движение механической системы, состоящей из весомых тел 1, 3, 5 и невесомых тел 2, 4, соединенных нитями (рис. Д4а).
Для определения искомой угловой скорости ω3 воспользуемся теоремой
об изменении кинетической энергии системы в интегральной (конечной) форме:
T − T0 = å Ake + å Aki |
, |
(1) |
где T0 и T – кинетическая энергия системы |
в начальном и |
конечном |
положениях, å Ake и å Aki – алгебраические суммы работ действующих на
систему внешних и внутренних сил при перемещении системы из начального положения в конечное.
Сразу отметим в (1) равные нулю слагаемые. В начальный момент система находилась в покое, поэтому начальная кинетическая энергия равна
нулю (Т0=0). Далее, так как система является неизменяемой, то å Aki = 0 .
Поэтому на рисунке изображены только внешние силы, действующие на тела системы, а внутренние силы не показаны.
2. Определяем кинетическую энергию системы Т в конечном положении (левая часть уравнения (1)). Величина Т равна сумме кинетических энергий всех тел системы:
T = T1 + T2 + T3 + T4 + T5 . |
(2) |
Так как по условию задачи массы тел 2 и 4 равны нулю, эти тела не обладают кинетической энергией, однако для общности изложения мы проведем здесь вычисление кинетической энергии этих тел (но при решении своей задачи следует сразу полагать кинетическую энергию тел, массами которых пренебрегаем, равной нулю).
Кинетическая энергия катка 1, совершающего плоское (сложное) движение, равна
|
T1 = 1 m1 υC2 1 + |
1 JC1z ω21 , |
(3) |
|
2 |
2 |
|
где m1 |
– масса катка 1, |
|
|
υC1 – скорость его центра масс C1, |
|
||
ω1 |
– угловая скорость катка 1, |
|
|
JC1z |
– момент инерции катка относительно оси, |
проходящей через его |
|
центр масс перпендикулярно плоскости катка. Так как каток 1 является однородным цилиндром, то
|
m r 2 |
|
||
JC1z = |
1 1 |
. |
(4) |
|
2 |
||||
|
|
|
||
Кинетическая энергия блока 4, совершающего вращательное движение,
97
равна |
|
|
|
|
|
|
|
|
|
T |
= |
1 |
J |
z4 |
ω 2 |
, |
(5) |
|
4 |
|
2 |
|
4 |
|
|
|
где ω4 |
– угловая скорость блока 4, |
|
|
|
|
|
|
|
J z4 |
– момент инерции блока относительно оси, |
проходящей через его |
||||||
центр масс перпендикулярно плоскости блока. Если блок 4 является однородным диском, то J z 4 = (m4 r42 ) / 2 . Так как m4 = 0 , то J z4 = 0 и, следовательно, T4 = 0.
Кинетическая энергия груза 5, совершающего поступательное движение,
равна |
|
|
|
|
|
|
|
|
|
|
|
|
|
T = |
1 |
m |
|
υ2 |
, |
(6) |
|
|
|
|
2 |
|
||||||
|
|
|
5 |
|
5 |
|
5 |
|
|
|
где |
m5 |
– масса груза 5, υ5 – его скорость. |
|
|
|
|
||||
|
Кинетическая энергия блока 3, совершающего вращательное движение, |
|||||||||
равна |
|
|
|
|
|
|
|
|
|
|
|
|
|
T = |
1 J |
z3 |
ω |
2 , |
(7) |
||
|
|
|
3 |
2 |
|
3 |
|
|||
где |
ω3 |
– |
угловая скорость блока 3, |
|
|
|
|
|
|
|
|
J z3 |
– |
момент инерции блока относительно оси, |
проходящей через его |
||||||
центр масс перпендикулярно плоскости блока. Так как блок 3 является ступенчатым, и для него заданы масса m3 и радиус инерции ρ3 , то его момент
инерции J z3 вычисляется по формуле:
|
J |
z3 |
= m ρ2 . |
(8) |
|
|
|
3 |
3 |
|
|
Кинетическая энергия подвижного |
блока 2, |
совершающего плоское |
|||
(сложное) движение, равна |
|
|
|
|
|
|
T2 = 1 m2 υ2E + |
1 J Ez ω22 , |
(9) |
||
|
2 |
|
|
2 |
|
где m2 |
– масса подвижного блока 2, |
|
|
|
|
υE |
– скорость его центра масс E , |
|
|
||
ω 2 |
– угловая скорость подвижного блока 2, |
|
|||
J Ez |
– момент инерции блока относительно оси, проходящей через его |
||||
центр масс Е перпендикулярно плоскости блока. Если блок 2 является однородным диском, то J Ez = (m2 r22 ) / 2 . Так как m2 = 0 , то J Ez = 0 и, следовательно, T2 = 0.
