

Посібник
.pdfПечі живляться напругою промислової частоти або від напівпровідникових перетворювачів частоти, а для отримання високих частот застосовують лампові генератори (для установок поверхневого нагрівання та плавлення кольорових металів).
Крім канальних печей існують тигельні печі, де метал плавиться у спеціальній посудині – тиглі, розташованому всередині котушки індуктора.
3.1.4. Установки електричного зварювання
До установок електричного зварювання належать установки електродугового та контактного зварювання. Зварюванням називають спосіб з’єднання металевих деталей, які розігріваються до рідкого стану у місці з’єднання і стають нероз’ємними після застигання розтопленого металу.
Електродугове зварювання – це спосіб отримання нероз’ємного з’єднання деталей, за якого деталі у місці майбутнього з’єднання розплавляють тепловою енергією електричної дуги. Дуга горить між двома електродами, одним з яких є деталі, а другим – спеціальний електрод, що розплавляється і заповнює зварювальний шов. Дуга виникає за значення напруги 50 – 80 В, яка у робочому режимі зменшується до 25 – 30 В. Для живлення електричної дуги використовують зварювальні трансформатори змінного струму промислової частоти, спеціальні зварювальні генератори, зварювальні агрегати та перетворювачі. На рис. 3.3 наведена принципова схема зварювання змінним струмом промислової частоти.
Для функціонування зварювальних установок необхідно створити бажану вольт-амперну характеристику джерела живлення дуги. В установці, що зображена на рис.3.3, бажаний хід зовнішньої характеристики формується зміною положення рухомої частини магнітопровода - вбудованого дроселя.
|
Вбудований |
|
|
дросель |
|
FV |
|
|
QS |
|
Електрод |
|
|
Зварювані |
|
Tрансформатор |
деталі |
|
|
|
Рис. 3.3. Принципова схема зварювання від |
||
трансформатора з влаштованим дроселем |
||
FСТ I T 1 
2 3 |
FСТ
Рис. 3.4. Принципова схема контактного зварювання
51
Електрозварювальні установки змінного струму у системі електропостачання викликають подібні проблеми як дугові печі, зокрема спотворення форми кривої струму, різко змінне навантаження для мережі, низький коефіцієнт потужності тощо.
Останнім часом широко застосовується зварювання постійним струмом з живленням дуги зварювання через спеціальні випрямлячі. Це дозволяє підвищити якість зварювання, економити енергію внаслідок зменшення її втрат в регулювальному пристрої живлення, а також забезпечити симетричне трифазне навантаження електромережі з високим коефіцієнтом потужності.
Контактним електричним зварюванням називається спосіб отримання нероз’ємного з’єднання металевих деталей з розплавленням металу теплом, що виділяється у місці їх контакту деталей під час проходження електричного струму (рис. 3.4). За принципом роботи установки контактного зварювання можна віднести до установок прямого резистивного нагрівання. Розрізняють точкове, стикове, шовне контактне зварювання.
Кількість тепла, що виділяється у зварюваних деталях визначається за формулою
Q= I2 · τ ·(RK+RД),
де І – струм, що проходить через деталі; τ – тривалість проходження струму; RK, RД – відповідно опір у місці контакту деталей та власне деталей.
Теплова енергія зварювання концентрується у місці контакту, бо перехідний опір контакту RK значно більший від опору RД деталей. Для отримання надійного контакту деталі попередньо стискають. У деяких установках після розплавлення стискаюче зусилля FCT збільшують з метою посилення взаємопроникнення молекул металу з’єднуваних деталей. На підставі цього контактне зварювання називають також зварюванням тиском.
3.1.5. Електролізні установки
Електроліз набув поширення у металургії кольорових металів та у деяких інших виробничих процесах. Такі метали, як алюміній, цинк, магній добувають переважно електролізом. Електроліз використовується для очищення (рафінування) міді, нікелю, свинцю, а також для отримання деяких газів - хлору, водню, кисню тощо. Суть електролізу полягає у виділенні частинок речовини на електродах, занурених в електроліт, під час проходження у ньому електричного струму. Цей процес називається електроекстракцією. Якщо ж метал з одного електрода через електроліт переноситься на інший, то цей процес називається рафінуванням. Електролітами є розчини чи розплави солей певних речовин. Електроліт має іонну провідність, тобто струм утворюють рухомі заряджені частинки
– іони. У процесі електролізу електрична енергія перетворюється у хімічну.
