

Курс, пеленг, курсовой угол. Перевод и исправление румбов.
Румбовая система счёта направлений дошла в наш век из эпохи парусного флота. В ней горизонт разбит на 32 румба, которые имеют соответствующие номера и наименования. Один румб равен 11,25о. Направления N,S,E, и W называют главными направлениями, NE, SE, SW, NW – четвертными направлениями, а остальные 24 – промежуточными. Чётные промежуточные румбы имеют названия от ближайшего главного и четвертного румбов, например, NNW, WSW, ESE и т. д. В названия нечётных промежуточных румбов входит голландская приставка «тень» (ten), что означает «к», например, NtE читается как «норд-тень-ост» и означает, что направление N «сдвинуто» на один румб к E, и т. д.
Румбовая система счёта применяется для обозначения направлений ветра, течения и волнения – это традиционная система счёта.
Истинный курс (ИК) — угол между северной частью истинного меридиана и диаметральной плоскостью судна. Истинный пеленг (ИП) — угол между северной частью истинного меридиана и направлением на объект. Обратный истинный пеленг (ОИП) — отличается от ИП на 180° Курсовой угол (КУ) — угол между носовой частью диаметральной плоскости судна и направлением на объект; измеряется от 0 до 180° в сторону правого и левого борта или по часовой стрелке от 0 до 360°. КУ правого борта имеет знак “плюс”, КУ левого борта — знак “минус”. Зависимости между ИК, ИП и КУ:
ИК=ИП—КУ; ИП =ИК+КУ; КУ=ИП—ИК.
Компасный, гирокомпас ный курс (КК,ГКК)—угол между северной частью компасного (гироскопического) меридиана и носовой частью диаметральной плоскости судна. Компасный, гирокомпасный пеленг (КП,ГКП)—угол между северной частью компасного (гироскопического) меридиана и направлением на объект. Поправка компаса (гирокомпаса) АК (АГК) — угол между истинным и компасным (гироскопическим) меридианами. Восточная (остовая) ЛК (ЛГК) имеет знак “плюс”, западная (вестовая) — “минус”.
|
ИК =КК + DК; ИП =КП + DК; КК = ИК - DК; КП = ИП - DК; ИК = ГКК - DГК; ИП = ГКП + DГК; ГКК = ИК - DГК ГКП= ИП - DГК |
|

Рис. 2.1. Исправление и перевод румбов
Магнитное склонение (d) — угол между истинным и магнитным меридианами, изменяется от 0 до 180°. Восточное имеет знак “плюс”, западное — “минус”; d снимается с карты в районе плавания и приводится к году плавания. Годовое увеличение (уменьшение) d относится к абсолютной величине склонения, т. е. к углу, а не к его знаку (см. рис. 2.1.). При уменьшении склонения, если значение его небольшое, а изменение за несколько лет превосходит указанное на карте, при переходе через ноль склонение начинает возрастать с противоположным знаком. Магнитный курс (МК) — угол между северной частью магнитного меридиана и носовой частью диаметральной плоскости судна. Магнитный пеленг (МП) — угол между северной частью магнитного меридиана и направлением на,объект. Обратный магнитный пеленг (ОМП) —отличается от МП на 180°. Девиация магнитного компаса (d) — угол между магнитным и компасным меридианами, изменяется от 0 до 180°. Восточной (остовой) — приписывается знак “плюс”, западной (вестовой) — “минус”.
Спасательные шлюпки и плоты. Действия при оставлении судна и способы выживания.
Основные спасательные средства коллективного пользования - это шлюпочное устройство, включающее шлюпки и катера, спасательные плоты, а также механизмы для их спуска и подъема.
На морских судах предусматривается наличие как минимум одной моторной дежурной шлюпки, (со скоростью не менее 4-6 уз.) для немедленного использования в случае падения человека за борт или для сбора спасательных шлюпок и плотов на воде.
Количество посадочных мест в шлюпках на судне с каждого борта должно быть достаточным для размещения в них всех людей, находящихся на судне.
Исключения могут делаться для отдельных, уникальных судов или для уникальных рейсов, например, перевозка паломников, когда обеспечить всех пассажиров посадочными местами в спасательных шлюпках невозможно.
Спасательные шлюпки являются основным спасательным средством на морских судах и могут быть открытого или закрытого типа.
