

1.2.2. Вращение твердого тела вокруг неподвижной оси
Вращением вокруг неподвижной осиназывается такое движение твердого тела, при котором какие-нибудь две фиксированные его точки остаются неподвижными. Прямая, проходящая через эти две точки, называется осью вращения тела (рис. 1.2.2).
Проведем через ось
![]() две полуплоскости: неподвижную
две полуплоскости: неподвижную![]() и подвижную
и подвижную![]() ,
неизменно связанную с вращающимся
телом. Угол
,
неизменно связанную с вращающимся
телом. Угол![]() между этими полуплоскостями называетсяуглом поворота тела. Будем
считать его положительным, если с
положительного конца оси
между этими полуплоскостями называетсяуглом поворота тела. Будем
считать его положительным, если с
положительного конца оси![]() видим поворот от полуплоскости
видим поворот от полуплоскости![]() до полуплоскости
до полуплоскости![]() против хода часовой стрелки и отрицательным
– по ходу часовой стрелки.
против хода часовой стрелки и отрицательным
– по ходу часовой стрелки.
Положение твердого тела с неподвижной
осью вполне определяется углом поворота
![]() .
При вращении тела угол
.
При вращении тела угол![]() изменяется, являясь функцией времени:
изменяется, являясь функцией времени:![]() .
(1.2.5)
.
(1.2.5)
Эта зависимость называется уравнением (или законом) вращения твердого тела вокруг неподвижной оси.
Угол
![]() измеряется врадианах.
измеряется врадианах.
Если угол поворота выражается числом
полных оборотов
![]() ,
то угол
,
то угол![]() в радианах равен
в радианах равен![]() .
(1.2.6)
.
(1.2.6)
Угловая скорость(или частота
вращения) вращающегося вокруг неподвижной
оси твердого тела характеризует быстроту
и направление вращения тела в данный
момент времени![]() .
.
Угловая скорость обозначается буквой
![]() и равна первой производной по времени
от угла поворота тела
и равна первой производной по времени
от угла поворота тела![]() .
(1.2.7)
.
(1.2.7)
Знак угловой скорости указывает
направление вращения тела: если тело
вращается в направлении против хода
часовой стрелки (наблюдая с положительного
конца оси
![]() )
– то значение
)
– то значение![]() положительно, если по ходу часовой
стрелки –отрицательно.
положительно, если по ходу часовой
стрелки –отрицательно.
Размерность угловой скорости будет:
![]() .Угловое ускорениевращающегося твердого тела характеризует
быстро-ту изменения угловой скорости
тела в данный момент времени.
.Угловое ускорениевращающегося твердого тела характеризует
быстро-ту изменения угловой скорости
тела в данный момент времени.
Угловое ускорение обозначается буквой
![]() и равно первой производной по времени
от угловой скорости, либо второй
производной по времени от угла поворота
и равно первой производной по времени
от угловой скорости, либо второй
производной по времени от угла поворота![]() .
(1.2.8)
.
(1.2.8)
Если знаки
![]() и
и![]() одинаковы, то тело вращается ускоренно,
если они противоположные – то замедленно.
одинаковы, то тело вращается ускоренно,
если они противоположные – то замедленно.
Размерность углового ускорения
тела
![]() .
.
Частные случаи равномерного и равнопеременного вращенийтвердого тела вокруг неподвижной оси изучаются самостоятельно (см. [1], с. 121,122).
1.2.3. Скорости и ускорения точек твердого тела, вращающегося вокруг неподвижной оси
При вращении тела вокруг неподвижной
оси все его точки описывают окружности,
плоскости которых перпендикулярны этой
оси, а центры лежат на ней. Рассмотрим
точку![]() тела (рис. 1.2.2), лежащую в полуплоскости
тела (рис. 1.2.2), лежащую в полуплоскости![]() и находящуюся от оси вращения
и находящуюся от оси вращения![]() на расстоянии
на расстоянии![]() ;
ее траектория – окружность радиуса
;
ее траектория – окружность радиуса![]() с центром
с центром![]() (рис. 1.2.3).
(рис. 1.2.3).