98
Таким образом, с учетом выражений (3)-(9) кинетическую энергию
системы можно записать в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
|
|
|
|
m r2 |
|
|
|
|
1 |
|
|
|
|
|
|
m |
2 |
r2 |
|
|
|||
T = |
m u2 |
|
+ |
|
|
1 1 |
w2 |
+ |
|
m |
|
|
u2 |
+ |
|
2 |
w2 |
+ |
||||||||
2 |
|
|
|
4 |
|
2 |
|
|
|
4 |
||||||||||||||||
|
|
1 C1 |
|
|
|
|
1 |
|
|
|
2 |
|
E |
|
|
2 |
(10) |
|||||||||
|
|
1 |
|
|
|
|
|
|
m4 r42 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||
+ |
|
m r |
2 w 2 |
+ |
|
w 2 + |
|
m u2. |
|
|
|
|
||||||||||||||
2 |
|
|
2 |
|
|
|
|
|||||||||||||||||||
|
3 |
3 |
|
3 |
|
|
4 |
|
|
4 |
|
|
5 |
5 |
|
|
|
|
||||||||
3. Выполняем |
кинематический |
|
|
расчет |
системы, |
т.е. выражаем все |
||||||||||||||||||||
входящие в (10) линейные и угловые скорости ( υC1, ω1 , υE , ω2 , ω 4 , υ5 ) через искомую угловую скорость ω3 .
Каток 1 катится без скольжения по наклонной неподвижной плоскости, следовательно, абсолютная скорость точки K1 касания катка с плоскостью равна нулю. Поэтому точка K1 является мгновенным центром скоростей катка 1, откуда следует:
|
|
|
|
uC1 = w1 × K1C1 = w1 r1. |
|
|
|
|
|
(11) |
||||||||||
Первая нить, |
перекинутая |
через |
блок |
|
4, |
соединяет центр катка С1 с |
||||||||||||||
грузом 5. Принимая во |
внимание, что нить нерастяжима и не скользит по |
|||||||||||||||||||
блоку 4, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uC1 = w 4 r4 = u5 . |
|
|
|
|
|
|
|
(12) |
||||||||
Вторая нить одним концом привязана к грузу 5, а другой ее конец |
||||||||||||||||||||
намотан на малый барабан радиуса r3 ступенчатого блока 3, поэтому |
|
|||||||||||||||||||
|
|
|
|
u5 = w 3 r3 . |
|
|
|
|
|
|
|
|
|
|
(13) |
|||||
Из сравнения выражений (11)-(13) получаем: |
|
|
|
|
|
|||||||||||||||
u |
|
= w |
r |
= u |
|
; |
w |
|
= w |
|
r3 |
; |
w |
|
= w |
|
r3 |
. |
(14) |
|
|
|
|
|
r1 |
|
3 r4 |
||||||||||||||
|
C1 |
|
3 3 |
|
5 |
|
|
1 |
|
|
3 |
|
|
4 |
|
|
|
|||
Третья нить одним концом привязана к неподвижной точке L , а другой ее конец, огибая подвижный блок 2, намотан на большой барабан радиуса R 3
ступенчатого блока 3 (см. рис. Д4б). Участок нити BD не скользит по блокам 2
и 3, поэтому |
|
uD = uB = w 3 R 3 . |
(15) |
Подвижный блок 2 совершает плоское движение. Точка K2 , в которой с блока 2 сходит неподвижный участок нити LK2 , является мгновенным центром скоростей для блока 2 (он как бы катится по участку нити LK2 ). Отсюда следует:
uD = w 2 ×K2D = w 2 ×2r2 , uE = w 2 ×K2E = w 2 r2 . |
(16) |
99

Из сравнения выражений (15) и (16) получаем:
w 2 |
= w 3 |
R 3 |
; uE = w 3 |
R 3 |
. |
(17) |
|
2r2 |
2 |
||||||
|
|
|
|
|
Подставив результаты кинематического расчета (14) и (17) в выражение для кинетической энергии (10), с учетом невесомости блоков 2 и 4 получаем окончательно:
æ |
3 |
|
|
1 |
|
|
1 |
|
ö |
|
|
|
T = ç |
|
m r2 |
+ |
|
m r2 |
+ |
|
m r 2 |
÷w2 . |
(18) |
||
4 |
2 |
2 |
||||||||||
è |
1 3 |
|
3 3 |
|
5 3 |
ø |
3 |
|
||||
4. Вычисление работ сил. Укажем на рисунке все внешние силы (активные и реакции связей), действующие на точки системы (последовательно
по рисунку рассматривая тела системы, начиная с катка 1): F , P1, F1тр , N1 , N4 ,
P5 , F5тр , N5 , P3 , М, N3 , Fупр , S2 . Здесь учтено, что P2 = P4 = 0 . Теперь найдем сумму работ всех действующих внешних сил при том перемещении, которое будет иметь система, когда центр С1 катка 1 пройдет путь s1.
