

Раздел 1. Кинематика
1.1. Кинематика точки
|
В ходе изучения темы Вам предстоит усвоить следующие геометрические и кинематические характеристики движения точки:
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
|
|
15.
16.
Следует научиться применять указанные формулы при решении задач по кинематике точки
|
Кинематика– раздел теоретической механики, в котором механическое движение материальных тел изучается с геометрической и временной точки зрения и связь между движением тел и силами не рассматривается.
Кинематика является введением в динамику. Но она имеет и самостоя-тельное значение как теоретическая основа кинематического исследования механизмов и машин. В курсе теоретической механики изучаются кинематика точки и кинематика абсолютно твердого тела.
1.1.1. Способы задания движения точки
О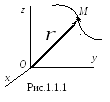 сновной
задачей кинематики точкиявляется
определение кинемати-ческих характеристик
ее движения: траектории, т. е. линии,
описываемой точ-кой в пространстве,
скорости и ускорения. Но для этого
необходимо задать дви-жение точки, то
есть уметь определять ее положение
относительно выбраннойсистемы отсчетав любой момент времени. Существуют три
способа задания движения точки:векторный,
координатный и естественный.
сновной
задачей кинематики точкиявляется
определение кинемати-ческих характеристик
ее движения: траектории, т. е. линии,
описываемой точ-кой в пространстве,
скорости и ускорения. Но для этого
необходимо задать дви-жение точки, то
есть уметь определять ее положение
относительно выбраннойсистемы отсчетав любой момент времени. Существуют три
способа задания движения точки:векторный,
координатный и естественный.
При векторном способе положение
и движение точки в пространстве определяют
радиус-вектором![]() ,
соединяющего движущуюся точку
,
соединяющего движущуюся точку![]() (рис. 1.1.1) с неподвижным центром О.
При движе-нии точки радиус-вектор
(рис. 1.1.1) с неподвижным центром О.
При движе-нии точки радиус-вектор![]() в общем случае изме-няется по модулю и
направлению, т. е. является векторной
функцией времени
в общем случае изме-няется по модулю и
направлению, т. е. является векторной
функцией времени
![]() .
(1.1.1)
.
(1.1.1)
Уравнение (1.1.1) называется уравнением(или законом)движения точки в
векторной форме.Геометрическое
место точек концов радиус-вектора![]() называетсятраекториейдвижения
илигодографом радиус-вектора точкиМ.
называетсятраекториейдвижения
илигодографом радиус-вектора точкиМ.
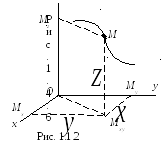
При координатном способес
точкой отсчёта связывают, обычно,
прямоугольные координатные осиx,y,z.
Положение точки![]() в пространстве определяют по её проекциям
на эти оси. На рисунке 1.1.2 в некоторый
момент времениt
изображено положение движущейся
точкиМи её проекции Mx,
My, Mz на
координатные оси. ОтрезкиOMx
, OMy , OMz –
координаты точки, то есть
OMx= x,
OMy=y,OMz=
z.
в пространстве определяют по её проекциям
на эти оси. На рисунке 1.1.2 в некоторый
момент времениt
изображено положение движущейся
точкиМи её проекции Mx,
My, Mz на
координатные оси. ОтрезкиOMx
, OMy , OMz –
координаты точки, то есть
OMx= x,
OMy=y,OMz=
z.
При движении точки ее координаты – непрерывные функции времени:
![]() .
(1.1.2)
.
(1.1.2)
 Если
точка движется в одной плоскости,
например в плоскости
Если
точка движется в одной плоскости,
например в плоскости ![]() ,
то будем иметь два уравнения движения:
,
то будем иметь два уравнения движения:
![]() .
(1.1.3)
.
(1.1.3)
Прямолинейное движение точки определяется одним уравнением:
![]() .
(1.1.4)
.
(1.1.4)
Уравнения (1.1.2), (1.1.3), можно рассматривать
как параметрические уравнения траектории(параметр – время![]() ).