52
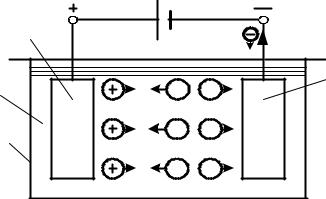
На рис. 3.5 зображена принципова схема електролізної ванни де здійснюється електролітичний процес рафінування. Метал Ме з електрода 3 через електроліт переноситься на електрод 4 під дією постійного електричного струму. Електроліз відбувається у електролітичній ванні 1, наповненій електролітом 2. Для живлення електролітичних ванн сьогодні переважно використовують випрямлячі.
Електроліз – основа гальванотехніки: гальваностегії та гальванопластики. Гальваностегія – спосіб нанесення тонких металевих покрить на матеріали методом електролізу. Таким покриттям захищають метали від корозії (хромування, нікелювання, міднення), покращують їх декоративний вигляд, виготовляють друковані плати тощо.
|
|
Е |
|
|
|
|
3 |
|
|
е |
І |
|
|
|
|
||
2 |
|
ОН |
Н |
|
4 |
|
|
Ме |
|
|
|
|
Ме |
|
|
Ме |
|
|
|
|
|
||
1 |
|
ОН |
Н |
|
|
|
|
Ме |
|
|
|
|
|
ОН |
Н |
|
|
|
|
Ме |
|
|
|
Рис. 3.5. Принципова схема електролізної ванни |
|||||
Гальванопластика – спосіб отримання металевих копій з виробів. Копійована деталь - матриця в електролізному процесі стає електродом, на який осідає метал з електроліту. Матриці можуть бути металевими і неметалевими. В останньому випадку на їх поверхню спочатку наносять електропровідне покриття. Методом гальванопластики можна отримати копії статуй, бюстів інших складних за формою деталей.
Електролізні установки живляться від перетворювачів змінного струму у постійний. Вони зумовлюють протікання електропостачальній мережу вищих гармонічних складових струму, тому їх оснащують фільтрокомпенсувальними пристроями.
Під час проектування та експлуатації високоефективних систем електропостачання необхідно якомога повніше враховувати характеристики й особливості різних груп електроприймачів та споживачів.
3.2. Використання електроенергії для електропривода механізмів
Найпоширенішими і складними електроприймачами є системи електропривода (електроурухомлення). Установки електропривода перетворюють електричну енергію у механічну і призначені для надання руху виконавчим механізмам за допомогою електричних машин
53
(електродвигунів) змінного і постійного струму. У сучасних електроприводах можна використовувати електричні машини потужністю від часток вата до десятків мегават, які часто живляться від мережі змінного струму через керовані перетворювачі (перетворювачі частоти змінного струму або перетворювачі змінного струму у постійний). Електричні машини застосовують для надання обертового чи лінійного руху деталям верстатів для оброблення дерева, металів чи інших матеріалів (токарні, свердлильні, шліфувальні, фугувальні тощо ), для переміщення вантажів на відстань (транспортери, лебідки, шнекові механізми, конвеєри тощо), для урухомлення підіймально-транспортних механізмів (підіймальні крани, ліфти), для урухомлення електричного транспорту (трамваїв, тролейбусів, електропоїздів наземного та підземного транспорту), для забезпечення роботи вентиляторів, помп, компресорів, а також побутових механізмів (фенів, кухонних комбайнів, електробритв тощо). У цих механічних пристроях окремі їх частини можуть здійснювати обертовий чи лінійний рух.
Залежно від характеру виробничих і загальнопромислових механізмів електропривід може працювати в тривалому, короткочасному, повторнокороткочасному або складніших, часто нерегулярних режимах. Запуск, реверс (зміна напрямку обертання), динамічне гальмування, різка зміна навантаження (наприклад, під час роботи вальцювальних машин) та інші перехідні явища у механізмах електричного приводу можуть супроводжуватися поштовхами струму в електропостачальних системах, що істотно ускладнює їх роботу.