åAke = A(F ) + A(P1 ) + A(F1тр ) + A(N1) + A(N4 ) + A(P5 ) +
+A(F5тр ) + A(N5 ) + A(P3 ) + A(M ) + A(N3 ) + A(Fупр ) + A(S2 ) .
Отметим в этом выражении равные нулю слагаемые (последовательно по рисунку рассматривая тела системы, начиная с катка 1).
Каток 1.
A(F1тр ) = A(N1) = 0, так как скорость точки K 1 приложения этих сил равна нулю (качение без скольжения). Следует отметить, что модуль силы трения F1тр не равен произведению коэффициента трения на нормальную реакцию. При качении без скольжения сила трения должна лишь удовлетворять
неравенству |
|
|
1тр |
|
£ f |
|
|
|
|
1 |
|
(определение силы трения при качении рассмотрено |
|||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||
F |
N |
||||||||||||||||||||||||||||||
в задаче Д5). Работы A( |
|
) |
и A( |
|
|
|
|
|
|
|
|
||||||||||||||||||||
F |
P1 ) будут вычислены ниже. |
|
|
||||||||||||||||||||||||||||
Блок 4. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
A( |
|
|
|
|
4 ) = 0 , так как |
реакция |
|
4 |
приложена к |
точке, |
лежащей |
на |
|||||||||||||||||||
N |
N |
||||||||||||||||||||||||||||||
неподвижной оси блока 4. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Груз 5. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
A( |
|
|
|
|
|
|
|
|
|
скоростям точек, |
в |
||||||||||||||||||||
P5 ) = A( |
N |
5 ) = 0 , так как силы перпендикулярны |
|||||||||||||||||||||||||||||
которых они приложены. Работа A( |
|
5тр ) |
будет вычислена ниже. |
|
|
||||||||||||||||||||||||||
F |
|
|
|||||||||||||||||||||||||||||
Шкив 3. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
A( |
|
|
|
|
приложены к |
точке, |
лежащей |
на |
|||||||||||||||||||||||
P3 ) = A(N3 ) = 0, так как силы |
|||||||||||||||||||||||||||||||
неподвижной оси блока 3. Работа A(M ) будет вычислена ниже.
100

Подвижный блок 2.
A(S2 ) = 0 , так как скорость точки K2 приложения реакция S2 равна нулю (блок 2 катится без скольжения по неподвижной части нити, подобно тому, как каток 1 катится по неподвижной плоскости). Работа A(Fупр ) будет вычислена
ниже.
Таким образом, сумма работ всех действующих внешних сил
åAke = A(F ) + A(P1 ) + A(F5тр ) + A(M ) + A(Fупр ).
Вычислим каждое из этих слагаемых (последовательно по рисунку рассматривая тела системы, начиная с катка 1).
Каток 1.
Вычислим A(F ) . Так как сила F зависит от переменной s, то работа силы F на конечном перемещении определяется выражением:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( |
F |
) = òF (s)cos( |
F |
, |
υC1 ) ds . |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
Сила |
|
совпадает по |
направлению |
со скоростью υC1 |
центра катка 1, |
|||||||||||||||||||||||
F |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
cos( |
F |
, υC1 ) = 1, тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A( |
|
|
) = ò20(3 + 2s)ds = 20(3s1 + s12 ). |
|
(19) |
|||||||||||||||
|
|
|
|
|
|
F |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычислим A( |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
P1 ) . Сила тяжести |
P1 постоянна и образует со скоростью |
||||||||||||||||||||||||
υ |
|
угол 30o . Работа силы |
|
|
: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
C1 |
P |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
A( |
|
) = P s |
|
cos30o = P s |
|
sin 60o |
|
(20) |
||||||||||||
|
|
|
|
|
|
|
|
P |
1 |
1 |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
1 |
|
|
|
|
||||||
|
|
|
Груз 5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F тр |
|
||||||
|
|
|
Вычислим работу |
A( |
|
|
тр ) . Сначала найдем величину |
силы трения. |
||||||||||||||||||||
|
|
|
F |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
5 |
|
||||||||
Она определяется аналогично тому, как это было сделано в задаче Д1. Выделим из системы груз 5. На него действуют силы: P5 , F5тр , N5 , Q5 , где Q5 –
суммарная реакция левой и правой частей нити. Уравнение движения груза 5 имеет вид:
m5 a5 = P5 + F5тр + N5 + Q5 ,
где a5 – ускорение груза 5, совпадающее по направлению с его скоростью υ5 .
Спроектируем это уравнение на ось у, перпендикулярную направлению движения груза 5 (см. рис. Д1 и пример решения задачи Д1):
m5 a5 y = N5 − P5 ,
Так как a5y = 0 , то N5 = P5 и F5тр = f N5 = f P5 . В случае движения груза по
101