

2.3.1. Основное уравнение динамики материальной точки в декартовых и естественных координатах
Выражением основного закона механики и аксиомы параллелограмма сил (или принципа независимости действия сил) является основное уравнение динамики материальной точки :
![]() .(2.3.1)
.(2.3.1)
С учетом формул кинематики, это уравнение может быть представлено в виде:
![]() или
или
![]() .
(2.3.2)
.
(2.3.2)
Проецируя векторное уравнение (2.3.2) на оси инерциальной декартовой системы координат, получим уравнения динамики материальной точки в декартовых координатах
![]() .
(2.3.3)
.
(2.3.3)
Здесь
![]() ,
,![]() ,
,![]() - проекции ускорения
- проекции ускорения![]() точки на оси декартовой системы координат,
а
точки на оси декартовой системы координат,
а![]() - проекции равнодействующей
- проекции равнодействующей![]() на соответствующие оси.
на соответствующие оси.
Другую форму уравнений динамики точки
получим проектированием уравнения
(2.3.2) на естественные координатные оси:
![]() ,
(2.3.4)
,
(2.3.4)
где
![]() - проекции ускорения
- проекции ускорения![]() точки, а
точки, а![]() - проекции равнодействующей
- проекции равнодействующей![]() на соответствующие естественные оси.
на соответствующие естественные оси.
Отметим, что все уравнения динамики
точки, рассмотренные выше, справедливы
как для свободной, так и длянесвободнойточки. Во втором случае под равнодействующей![]() понимается сумма равнодействующих, какактивныхсил, так иреакцийсвязей (смотри тему 2.1 “Введение в
динамику и статику”).В отличие от
активных сил, реакции связей, как правило,
неизвестны.
понимается сумма равнодействующих, какактивныхсил, так иреакцийсвязей (смотри тему 2.1 “Введение в
динамику и статику”).В отличие от
активных сил, реакции связей, как правило,
неизвестны.
2.3.2. Две основные задачи динамики материальной точки
Среди множества задач, решаемых с помощью основного уравнения динамики точки, обычно выделяют задачи двух типов. К первому типу относится прямая задача: задано движение точки, найти силы, вызывающие (или сопровождающие) это движение. В этот разряд попадают, прежде всего, задачи динамики несвободной точки, в которой подлежат определению реакции связей. Второй тип составляютобратные задачи, в которых по заданным силам, приложенным к точке, требуется найти кинематические и геометрические характеристики её движения.
Решение прямой задачи достаточно
просто: по заданному (тем или иным
способом) движению точки находят её
ускорение![]() ,
подстановка которого в левую часть
уравнения (2.1.6) превращает его в векторное
линейное уравнение относительно искомых
сил. Решение прямой задачи в конечном
счёте приводит кпринципу Даламбера,
лежащему в основеметода кинетостатики.
,
подстановка которого в левую часть
уравнения (2.1.6) превращает его в векторное
линейное уравнение относительно искомых
сил. Решение прямой задачи в конечном
счёте приводит кпринципу Даламбера,
лежащему в основеметода кинетостатики.
В уравнении динамики несвободной точки, записанном в виде
![]() ,
(2.3.5)
,
(2.3.5)
где
![]() и
и![]() - равнодействующие приложенных к точке
активных сил и реакций связей, вектор
- равнодействующие приложенных к точке
активных сил и реакций связей, вектор![]() переносят в правую часть, а полученное
таким образом уравнение динамики точки
переносят в правую часть, а полученное
таким образом уравнение динамики точки![]() (2.3.6)
(2.3.6)
после введения обозначения
![]() ,
(2.3.7)
,
(2.3.7)
где вектор
![]() называют силой инерции материальной
точки, трактуется как уравнение статики
точки под действием сил
называют силой инерции материальной
точки, трактуется как уравнение статики
точки под действием сил![]() ,
,![]() и
и![]() ,
где
,
где![]() и
и![]() -
известные силы, а
-
известные силы, а![]() подлежит определению.
подлежит определению.