Електродвигуни для урухомлення підбирають, враховуючи такі умови:
-механічні характеристики двигуна повинні відповідати вимогам виробничого механізму;
-потужність двигуна у процесі роботи повинна використовуватися якнайповніше;
-параметри двигуна (напруга і частота струму) повинні відповідати параметрам мережі;
-конструктивне виконання двигуна повинно відповідати умовам його експлуатації (вологість, температура, вибухобезпечність і т.п.);
-двигун повинен бути зручним у використанні та безпечним для обслуговуючого персоналу.
У більшості електроприводів застосовують асинхронні двигуни, які мають просту конструкцію і зручні в експлуатації.
3.2.1. Електропривід асинхронним двигуном
Асинхронний двигун складається з двох основних частин: нерухомої – статора та рухомої – ротора. Статор і ротор виготовляють з листів електротехнічної сталі товщиною 0,5 мм. У спеціальних пазах (гарах),
54
виконаних вздовж твірних внутрішньої поверхні статора та зовнішньої поверхні ротора, укладають відповідно обмотки статора і ротора. Осердя статора закріплюють у станині, встановленій на фундаменті. Феромагнітне осердя ротора монтують на осі (валу). Кінці вала опираються на підшипники (вальниці) кочення, які вмонтовані у щити, а щити прикріплюють до станини. Асинхронні двигуни бувають з фазним ротором та короткозамкненим ротором. У електродвигуні з короткозамкненим ротором пази (гари) осердя ротора заливають розтопленим алюмінієм, а початки та кінці утворених у пазах стрижнів відповідно сполучають кільцями так, що вони утворюють подобу клітки для білки. Двигуни з фазним ротором мають трифазну обмотку ротора, кінці якої сполучені між собою, а початки виведені на контактні кільця, закріплені на валу ротора. Кільця ізольовані від вала та між собою, обертаються разом з валом та з’єднані з зовнішнім колом через контактні щітки. У зовнішнє коло ротора вмикають реостати (додаткові резистори). Обмотка статора складається з трьох фазних обмоток, геометричні осі яких зсунуті між собою на 1200. Після увімкнення фаз обмоток до відповідних фаз трифазної мережі живлення, у просторі машини утворюється обертове магнітне поле зі сталим за значенням магнітним потоком. Кутова швидкість обертання магнітного поля ω0 та частота обертання магнітного поля статора двигуна n0 залежать від частоти струму мережі живлення f та кількості пар полюсів обмотки статора р: ω0 =2πf/p , рад·с-1; n0 =60 f/p , обертів/хвилину.
Обертаючись відносно осі машини, магнітне поле перетинає обмотку ротора, індукує у ній електрорушійну силу (ЕРС), під дією якої в обмотці ротора протікає трифазний струм, який своєю чергою утворює обертове магнітне поле. Взаємодією двох магнітних потоків статора і ротора на валу ротора виникає механічний момент, під дією якого ротор обертається з кутовою швидкістю ω, близькою до ω0, тобто ω ≠ ω0 . Якщо б ці швидкості стали рівними, то не було би перетинання магнітним полем статора витків обмотки ротора, не індукувався б струм у роторі і момент двигуна дорівнював би нулю. Відставання ротора відносно магнітного поля статора характеризується ковзанням s:
s = (ω0- ω)/ ω0 , або s =( n0 - n)/ n0 .
Частота обертання ротора n=n0(1-s) = 60 f1(1-s)/p.
Діюче значення ЕРС, що наводяться у кожній фазі статора та у кожній фазі нерухомого ротора дорівнює:
E1=4,44f1w1ФmКо1 , E2=4,44f2w2ФmКо2,
де f1= f2 – відповідно частота прикладеної до статора напруги та частота струму у нерухомому роторі; w1, w2 – відповідно кількості витків обмотки статора і ротора; Ко1, Ко2 – відповідно обмоткові коефіцієнти статора і ротора.
Діюче значення ЕРС обмотки ротора під час обертання E2s= E2·s .
