

2.3. Проектування ходу світловіддалемірної полігонометрії Вимоги інструкції до інженерної полігонометрії Таблиця 4
|
№ з/п |
Показники |
ІV клас |
1 розряд |
2 розряд |
|
1 |
Гранична довжина ходу, км:
|
14
9
7 |
7
5
4 |
4
3
2 |
|
2 |
Граничний периметр полігону, км |
40 |
20 |
12 |
|
3 |
Довжина сторін ходу, км: найбільша найменша оптимальна |
3,00 0,25 0,50 |
0,80 0,12 0,30 |
0,50 0,08 0,20 |
|
4 |
Кількість сторін |
15 |
15 |
15 |
|
5 |
Відносна похибка координат, не більше |
1:25 000 |
1:10 000 |
1:5 000 |
|
6 |
Середня квадратична похибка вимірювання кута, не більше |
3 |
5 |
10 |
|
7 |
Кутова нев’язка ходу або полігону, не більше n – кількість кутів |
|
|
|
Для згущення основи на ділянці геодезичних робіт між пунктами тріангуляції (полігонометрії) 1-3 класу позначають один полігонометричний хід 4 класу, який буде використаний як основа для знімання в масштабі 1:5000.
Для проектування ходу використовують допуски, подані у таблиці 3 і керуються наступними рекомендаціями:
а) хід проектують так, щоб він розташовувався якомога ближче до середини ділянки, щоб найкраще і найрівномірніше забезпечувалась ділянка плановою основою;
б) полігонометричний хід по можливості слід проектувати вздовж доріг, залізниць, меж угідь тощо;
в) пункти полігонометричного ходу треба закладати в таких місцях, де може бути гарантоване їхнє збереження. На незабудованій території пункти полігонометрії 4 класу і 1 розряду закріпляють центрами типу У15Н або У15 попарно через 1000 метрів. На забудованій території постійними центрами закріпляють усі точки ходу.
г) пункти не мають знаходитися в заболочених, низинних і затоплюваних місцях, а також в місцях, що підлягають забудові, на проїжджій частині вулиць та доріг. Закладці підлягають всі поворотні точки ходу.
д) між сусідніми точками полігонометричного ходу має бути взаємна видимість, а візирний промінь має проходити не нижче 0,5 м над поверхнею землі;
е) необхідно включати в хід опознаки, розміщені поблизу ходу;
є) слід дотримуватись допусків на довжину сторін ходу .
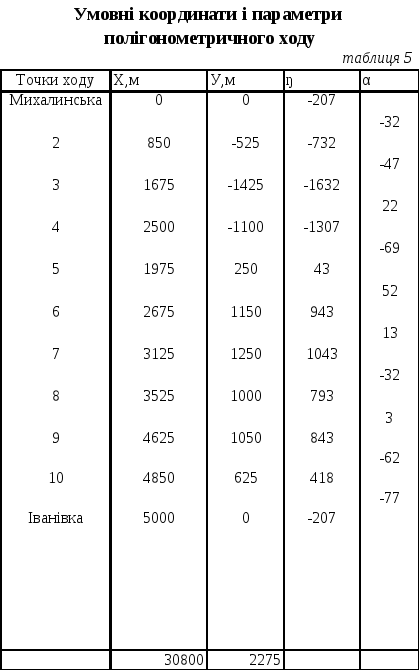
2.4. Загальна характеристика й основні параметри запроектованого полігонометричного ходу.
Полігонометричний хід 4 класу запроектований між вихідними пунктами тріангуляції Михалинська 2 кл., та Іванівка 3 кл. Для закріплення точок ходу вибираю центри типу У15Н.
Відомості про запроектований хід:

Лінії вимірюють на карті за допомогою поперечного масштабу і вимірника. Кути повороту ходу вимірюють за допомогою транспортира.
2.5. Розрахункова частина полігонометричного ходу
Спочатку визначаємо форму запроектованого полігонометричного ходу. Для цього на карті необхідно поміряти параметри зігнутості ходу ηmax (найбільша відстань від вершини ходу до лінії, проведеної через центр ваги ходу паралельно до замикаючої L) і αmax (найбільший кут, утворений стороною ходу і замикаючою L), і порівняти їх із допустимими величинами ηгран, αгран , які визначаються за формулами
ηгран = 3η
αгран = 3α
![]()
tg
α
=
![]()
Обчислимо ці величини на прикладі запроектованого нами полігонометричного ходу 4 класу, параметри якого наведено в пункті 2.4, Середню квадратичну похибку ms для тахеометра Sokia SET 3000 знаходимо
![]()
Лінії вимірюють на карті за допомогою поперечного масштабу й вимірника. Кути повороту міряють за допомогою транспортира.
![]()

Отже, хід буде ламаним, якщо
![]() і
і
![]() 625м.
625м.
Щоб
виміряти на карті
![]() ,
треба нанести на карту центр ваги ходу.
Його координати розраховують за формулами
,
треба нанести на карту центр ваги ходу.
Його координати розраховують за формулами
![]() ;
;
![]()
У такому разі координати X та Y – умовні координати пунктів запроектованого ходу. За початок умовних координат я прийняла початковий пункт ходу, а за вісь X – його замикаюча. Виміряні на карті координати X та Y записую у таблицю. Точність координат повинна відповідати масштабу карти.
Отримавши координати центра ваги ходу, я їх наношу на карту і через нього проводжу паралельну до замикаючої.

Отже, хід не є витягнутим, оскільки η і α перевищують граничні значення.

Схема полігонометричного
ходу 4класу
У світловіддалемірній полігонометрії витягнутий хід, еквівалентний зігнутому (за довжиною), поступається йому у точності, тому розрахунок виконуємо за формулою для витягнутих ходів.
![]()
Для цього ходу буде:


Тобто точність запроектованого полігонометричного ходу відповідає заданій точності полігонометричного ходу 4 класу.