

-
Сущность статистического подхода к расчету систем.
Сущность статистического подхода к анализу и синтезу систем управления состоит в том, что при проектировании системы и оценке ее качества ориентируются не на самые тяжелые (но маловероятные) условия функционирования системы, а на некоторые средние, наиболее часто встречающиеся условия.
При действии случайных возмущений в системе никогда не наступает установившийся режим – она непрерывно переходит из одного состояния в другое. Управляемая величина и сигнал ошибки также непрерывно изменяются и представляю собой случайные сигналы. Поэтому оценку точности системы можно производить только при помощи статистических характеристик – математического ожидания и дисперсии двух указанных сигналов.
-
Характеристики случайных сигналов.
Числовыми характеристиками случайного сигнала являются среднее значение (математическое ожидание) и дисперсия.
Дисперсия Dх стационарного случайного сигнала равна среднему значению квадрата отклонений сигнала от математического ожидания mх.
Дисперсия – мера разброса мгновенных значений сигнала около математического ожидания.
Математическое ожидание и дисперсия – важные числовые параметры случайного сигнала, но они характеризуют его не полностью: по ним нельзя судить о скорости изменения сигнала во времени.
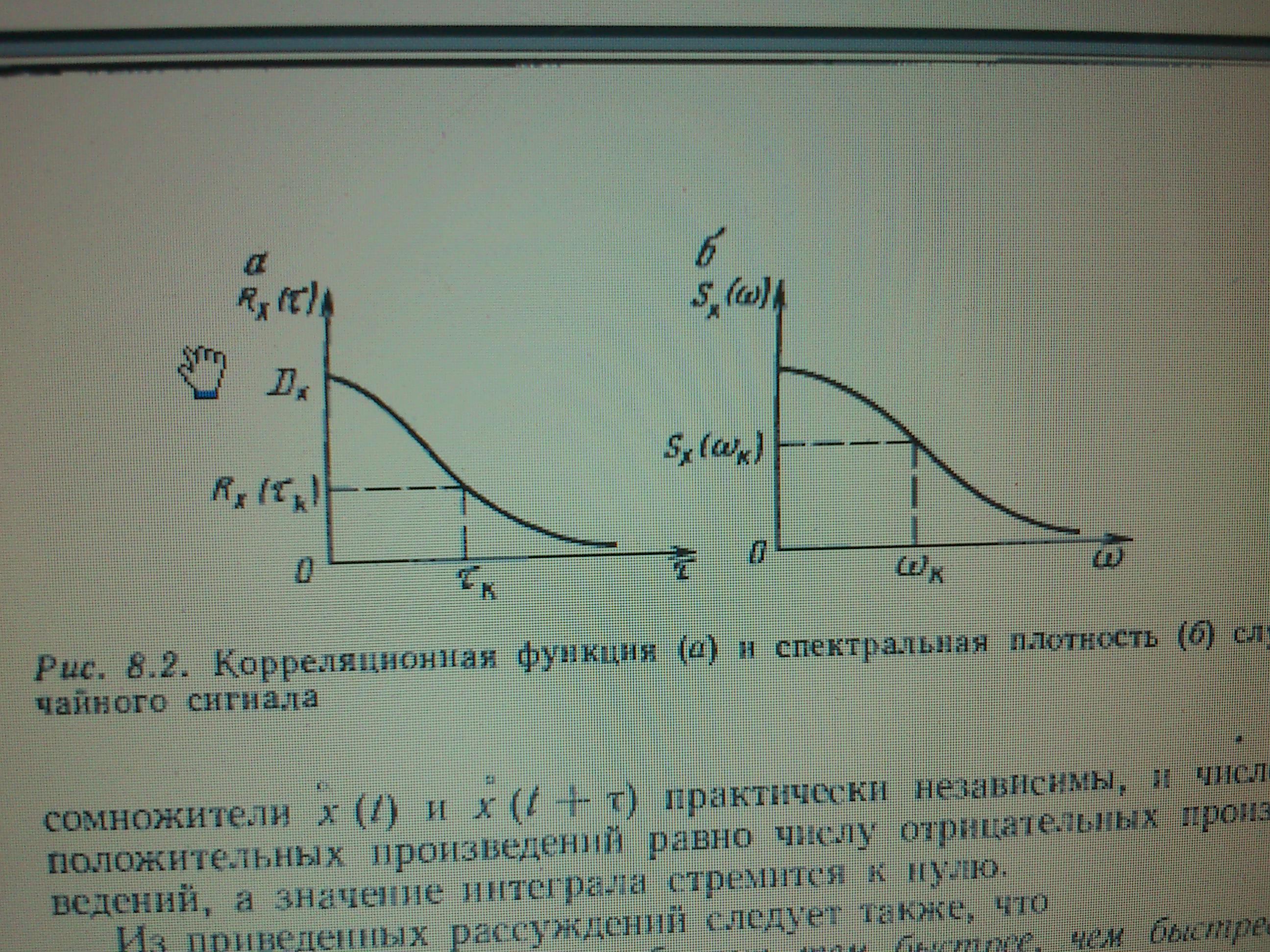
Интенсивность изменения случайного сигнала во времени можно охарактеризовать одной из двух функций – корреляционной или функцией спектральной плотности.
Корреляционной функцией случайного сигнала называется математическое ожидание произведений мгновенных значений центрированного сигнала, разделенных промежутком времени. Корреляционная (автокорреляционная) функция характеризует степень корреляции (тесноту связи) между предыдущими и последующими значениями сигнала.
Спектральная плотность случайного сигнала характеризует распределение квадратов относительных амплитуд гармоник сигнала вдоль оси w
-
Преобразование случайных сигналов линейными системами.
-
Идентификация систем.
-
Классификация задач оптимального управления.
-
Принцип максимума Понтрягина.
Необходимость
в принципе максимума Понтрягина возникает
в случае когда нигде в допустимом
диапазоне управляющей переменной
невозможно удовлетворить необходимому
условию. В этом случае согласно принципу
максимума Понтрягина величина оптимального
управления равна величине управления
на одном из концов допустимого диапазона.
Уравнения Понтрягина записываются при
помощи функции Гамильтона Н, определяемой
соотношением
![]()
-
Метод динамического программирования.
Динамическое программирование— способ решения сложных задач путём разбиения их на более простые подзадачи. Он применим к задачам с оптимальной подструктурой (англ.), выглядящим как набор перекрывающихся подзадач, сложность которых чуть меньше исходной. В этом случае время вычислений, по сравнению с «наивными» методами, можно значительно сократить.
Ключевая идея в динамическом программировании достаточно проста. Как правило, чтобы решить поставленную задачу, требуется решить отдельные части задачи (подзадачи), после чего объединить решения подзадач в одно общее решение. Часто многие из этих подзадач одинаковы. Подход динамического программирования состоит в том, чтобы решить каждую подзадачу только один раз, сократив тем самым количество вычислений. Это особенно полезно в случаях, когда число повторяющихся подзадач экспоненциально велико.