55

Електромагнітний момент двигуна МЕМ , що змушує ротор обертатися у напрямку обертання магнітного поля статора, залежить від напруги живлення U та від ковзання s:
М EM СМ U |
2 |
|
sR2 |
|
, |
2 |
2 |
2 |
|||
|
|
R2 |
s |
X 2 |
|
де СМ – сталий коефіцієнт для машини; R2, X2 – відповідно активний та індуктивний опір обмотки ротора.
Електромагнітна потужність визначається добутком електромагнітного моменту на кутову швидкість обертання магнітного поля:
РЕМ= МЕМ ω0 = МЕМ 2π n0/60 .
Механічна потужність на валу дорівнює добутку електромагнітного моменту на кутову швидкість обертання ротора:
РМЕХ = МЕМ ω= МЕМ 2π n/60.
Асинхронні двигуни нормують за механічною потужністю на валу-
РМЕХ .
Під час роботи двигуна виникають втрати потужності у активних опорах обмоток ротора РР та статора РС, у сталі осердь статора і ротора - ΣΔРСТ, а також механічні втрати на тертя у підшипниках, тертя ротора об повітря, вентиляцію двигуна - РМЕХ . Сумарні втрати активної потужності
РВТР у асинхронному двигуні дорівнюють:
РВТР = РС + ΣΔРСТ.+ РР + РМЕХ .
Електромагнітна потужність двигуна дорівнює РЕМ = РМЕХ +ΔРР +
РМЕХ , а потужність, яку споживає двигун з мережі - РЕ = РЕМ +ΔРС +
ΣΔРСТ. .
Потужність РЕ, яку споживає двигун з електромережі, більша від механічної потужності РМЕХ на валу двигуна на величину втрат потужності
РВТР : РЕ= РМЕХ+ РВТР . Відношення РМЕХ /РЕ називають коефіцієнтом корисної дії асинхронного двигуна - η :
зPМЕХ .
РЕ
Електропривод з використанням асинхронних двигунів характеризується великим споживанням реактивної потужності. Коефіцієнт потужності асинхронних двигунів cos φ= 0,6 – 0,87.
Коефіцієнт корисної дії та коефіцієнт потужності асинхронного двигуна залежить від його завантаження (табл.. 3.1).
Для зміни напрямку обертання ротора двигуна необхідно змінити чергування фаз напруги джерела живлення: наприклад, замість черговості фаз А, В, С установити черговість А, С, В. Таким чином для зміни напряму обертання на протилежний необхідно за допомогою комутаційної апаратури поміняти місцями будь-які дві фази у колі живлення двигуна. Зміна напрямку обертання називається реверсом двигуна.
56
Таблиця 3.1 Залежність η та cos φ від завантаження двигуна
Частки від повного |
Коефіцієнт корисної дії |
Коефіцієнт потужності |
навантаження |
η, в.о. |
cos φ, в.о. |
0,1 |
0,48 |
0,34 |
0,2 |
0,68 |
0,56 |
0,3 |
0,79 |
0,70 |
0,4 |
0,86 |
0,79 |
0,5 |
0,93 |
0,87 |
0,6 |
0,97 |
0,93 |
0,7 |
0,97 |
0,97 |
0,8 |
0,98 |
0,97 |
0,9 |
0,97 |
0,97 |
1,0 |
0,96 |
0,97 |
Під час пуску двигуна у колі статора і ротора проходять пускові струми, значення яких у 7 – 10 разів перевищує номінальний струм. Пускові струми асинхронних двигунів з короткозамкненим ротором обумовлюють необхідність (для запобігання недопустимих коливань напруги) підвищення потужності джерела живлення і зменшення опору елементів електричних мереж.
У зв‘язку з тим, що обертовий момент асинхронного двигуна пропорційний квадрату прикладеної напруги живлення, на режими роботи двигуна можуть суттєво впливати відхилення напруги мережі від номінального значення.
