

3.Принцип оптимальності. Рівняння Беллмана
Принцип оптимальності
У техніці існує великий клас об'єктів і процесів, керування якими здійснюється на основі обмеженого числа рішень, прийнятих послідовно в деякі фіксовані моменти часу.
Визначення закону керування для таких процесів пов'язане з рішенням так званої задачі багатокрокового вибору. Керування дискретними системами може бути прикладом таких багатокрокових процесів.
Кожний безперервний процес можна представити як багатокроковий, якщо розглядати його в дискретні моменти часу. Підхід, що дозволяє знайти оптимальне рішення на основі багатокрокових процесів ухвалення рішення, одержав назву динамічного програмування.
В основі методу динамічного програмування лежить принцип оптимальності, сформульований Беллманом Р.
Оптимальна стратегія визначається лише станом системи в даний момент і не залежить від того, як система прийшла в дану точку (рис.3.1).
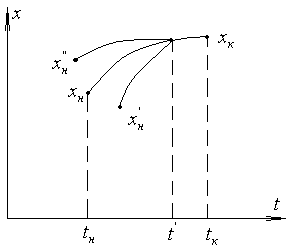
Рис. 3.1.
Під стратегією ми розуміємо правило прийняття рішень.
Принцип оптимальності може бути сформульований і по-іншому.
Якщо
траєкторія системи оптимальна на
відрізку часу
![]() ,
то кінцева ділянка цієї траєкторії на
відрізку
,
то кінцева ділянка цієї траєкторії на
відрізку![]() у свою чергу є оптимальною траєкторією,
де
у свою чергу є оптимальною траєкторією,
де![]()
довільний момент часу (рис.3.10).
довільний момент часу (рис.3.10).
Із принципу оптимальності можна одержати необхідні умови оптимальності для безперервних і дискретних систем.
Безперервні системи. Рівняння Беллмана
Об'єкт описується рівнянням
![]()
Визначити
керування
![]() і траєкторію
і траєкторію![]() , що доставляють екстремум функціоналу
, що доставляють екстремум функціоналу
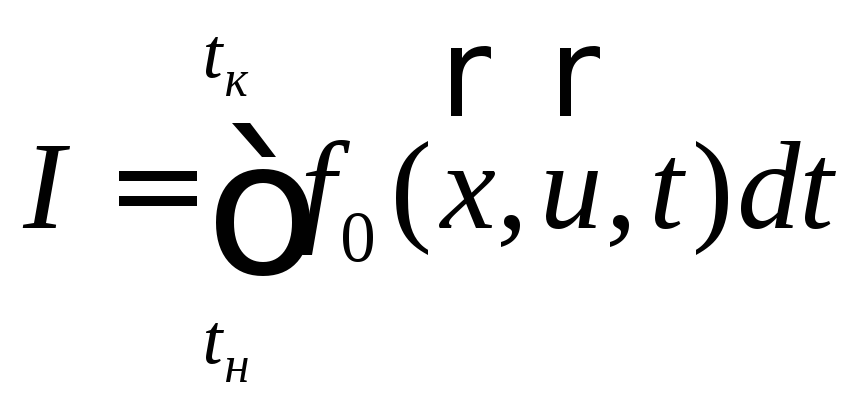
де
![]() фіксовано,
фіксовано,
![]() відкрита
область.
відкрита
область.
Нехай
відома оптимальна траєкторія
![]() , рис3.2. Розглянемо ділянку
, рис3.2. Розглянемо ділянку![]() .
.
Відповідно до принципу оптимальності функціонал (3.2) досягає на ньому мінімум.
Введемо позначення
![]()

Рис. 3.2.
При
певному керуванні мінімальне значення
функціонала залежить тільки від
![]() і
і![]() .
.
Функція
![]() називається функцією Беллмана.
називається функцією Беллмана.
Розглянемо
дві близькі точки оптимальної траєкторії
![]() й
й![]() .
.
Точка
![]() перебуває ближче до кінцевого стану.
Тому, дотримуючись принципу оптимальності,
ділянка траєкторії від
перебуває ближче до кінцевого стану.
Тому, дотримуючись принципу оптимальності,
ділянка траєкторії від![]() до
до![]() вже оптимальна.
вже оптимальна.

Відповідно до теореми про середнє можна записати
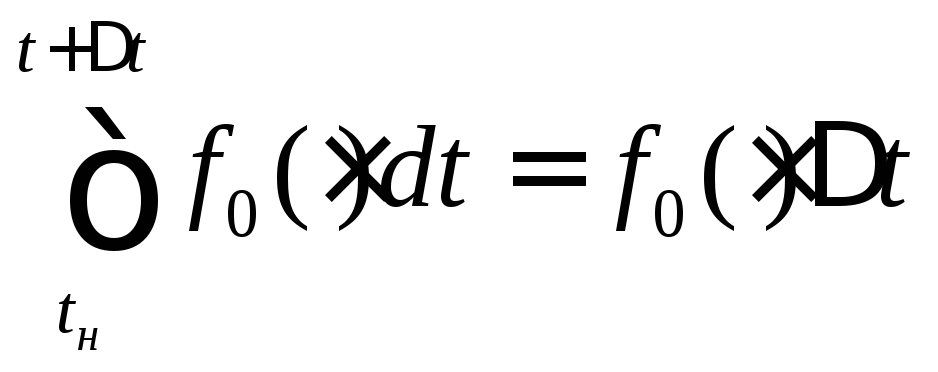
У такий спосіб
![]()
Приймемо
допущення, що функція
![]() має частинні похідні по всіх координатах
має частинні похідні по всіх координатах![]() і за часом
і за часом![]() .
.
Тоді,
розклавши ![]() в
ряд Тейлора, одержимо
в
ряд Тейлора, одержимо
![]()
Згідно (3.1), запишемо
![]()
Тоді (3.7) приймає наступний вид
![]()
Підставимо
(3.8) в (3.6)
![]() і одержимо
і одержимо

Беручи
до уваги, що
![]() і
і![]() не залежать від
не залежать від![]() ,
(3.9) можна перетворити до виду
,
(3.9) можна перетворити до виду

У результаті одержуємо

Або у векторній формі
![]()
Це
рівняння в частинних похідних, називається
рівнянням Беллмана. Рівняння Беллмана
аналітичний вираз принципу оптимальності
для безперервних процесів. Він
обґрунтований лише за умови, що існують
частинні похідні функції
![]() по всіх координатах
по всіх координатах![]() і часу
і часу![]() .
Випадки, коли це допущення не виконується,
зустрічаються досить часто. Наприклад,
допущення не виконується для лінійних
систем у точках, що належить лінії
(поверхні) перемикання.
.
Випадки, коли це допущення не виконується,
зустрічаються досить часто. Наприклад,
допущення не виконується для лінійних
систем у точках, що належить лінії
(поверхні) перемикання.
За допомогою рівняння (3.11) можуть бути отримані оптимальні керування й траєкторії. Однак процедура аналітичного рішення рівняння в частинних похідних, ускладненого умовою мінімуму, представляє більші труднощі.