Спасательные шлюпки открытого типа должны иметь запас плавучести, позволяющий удерживаться на плаву в полностью залитой шлюпке со снабжением и находящимися в ней людьми. Основные недостатки открытых шлюпок - возможность их заливания и плохая защита спасающихся от экстремальных температур и атмосферных осадков
Закрытые самовосстанавливающиеся шлюпки имеют преимущества и в последнее время находят все большее применение. В их конструкции используются пассивное или активное самовосстановление. В первом случае восстановление происходит за счет формы надводной части шлюпки и положения ее ЦТ, во втором -- за счет перетекания жидкого балласта из днищевого отсека в несимметричный бортовой. Люди пристегиваются к сидениям ремнями, чтобы в случае опрокидывания при спуске они не получили травм и чтобы не изменялось положение ЦТ шлюпки.
Шлюпки с автономной системой воздухоснабжения устроены так, чтобы обеспечить при закрытых входах и отверстиях нормальную работу двигателя не менее 10 мин, и чтобы воздух оставался безопасным и пригодным для дыхания.
Огнезащищенные спасательные шлюпки обеспечивают безопасность находящихся в них людей в течение не менее 8 мин, находясь на воде в зоне охватывающего ее со всех сторон огня. Обычно такие шлюпки комплектуются системой водяного орошения.
Максимальная вместимость спасательной шлюпки не превышает 150 человек, а ее полная масса с людьми и снабжением 20,3 т. Шлюпки вместимостью 60--100 человек должны быть либо моторными, либо с механическим приводом на гребной винт, вместимостью более 100 человек - только моторными.
Спасательные плоты, наряду со шлюпками, находят применение на морских судах. Они бывают жесткими и надувными.
Материалом для жестких плотов служат легкие сплавы или пластмассы.
Плоты снабжаются камерами плавучести, их грузоподъемность--4--12 человек. Широкого распространения жесткие плоты не получили из-за своей громоздкости.
Надувные плоты (ПСН) пассажировместимостью 6--25 человек в походном положении хранят в контейнерах, занимающих мало места.
Быстро приводить их в готовность можно двумя способами.
В первом случае экипаж освобождает от крепления контейнеры и сбрасывает их в воду.
Во втором случае освобождение контейнера происходит автоматически за счет срабатывания гидростата, когда тонущее судно погружается в воду. Обладающий положительной плавучестью контейнер всплывает, его створки раскрываются, пусковой линь, закрепленный одним концом на палубе судна, включает систему газонаполнения, которая приводит плот в рабочее (надутое) состояние за 1--3 мин, в зависимости от температуры окружающего воздуха.
Посадка осуществляется либо с воды (люди прыгают за борт и вплавь добираются до плота), либо, реже, с помощью специальных трапов.
Основные недостатки этих плотов -- необходимость прыгать в воду, иногда с большой высоты; на плот люди попадают в мокрой одежде, что при низкой температуре воздуха может привести к переохлаждению и гибели. В последнее время созданы плоты новых конструкций: они надуваются на палубе судна, здесь же проводится посадка людей, затем с помощью кран-балки их спускают за борт.
Всем плотам присущ общий недостаток -- невозможность активного перемещения, поскольку они не оборудованы двигателями.
Аварийный радиобуй либо сбрасывается экипажем с терпящего бедствие судна, либо всплывает после его гибели. В воде он автоматически включается и передает сигнал бедствия, содержащий сведения о судне (его тип, название, государственная принадлежность), характере бедствия и времени, прошедшем с начала аварии.
На случай аварии на судах предусмотрены различные средства спасения: спасательные круги, жилеты, костюмы, шлюпки и надувные плоты.
Установлен порядок пользования ими, который доводят до сведения пассажиров.
Первая проблема, встающая при кораблекрушении - паника.
Командир и члены экипажа обязаны подавить ее любыми средствами. Это должен быть неожиданный и сильный раздражитель: звук, боль, личный пример, угроза и т.п. Паника редко начинается сразу у нескольких человек, зачинщиком обычно становится один. Поэтому лучшее средство от неорганизованной попытки спасения - упреждающее внимание к потенциальным паникерам.
Расчеты показывают, что вероятность спасения при организованном оставлении судна выше, чем при паническом, от 4 до 47 раз (в зависимости от спасательного плавсредства).
Решение об оставлении судна принимает только капитан.
Посадка в шлюпки и на плоты производится только по команде с мостика.
Предварительные меры защиты - необходимо продумать пути эвакуации. Причем нужно учитывать паникующую толпу, затопления, крен судна, темноту, пожары, задымления и т.д.
В первую очередь предоставляются места женщинам, детям, раненым и старикам.
При аварии необходимо трезво оценивать ситуацию. Например лучше потерять полминуты, чтобы взять фонарь и спас. жилет, чем выиграть время, но заблудиться и утонуть в темноте отсеков судна.
Суда как правило сразу не тонут, всегда есть немного времени.