А |
(L1) |
|
В |
(L2) |
|
С |
(L3) |
|
О |
(N) |
|
QS |
|
|
FV |
Пуск KM |
|
Стоп |
||
КА |
||
|
||
|
1KM |
|
KM |
|
А (L1)
В (L2)
С (L3) О (N)
QS
FV
|
Схема |
VS |
керування |
|
M |
M |
|
|
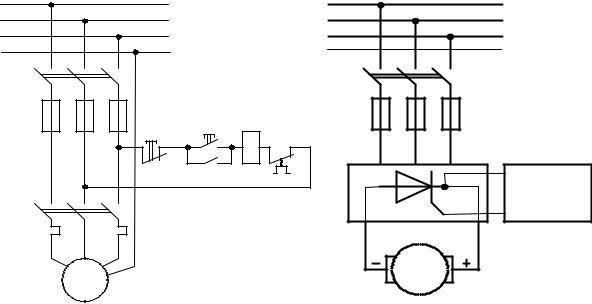
Рис. 3.6. Принципова схема керування |
Рис. 3.7. Принципова схема |
асинхронним двигуном |
керування двигуном постійного |
|
струму з перетворювачем VS |
57
На рис 3.6 наведена принципова схема керування асинхронним двигуном з короткозамкненим ротором. Для дистанційного керування асинхронним двигуном застосовують магнітний пускач КМ. Котушка електромагніта пускача живиться від напруги мережі після увімкнення рубильника QS через замикаючі контакти кнопки “Пуск”, розмикаючі контакти кнопки “Стоп”, розмикаючі контакти теплового реле КА. Після замикання кнопки “Пуск” котушка КМ отримує живлення і замикає силові контакти КМ у колі живлення двигуна М та контакти блокування 1КМ, які шунтують кнопку “Пуск”. Для зупинки двигуна достатньо короткочасно розімкнути коло живлення котушки КМ кнопкою “Стоп” або контактами КА. Для повторного запуску необхідно повторити операції пуску. Контакти КА теплового реле розмикаються у разі тривалого перевищення струму у фазах двигуна розрахункового значення (тепловий захист двигуна).
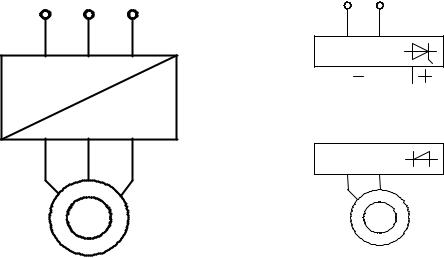
Сьогодні поширюється частотний спосіб регулювання двигунів. Він базується на тому, що швидкість обертання двигуна залежить від частоти змінного струму: n = 60 f /p , де f – частота струму, p – кількість пар полюсів двигуна. Для забезпечення необхідних характеристик двигуна необхідно одночасно з частотою змінювати й напругу живлення. Розрізняють перетворювачі безпосереднього перетворення частоти (циклоконвертори) і перетворювачі з ланкою постійного струму. Принципові схеми таких електроприводів наведені на рис. 3.8 і рис. 3.9.
Джерело змінної напруги
f1 ; U 1
f2 ; U 2
M
Рис. 3.8. Принципова схема електроприводу з циклоконвертором
Джерело змінної напруги
 f1 ; U 1
f1 ; U 1
Випрямляч

 Дросель Автономний
Дросель Автономний  інвертор
інвертор 
 f2; U 2
f2; U 2
М
Рис. 3.9. Принципова схема електроприводу з ланкою постійного струму
58
3.2.2. Електропривід синхронним двигуном
Синхронний двигун, подібно до асинхронного, складається зі статора і ротора. Статор виконаний так само, як статор асинхронного двигуна. На роторі синхронного двигуна знаходиться обмотка збудження, яка живиться від джерела постійного струму і створює сталий магнітний потік. Взаємодією обертового магнітного поля статора і поля ротора утворюється електромагнітний момент, який зумовлює обертання ротора. Ротор обертається синхронно (з однаковою кутовою швидкістю) з магнітним полем статора. Тому такі двигуни використовують в електроустановках , де необхідна стала швидкість обертання.
Усинхронних машинах малої потужності на роторі замість обмотки збудження використовують постійний магніт.
Механічна характеристика (залежність моменту на валу від частоти обертання ротора) синхронного двигуна є жорсткою і не залежить від навантаження. Тому електропривід із синхронним двигуном відрізняється відносною стабільністю механічного навантаження та нечастими пусками.