 Уравнение
Уравнение![]() (2.3.8)
(2.3.8)
называется уравнением кинетостатикиматериальной точки. Разумеется, ни о каком равновесии точки речь не может идти, поскольку сила инерции точки к ней не приложена. Как формальный приём подобный метод составления уравнения динамики оказывается весьма удобным.
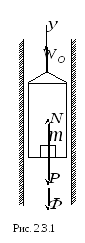
В качестве примера рассмотрим задачу.На полу лифта, поднимающегося вверх
с ускорением
![]() ,
находится груз массы m (рис.2.3.1). Каково
давление груза на пол лифта?
,
находится груз массы m (рис.2.3.1). Каково
давление груза на пол лифта?
Решение. К грузу приложены две
силы: вес![]() и реакция пола
и реакция пола![]() .
Добавим к ним силу инерции
.
Добавим к ним силу инерции![]() груза,
направленную противоположно ускорению
груза,
направленную противоположно ускорению
![]() ,
т.е. вниз. Величина
,
т.е. вниз. Величина![]() равна
равна![]() .
Уравнение кинетостатики для груза имеет
вид
.
Уравнение кинетостатики для груза имеет
вид
![]() . (а)
. (а)
Проектируем (а) на вертикальную осьy, получим
![]() , (b)
, (b)
откуда
![]() . (с)
. (с)
Искомое
давление равно и противоположно реакции
![]() .
.
Как
видно из выражения (с) оно превышает
вес![]() на величину
на величину![]() ,
обращающуюся в ноль при равномерном
подъёме лифта, когда
,
обращающуюся в ноль при равномерном
подъёме лифта, когда![]() .
Коэффициент
.
Коэффициент![]() называется в этом случае коэффициентом
динамичности.
называется в этом случае коэффициентом
динамичности.
Решение обратной задачи динамики более сложное. После подстановки в (2.1.6) выражений (или значений) заданных сил, получаем векторное дифференциальное уравнение, подлежащее интегрированию при заданных начальных условиях.
На практике уравнение (2.1.6) преобразуют к скалярной форме, проектируя его на декартовые
![]() ;
;![]() ;
;![]() (2.3.9)
(2.3.9)
или естественные оси
![]() ;
;![]() ;
;![]() .
(2.3.10)
.
(2.3.10)
Если действующие на точку силы расположены в одной плоскости, то в системе (2.3.9) останутся два первых уравнения, если же силы расположены вдоль одной прямой (в случае свободной точки), то составляют только одно уравнение, например первое.
Если же по условию задачи точка неподвижна, например, полностью закреплена неподвижными связями, то уравнения динамики (2.3.9) превращаются в уравнения статики точки
![]() ;
;![]() ;
;![]() .
(2.3.11)
.
(2.3.11)
Рассмотрим общий ход решения обратной задачи для случая прямолинейного движения точки.
Первый этап решения – составление
дифференциального уравнения дви-жения.
Прямая линия, вдоль которой движется
точка, принимается за ось x, направленную
в сторону её движения. Начало оси
помещается в начальное положение точки,
т.е. в положение приt=0, точка же
изображается на оси в текущем
положении (![]() ,
,![]() ,
,![]() ).
).
Далее к точке прилагают силы, причём силы сопротивления движению направляют противоположно скорости, а восстанавливающие силы (силы упругости) – к положению статического равновесия. В проекции на ось xосновное уравнение динамики точки приобретёт вид
![]() ,
где
,
где![]() .
(2.3.12)
.
(2.3.12)
Уравнение (2.3.12) является обыкновенным
дифференциальным уравнением второго
порядка. Его общее решение должно
содержать две константы интегрирования
![]() и
и![]() ,
т. е. имеет вид
,
т. е. имеет вид
![]() .
.
Константы определяют из начальных
условий:
![]() ,
где
,
где![]() начальное
положение точки,
начальное
положение точки,![]() её
начальная скорость. Для определения
её
начальная скорость. Для определения![]() и
и![]() имеем
два уравнения:
имеем
два уравнения:![]() ,
,
![]() .
.![]()