

Б) Операції над лінійними перетвореннями
Сумою
двох лінійних перетворень А
та ℬ
називається таке перетворення А+В,
при якому
![]()
Властивості:
А+В = В+А.
(А+В)+С = А+(В+С).
А+ Ơ = А.
Добутком
лінійного перетворення А
на число α
називається таке теж лінійне перетворення
αА,
при якому
![]()
Властивості:
1·А = А.
α(βА)=(αβ)А.
(α+β)А=αА+βА.
α(А+В)=αА+αВ.
Добутком
лінійних перетворень А
та
В
називається таке теж лінійне перетворення
АВ,
при якому
![]()
Властивості:
(АВ)ℂ=А(Вℂ).
Аℰ=А.
(А+В)ℂ=Аℂ+Вℂ.
ℂ(А+В)=ℂА+ℂВ.
Для кожного невиродженого лінійного перетворення А існує таке (обернене до А) лінійне перетворення А-1, що
А∙А-1=А-1·А=ℰ.
Ясно, що добуток невироджених лінійних перетворень теж є невиродженим лінійним перетворенням.
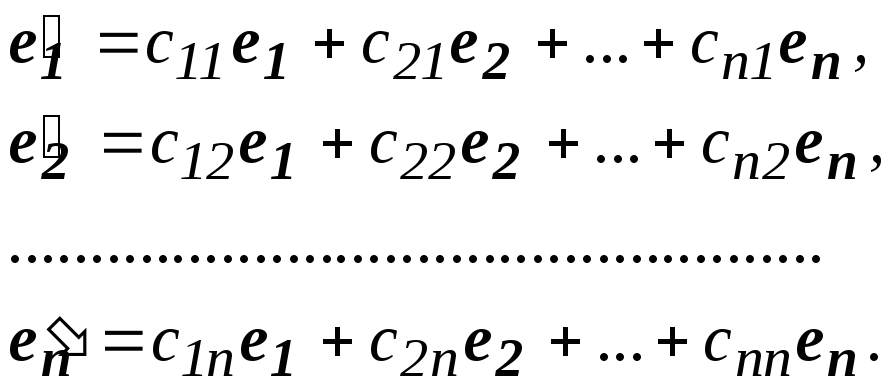
В) Перехід до нового базису
Нехай
лінійне перетворення А
в базисі е=(е1,е2,…,еп)
має матрицю А,
а в базисі
![]() -
матрицю
-
матрицю
![]() .
Знайдемо зв’язок між ними.
.
Знайдемо зв’язок між ними.
Позначимо
через С
матрицю переходу від базису е
до базису
![]() .
Тоді
.
Тоді
Будемо матрицю С розглядати як матрицю лінійного перетворення ℂ в базисі е. Тоді

Значить,
лінійне перетворення ℂ
переводить вектори базису е
у вектори базису
![]() .
Відомо, що визначник матриці С відмінний
від нуля, значить, дляℂ
існує обернене перетворення ℂ
-1,
при якому
.
Відомо, що визначник матриці С відмінний
від нуля, значить, дляℂ
існує обернене перетворення ℂ
-1,
при якому