Перевагою синхронного двигуна є здатність генерувати в мережу реактивну потужність залежно від значення струму збудження у обмотці ротора. Якщо ЕРС двигуна перевищує прикладену до нього напругу мережі, то двигун генерує реактивну потужність у мережу (працює з випереджувальним cos φ). Якщо двигун недозбуджений, то він споживає реактивну потужність з мережі живлення. Тому під час проектування синхронного електроприводу часто враховуються не тільки його механічні характеристики, але й зазначені енергетичні властивості.
Усучасних синхронних двигунів коефіцієнт корисної дії η= 0,9 – 0,97, причому більші значення відповідають двигунам більшої потужності.
3.3.3. Електропривід двигуном постійного струму
Двигун постійного струму складається з нерухомої частини – станини, на якій закріплюють полюси з обмоткою збудження. Станина одночасно є магнітопроводом і основою для кріплення основних й додаткових полюсів, підшипникових щитів, клемного щитка тощо. Рухомою частиною двигуна постійного струму є якір, який складається з осердя, обмотки та колектора. Осердя виконують з тонких листів електротехнічної сталі. У них виштампувані пази для закладання обмотки якоря. Початки і кінці секцій обмотки виведені на колекторні пластини. Колектор – циліндрична конструкція, що утворюється пластинами клиновидної форми з ізоляційними прокладками між ними. Колекторні пластини виготовляють з міді. По колектору під час його обертання ковзають щітки (вугляні, графітові чи мідно-графітові) у вигляді прямокутної призми, через які якір з’єднується зі зовнішнім колом. Щітки кріплять у щіткотримачі, який змонтований на станині.
59
Струмом збудження, що проходить по обмотках полюсів машини, утворюється магнітне поле, яке взаємодіє зі струмом обмотки якоря. Якщо підвести до якоря постійну напругу, то виникає обертальний електромагнітний момент, який приводить в рух якір. Напрям обертання визначається за правилом лівої руки.
Залежно від схеми з’єднання обмоток збудження і якоря розрізняють двигуни незалежного збудження, паралельного збудження та послідовного збудження. Двигуни незалежного і паралельного збудження мають жорстку механічну характеристику і застосовуються для приводу підйомних механізмів, кранів, спеціальних електроприводів тощо. Двигуни послідовного збудження мають м’яку механічну характеристику і застосовуються для приводу транспорту. Регулювати швидкість двигунів постійного струму можна зміною напруги живлення якоря, зміною струму збудження, або зміною опору реостата у якірному колі,.
Сучасний тиристорний електропривод постійного струму, який має регулювальну здатність в широких межах, є споживачем трифазного змінного струму. На рис. 3.7 наведена схема живлення двигуна постійного струму через керований перетворювач змінного струму у постійний (випрямляч). Схема керування генерує імпульси струму керування тиристорами VS перетворювача, а зміною їх фази відносно фази напруги мережі живлення досягається регулювання напруги постійного струму, що підводиться до двигуна. Таким чином регулюється його швидкість обертання, струм та інші характеристики. Тиристорний привод, незважаючи на наявність в його складі відповідних фільтрів, може бути джерелом вищих гармонік. В той же час він також чутливий до спотворень напруги мережі живлення. Тому забезпечення синусоїдності напруги в мережі має особливо важливе значення.
3.3. Використання електроенергії для освітлення
Штучне освітлення будівель має надзвичайно важливе значення для правильної постановки і проведення виробничого процесу, для збереження зору працівників. Поряд з чисто ужитковим призначенням освітлення повинно сприяти підвищенню архітектурно-художньої виразності інтер’єру.
У зв’язку з тим, що освітлювальні установки є масовим та потужним за сумарним споживанням електроенергії приймачем, питання економічної та ефективної їх експлуатації мають важливе значення. Світові витрати електроенергії на штучне освітлення у 2002 році стали причиною до 300 млн. тонн викидів СО2 в атмосферу. За деякими прогнозами у 2010 році викиди можуть збільшитися до 450 млн. т/рік.
Основним показником, яким оцінюють роботу освітлювальної установки, є здатність забезпечувати належну видність об’єктів, комфортні умови праці. Враховуючи те, що ми бачимо об’єкти завдяки відбитому
60