Поэтому каждому надо стараться:
- надеть больше одежды, включая перчатки, берет, сверху - защитный костюм из водонепроницаемой ткани;
- взять личные лекарства, деньги, документы, спички, зажигалку
- правильно надеть спасательный жилет;
- стараться остаться сухим и не получить травм пересаживаясь на шлюпку или надувной плот
- если вынуждены прыгать, то желательно в воду, с высоты не более 5 метров, закрыв рот и нос одной рукой, второй крепко держась за жилет;
- плыть только к спасательному средству, так как в воде с каждый движением увеличиваются потери тепла
- если позволяют обстоятельства, погрузить одеяло, дополнительные одежды, аварийное радио, питьевую воду,
- собрать все обломки, которые могут пригодиться.
Во время и после аварии четко выполнять все требования капитана, экипажа или старшего по спас. судну.
Опыт кораблекрушений показывает, что в основе этических правил лежит целесообразность.
В конечном счете, это вопрос оптимальной стратегии действий, при которой выигрывают все. Капитан в любом случае покидает судно последним.
Стрессоры выживания, которые должен принять в расчет командир, - боль, жажда, голод, переутомление и страх в условиях холода, жары или одиночества. Организуя жизнь потерпевших, надо помнить, что от 50 до 75% впадут в буйную истерику или прострацию и лишь 12-25% смогут действовать разумно и решительно. Опираясь на них, нужно немедленно оказать помощь пострадавшим и поддерживать порядок.
После отхода на безопасное расстояние всем спасательным средствам необходимо объединиться и удерживаться в месте гибели судна, для этого следует поставить плавучий якорь и освободить водяные карманы, равномерно перераспределить по спасательным средствам людей, запасы, снабжение назначить на плоту или шлюпке старшего и организовать несение вахты.
Если есть обоснованная надежда достичь берега или выйти на судовые пути пытаться поступать так. Относительную близость берега можно определить по появлению на воде веток с листьями, по поведению некоторых видов чаек и т.д.
Действовать согласно инструкции по сохранению жизни на спасательном плоту.
Общее представление о картине действий при кораблекрушении дает сводная таблица процедур по выживанию.
В первые 24 часа:
- помочь потерпевшим при посадке;
- перерезать линь;
- спустить плавучий якорь;
- обеспечить связь с другими плавсредствами;
- закрыть входные отверстия спасательного плота, если холодно или бурное море;
- надуть днище плота;
- проверить, нет ли утечек. Закрыть пробками;
- принять таблетки от морской болезни;
- собрать воду;
- проверить, чтобы все снаряжение было надежно закреплено во избежание потери в случае опрокидывания;
-в холодном климате делать упражнения; чтобы сберечь тепло, нужно держаться вместе.
А также: выставить вахтенного, спасательные средства подготовить к использованию. В первые 24 часа могут пить только больные и раненые.
Спустя 24 часа:
- часто проветривать плот;
- в жарком климате спускать днище днем и надувать ночью. Днем увлажнять одежду. Смачивать водой наружную оболочку тента, чтобы снизить температуру внутри плота;
- держать ноги по возможности сухими. Поднимать ноги и двигать ими регулярно, сняв обувь;
- вахтенные должны защищаться от обморожения или солнечных ожогов, прикрывая все участки кожи;
- сохранять дымовые шашки и ракеты до момента, когда будет реальная возможность, что они будут замечены;
- поручить одному человеку их применение. Не применять их все вместе в надежде обнаружить себя;
- прежде чем собирать дождевую воду из соответствующих отсеков, убедитесь, что там нет солевых осадков;
- сохранять жидкость в организме, сокращая бесполезные движения. Для сокращения потоотделения увлажнять одежду днем и защищаться от солнца;
- строго рационировать воду: 500-600 миллилитров на человека, поделенные на многочисленные малые дозы с самой большой дозой вечером;
- никогда не пить морскую воду или мочу;
- есть только аварийный запас.
- не есть морских рыб или птиц за исключением вынужденной необходимости или если не имеется достаточного запаса питьевой воды;
- алкоголь сильно затрудняет выживание как в холоде, так и жаре и без питья средний взрослый человек может оставаться в живых от 3 до 10 дней.
Эхолоты, устанавливаемые на судах и их принцип действия.
Принцип работы современных эхолотов основан на измерении времени прохождения в воде импульса ультразвуковых колебаний от судна до дна моря и обратно.
Принципиально эхолоты могут отличаться лишь способом определения и регистрации промежутков или функций этого времени. В эхолотах отечественного производства применяется; а) метод среднего значения анодного тока тиратрона или электронной лампы, пропорционального глубине, и б) метод линейной развёртки времени.