За умовою,
![]() .
.
Застосуємо до обох частин цієї рівності перетворення ℂ -1:
![]() .
.
Підставимо
в ліву частину
![]() :
:
![]() ,
,
тобто
матрицею перетворення
![]() в базисіе
є
матриця
в базисіе
є
матриця
![]() Але, з другого боку матриця цього
перетворення рівна добутку матриць
відповідних перетворень в базисіе,
тобто
Але, з другого боку матриця цього
перетворення рівна добутку матриць
відповідних перетворень в базисіе,
тобто
![]() .
.
Ясно, що визначник матриці лінійного перетворення не залежить від базису:
![]()
Приклад.
В базисі е1,е2 перетворення А має матрицю
![]()
Написати
матрицю цього перетворення в базисі
![]()
Розв’язування.
Матриця
переходу
![]() Тоді
Тоді![]() Звідси
Звідси
![]()
Г) Ранг і дефект лінійного перетворення
Сукупність
всеможливих векторів вигляду Ах,
де
![]() ,
називаєтьсяобластю
значень
або образом
лінійного перетворення А.
Позначається ImА.
,
називаєтьсяобластю
значень
або образом
лінійного перетворення А.
Позначається ImА.
Сукупність
всеможливих векторів
![]() ,
для якихАх=0,
називається ядром
лінійного перетворення А.
Позначається KerА.
,
для якихАх=0,
називається ядром
лінійного перетворення А.
Позначається KerА.
І образ, і ядро лінійного перетворення А є підпростором в V.
а)
Якщо
![]() тох=Ах1,
у=Ау1,
де
тох=Ах1,
у=Ау1,
де
![]() тох+у=Ах1+Ау1=А(х1+у1),
де
тох+у=Ах1+Ау1=А(х1+у1),
де
![]() і, значить,
і, значить,![]() .
.
αх=αАх1=А(αх1),
де
![]() і, значить,
і, значить,![]() .
.
Отже, ImА – підпростір простору V.
б)
Якщо
![]() ,
тобто якщоАх=0
і Ау=0,
то і
,
тобто якщоАх=0
і Ау=0,
то і
А(х+у)= Ах+Ау=0+0=0 і
А(αх)=αАх=α·0=0,
тобто
![]() і
і![]()
Отже, KerА – підпростір простору V.
Розмірність образу перетворення А dim(ImА) співпадає з рангом матриці А цього перетворення і називається рангом перетворення А. Дійсно, підпростір ImА породжується векторами Ае1, Ае2,..., Аеп, де е={e1, e2,…,en} – довільний базис простору V і, значить, розмірність ImА дорівнює максимальній кількості лінійно незалежних стовпчиків матриці А.
Розмірність ядра dim(KerА) називається дефектом лінійного перетворення А.
Важливим є твердження, що сума рангу і дефекту лінійного перетворення А дорівнює розмірності п простору V. Тобто,
dim(ImА)+dim(KerА)=n.
Д) Інваріантні підпростори
Нехай V1 – підпростір векторного простору V, А – деяке лінійне перетворення простору V. Образ Ах вектора х із V1 не обов’язково належить V1.
Розглянемо такі підпростори, вектори яких не виводяться із них перетворенням А.
Підпростір V1 простору V називається інваріантним відносно лінійного перетворення А, якщо образ Ах кожного вектора х із V1 належить V1.
Приклади.
Для лінійного перетворення А – повороту навколо осі Оz звичайного тривимірного простору - інваріантними підпросторами будуть, наприклад, площина хОу і вісь Оz.
Для лінійного перетворення А – ортогонального проектування того ж простору на площину хОу - інваріантними підпросторами будуть: площина хОу; всі площини, що проходять через вісь Оz; сама вісь Оz; всі прямі площини хОу, що проходять через початок координат.
В довільному просторі кожний підпростір інваріантний відносно тотожнього і нульового перетворень.
В довільному просторі при довільному лінійному перетворенні сам простір і його підпростір, що складається із одного нульового вектора, є інваріантними.
Теорема 1. Перетин і сума підпросторів, інваріантних відносно лінійного оператора А, інваріантні відносно А.
Доведення.
а)
Якщо підпростори V1
і V2
інваріантні відносно А
і
![]() ,
то
,
то
![]() і
і
![]() ,
значить,
,
значить,
![]() і
і
![]() ,
тобто
,
тобто
![]() .
.
б)
Якщо
![]() ,
тоx=v1+v2,
де
,
тоx=v1+v2,
де
![]() ,
,![]() .
Тоді
.
Тоді![]() і
і![]() ,
звідкиАх=Аv1+Аv2
,
звідкиАх=Аv1+Аv2![]() ▲
▲
Теорема 2. Якщо А – невироджене лінійне перетворення і V1 – підпростір, інваріантний відносно А, то V1 інваріантний і відносно А-1.
Доведення.
Нехай е1, е2, …, еr – базис підпростору V1. Тоді вектори
Ае1,
Ае2,
…,
Аеr,
які із інваріантності V1
теж належать V1,
теж лінійно незалежні і, значить, теж
утворюють базис V1,
тобто довільний вектор
![]() можна через цей базис виразити:
можна через цей базис виразити:
![]()