П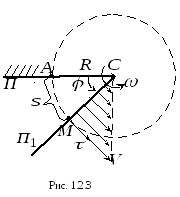 рименим
естественный способ задания движения
точки. За начало отсчета дуговой
координаты
рименим
естественный способ задания движения
точки. За начало отсчета дуговой
координаты![]() выберем точку
выберем точку![]() ,
лежащую в неподвижной полуплоскости
,
лежащую в неподвижной полуплоскости![]() .
Положительное направление отсчета
.
Положительное направление отсчета![]() соответствует положительному направлению
отсчета угла поворота
соответствует положительному направлению
отсчета угла поворота
![]() .
.
Положение точки
![]() в дан-ный момент времени
в дан-ный момент времени![]() определяет-ся соотношением
определяет-ся соотношением
![]() ,
где значение
,
где значение![]() выражено в радианах.
выражено в радианах.
Итак, уравнение движения точки
![]() по траектории имеет вид:
по траектории имеет вид:![]() .
(1.2.9)
.
(1.2.9)
Скорость точки М получается путем дифференцирования (1.2.9) по времени
![]() .
(1.2.10)
.
(1.2.10)
Вектор скорости
![]() направлен в сторону вращения тела по
касательной к окружности и, следовательно,перпендикулярен к радиусу
направлен в сторону вращения тела по
касательной к окружности и, следовательно,перпендикулярен к радиусу
![]() описываемой окружности (рис.1.2.3).
описываемой окружности (рис.1.2.3).
Модуль скорости точки
![]() равен
равен
![]() .
(1.2.11)
.
(1.2.11)
Для любого момента времени
![]() скорости
точек вращающегося тела пропорциональны
их расстоянию до оси вращения.
скорости
точек вращающегося тела пропорциональны
их расстоянию до оси вращения.
Эпюра векторов скоростей точек, лежащих
на радиусе
![]() представлена на рис. 1.2.3.
представлена на рис. 1.2.3.
Проекция ускорения точки
![]() на касательную в соответствии с (1.1.27)
на касательную в соответствии с (1.1.27)
![]() .
(1.2.12)
.
(1.2.12)
Модуль касательного ускорения равен:
![]() .
(1.2.13)
.
(1.2.13)
Величина нормального ускорения точки
![]() равна
равна
![]() ;
но
;
но
![]() ,
следовательно, имеем:
,
следовательно, имеем:
![]() .
(1.2.14)
.
(1.2.14)
Взаимное расположение векторов
![]() и
и![]() показано на рис. 1.2.4.
показано на рис. 1.2.4.
Касательное ускорение ![]() точки
точки![]() направлено по касательной в сторону
вращения тела (рис. 1.2.4,а), если вращениеускоренное, и в сторону, противоположную
вращению тела, (рис. 1.2.4,б), если вращениезамедленное.
направлено по касательной в сторону
вращения тела (рис. 1.2.4,а), если вращениеускоренное, и в сторону, противоположную
вращению тела, (рис. 1.2.4,б), если вращениезамедленное.
Нормальное ускорение![]() точки
точки![]() всегда направлено от точки
всегда направлено от точки![]() к оси вращения тела (к центру
к оси вращения тела (к центру![]() описываемой точкой окружности).
описываемой точкой окружности).
Модули ускорений
![]() и
и![]() пропорциональны расстояниям точек
вращающегося тела до оси вращения.
пропорциональны расстояниям точек
вращающегося тела до оси вращения.
Полное ускорение точки
![]() равно
равно
![]() ,
а его модуль равен:
,
а его модуль равен:
![]() . (1.2.15)
. (1.2.15)
Направление вектора полного ускорения
точки
![]() определяется углом
определяется углом![]() ,
образуемым вектором
,
образуемым вектором![]() с радиусом
с радиусом![]() .
Из рисунка 1.2.4 видно, что:
.
Из рисунка 1.2.4 видно, что:![]() .
(1.2.16)
.
(1.2.16)
В частном случае равномерного вращениятела имеем:
![]() ,
,![]() .
.
И, следовательно, полное ускорение равно нормальному ускорению.