Первый метод применяется в эхолотах для измерения малых глубин ("Река", РЭЛ-6). Второй метод применяется во всех морских навигационных эхолотах типа НЭЛ, в связи с тем, что он является наиболее надёжным, простым и обеспечивающим автоматическую запись глубин достаточно простыми конструктивными средствами.
Гидроакустические антенны эхолотов подразделяются на пьезоэлектрические и магнитострикционные.
Пьезоэлектрические антенны имеют К.П.Д. до 0,6 - 0,7 и позволяют преобразовывать колебания частотой до сотен килогерц. Магнитострикционные антенны имеют К.П.Д. порядка 0,3 - 0,5 и удовлетворительно работают на частотах до 30 - 40 КГц.
В эхолотах последних разработок используется импульсный способ возбуждения, обеспечивающий большую точность измерения малых глубин.
В целях безопасности мореплавания последние навигационные эхолоты включают устройство сигнализирующие о выходе судна на заданную глубину. (НЭЛ-5, НЭЛ-10).
Эхолот НЭЛ-М2 устанавливают на крупнотоннажных судах; эхолот НЭЛ-М3Б на судах всех классов, включая быстроходные катера, взрывоопасные суда и ледоколы.
Эхолот НЭЛ-М2 в отличие от эхолота НЭЛ-М3Б и всех предшествующих навигационных эхолотов является двухчастотным, т.е. имеет две рабочие частоты - 12 КГц и 169 КГц. Частота 169 КГц используется для измерения глубин до 400 м, частота 12 КГц - от 400 до 3000 м.
Переход с одной частоты на другую происходит автоматически с переключением диапазонов измерения.
Морские единицы длины и скорости. Лаги, определение поправки и коэффициента лага.
Метрическая система неудобна для измерений расстояний на море, так как в прошессе судовождения приходится решать задачи, связанные с измерением углов и угловых расстояний.
Для референц-эллипсоида Красовского длина одной минуты такой дуги выражается следующей формулой:
= 1852,23 – 9,34cos2
Стандартная морская миля соответствует длине минуты мередиана референц-эллипсоида Красовского на широте 440 18’. Она отличается от значений на полюсах и экваторе всего на 0,5%.
Одна десятая часть морской мили называется кабельтов (кб) 1кб = 0,1 мили = 185,2 м
За еденицу скорости в морской навигации принят узел (уз) – 1уз = 1 миля/час.
Переход от скорости в узлах к скорости в кабельтовых в минуту производится по формуле:
Vкб/мин = Vуз/6
При рассчётах, связанных со скоростью ветра, и в других случаях используется единица метр в секунду (м/с) – 1м/с = 2уз.
Расстояние So от некоторого нуля фиксируется специальным счётчиком, а его мгновеное значение в данный момент называется отсчётом лага (ОЛ). Пройденное судном расстояние определяется с помощью относительного лага как разность между его последовательными отсчётами (РОЛ) в моменты времени, снятыми со счётчика лага:
РОЛ = ОЛi+1 - ОЛi
Лаг, как любой прибор, определяет скорость с погрешностью. Систематическая погрешность в показаниях лага может быть скомпенсирована поправкой лага Л, имеющей обратный знак. Такая поправка, выраженная в процентах, называется поправкой лага. Она расчитана по следующим формулам и может иметь как положительный, так и отрицательный знаки:
Л = (So – РОЛ)/РОЛ * 100%
Л = (Vo – Vл)/ Vл * 100%
So – фактически пройденное судном расстояние.
Vo и Vл – скорости судна относительно воды и показанная лагом.
Вместо поправки часто используют коэффициент лага:
Кл = 1 + Л/100 = Sл/РОЛ
Sл = РОЛ * Кл
Скорость судна и правильность работы лага, то есть поправка лага, определяется на ходовых испытаниях.
Управляемость и рулевые устройства речных судов.
Движение судов по внутренним водным путям в основном происходит короткими, часто меняющимися курсами, на ограниченных по ширине и глубине фарватерах, с наличием подводных и надводных препятствий, при непрерывно изменяющихся по отношению к курсу судна течениях и ветрах. Проводка судна складывается из удержания его на заданном курсе или фарватере и из комплекса маневров, предпринимаемых для обеспечения безопасности плавания.
При плавании в речных условиях особое значение для судоводителя имеет знание маневренных элементов судов и составов, особенно управляемости и инерционных качеств. Управляемостью называется способность судна сохранять заданное направление движения или изменять его в той мере, в какой это требуется судоводителю.