Чтобы получить уравнение траектории
точки в виде зависимости между её
координатами, нужно исключить из
уравнений движения (1.1.2), (1.1.3) параметр
).
Чтобы получить уравнение траектории
точки в виде зависимости между её
координатами, нужно исключить из
уравнений движения (1.1.2), (1.1.3) параметр![]() .
.
Уравнения(1.1.2), (1.1.3), (1.1.4) вполне определяют
положение точки в любой момент
![]() и поэтому называютсяуравнениями
движения точки в декартовых
координатах.
и поэтому называютсяуравнениями
движения точки в декартовых
координатах.
 Естественный способ. Этот
способ применим в тех случаях, когда
траекто-рия и закон движения по ней
точкиза-ранее известны.Траектория
рассматри-вается как криволинейная
координатная ось.Положение
точки
Естественный способ. Этот
способ применим в тех случаях, когда
траекто-рия и закон движения по ней
точкиза-ранее известны.Траектория
рассматри-вается как криволинейная
координатная ось.Положение
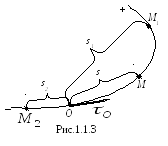
точки ![]() на траектории определяется дуговой
(криволинейной) координатой
на траектории определяется дуговой
(криволинейной) координатой ![]() ,
отсчитываемой от неко-торой неподвижной
точки
,
отсчитываемой от неко-торой неподвижной
точки ![]() ,
выбран-ной за начало отсчета (рис.1.1.3).
,
выбран-ной за начало отсчета (рис.1.1.3).
Положительное направление отсчета
координаты
![]() устанавливают как на обычной, т. е.
прямолинейной, координатной оси, или
ортом
устанавливают как на обычной, т. е.
прямолинейной, координатной оси, или
ортом![]() ,
называемым ортом касательной. При
движении точки ее дуговая координата
есть функция времени:
,
называемым ортом касательной. При
движении точки ее дуговая координата
есть функция времени:
![]() .
(1.1.5)
.
(1.1.5)
Зависимость (1.1.5) называется уравнениемилизаконом движения точки по
траектории.Не следует
отождествлять дуговую координату![]() спутем
спутем![]() ,
пройденным точкой по траектории.
Пройденный путь - величина арифметиче-ская,
т.е. существенно положительная: при
движении точки путь непрерывно возрастает,
естественная или дуговая координата –
величина алгебраическая. На рисунке
1.1.3 путь, пройденный точкой при её
движении из точкиО в положение
М1 и затем изМ1 вМ2 равен:
,
пройденным точкой по траектории.
Пройденный путь - величина арифметиче-ская,
т.е. существенно положительная: при
движении точки путь непрерывно возрастает,
естественная или дуговая координата –
величина алгебраическая. На рисунке
1.1.3 путь, пройденный точкой при её
движении из точкиО в положение
М1 и затем изМ1 вМ2 равен:
![]() тогда как естественная
координата точки М
в положении
тогда как естественная
координата точки М
в положении ![]() :
:
![]() .
.
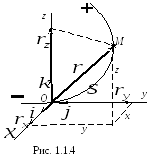 На рисунке 1.1.4 изображены все три
способа задания движения точки.
Радиус-вектор
На рисунке 1.1.4 изображены все три
способа задания движения точки.
Радиус-вектор![]() точкиМ разложен по осям координат на
составляющие
точкиМ разложен по осям координат на
составляющие![]() :
:
![]() . (1.1.6)
. (1.1.6)
Поскольку:
![]() ,
,![]() и
и![]() ,
то используя орты
,
то используя орты![]() осей
координат, равенство (1.1.6) примет вид
осей
координат, равенство (1.1.6) примет вид
![]() .
(1.1.7)
.
(1.1.7)
Соотношение (1.1.7) выражает связь
между векторным и координатным способами
задания движения точки. Положение
точки М определяется
также дуговой координатой ![]() ,
поэтому
,
поэтому ![]() .
.