Под управляемостью понимаются два свойства судна — поворотливость и устойчивость на курсе. Способность судна изменять направление своего движения при перекладке руля называется его поворотливостью, а способность судна сохранять прямолинейное движение — устойчивостью на курсе.
Устойчивость на курсе и поворотливость зависят как от конструктивных особенностей судна, так и от воздействия той внешней среды, в которой перемещается судно.
Частые и самопроизвольные отклонения судна от своего первоначального курса называются рыскливостью. При наличии ее увеличивается сопротивление воды движению, что, в свою очередь, ведет к понижению скорости хода.
Рыскливость вызывается рядом причин, но главным образом ветром и волнением, креном или дифферентом судна, а также чрезмерно выпуклыми носовыми и кормовыми обводами.
Наиболее сильно рыскливость судна проявляется при прохождении участков с малыми глубинами и стесненных по ширине.
Для обеспечения управляемости суда оборудуются рулевым устройством. В настоящее время управляемость грузовых теплоходов и толкачей обеспечивается установкой поворотных направляющих насадок на гребных винтах.
Инерцию обычно принято оценивать длинами тормозного пути, свободного выбега и пути разгона, а также их продолжительностью по времени.
Расстояние, которое проходит судно за промежуток времени от момента переключения машин с полного хода вперед на полный задний ход до момента окончательной остановки судна называется тормозным путем. Это расстояние обычно выражается в длинах судна.
Расстояние, которое проходит судно за промежуток времени от момента остановки машин, работающих на передний ход, до полной остановки судна за счет сопротивления воды, называется свободным выбегом.
Расстояние, которое проходит судно с момента включения машин на передний ход до момента приобретения полной скорости при заданном режиме работы машин, называется путем разгона.
В критических случаях для погашения инерции, кроме использования работы двигателей, прибегают к отдаче якорей, а на несамоходных судах и плотах — также и к отдаче лотов и цепей.
Авторулевые «АТР» и «АИСТ».
Авторулевой типизированного ряда АТР устанавливается только на судах новой постройки, оборудованных электрогидравлическими рулевыми машинами типизированного ряда.
В систему АТР входит пульт управления — основной прибор, с помощью которого производится управление судном в автоматическом, следящем и простом режимах, а также настройка системы в процессе эксплуатации.
Пульт следящего управления—прибор, с помощью которого производится управление судном при следящем и простом режимах работы. Он устанавливается в кормовом запасном посту управления судном.
Исполнительный механизм (ИМ-1), предназначенный для управления насосом переменной производительности, или ИМ-2 — управляющий золотниковым устройством насосного агрегата постоянной производительности. ИМ устанавливается в румпельном отделении. Рулевой датчик, механически связанный с баллером руля, вырабатывает сигналы внутренней отрицательной обратной связи.
Особенность системы АТР состоит в том, что она составляет единый комплекс с рулевой машиной типизированного ряда.
Вычислительная схема авторулевого АТР собрана на бесконтактных сельсинах типа БС-404А и имеет два полностью дублированных канала управления, что значительно повышает ее надежность.
В системе предусмотрены три режима управления: простой, следящий и автоматический. Следящее управление и ввод градусных поправок к заданному курсу осуществляются поворотом штурвала, а простое дистанционное управление — путем нажатия специальных клавиш.
В авторулевом предусмотрен автоматический возврат штурвала в нулевое положение при следящем режиме, что облегчает управление судном вручную.
При эксплуатации системы АТР в режимах «следящий» и «простой» рекомендуется запускать оба насоса рулевого привода, что увеличивает скорость перекладки руля и повышает надежность рулевого управления.
При работе в режиме «Автомат» следует периодически переключать систему с одного насоса на другой для равномерной эксплуатации оборудования.
Подробно устройство системы АТР дано в эксплуатационной документации, имеющейся на судне.
Авторулевой «Аист» предназначен для установки на кораблях и судах, имеющих электрогидравлические рулевые машины. Авторулевой подключается к репитерной передаче гирокомпаса или дистанционного магнитного компаса. В комплект авторулевого «Аист» входят следующие приборы: пульт управления (ПУ), пульт следящего управления (ПСУ), переключатель пультов (10-ПП), исполнительный механизм (ИМ-1 или ИМ-2), рулевой датчик (РД).в комплект также входит набор запасных частей и приспособлений (ЗИП) и инструменты. Пульт управления является основным прибором авторулевого. В нем размещены электромеханические элементы, силовые трансформаторы, усилители и другие устройства, предназначенные для выработки сигналов управления. На лицевых панелях ПУ расположены основные органы управления. Прибор ПУ устанавливается в ходовой рубке. Он обеспечивает работу авторулевого в од-ном их трех видов управления: автоматическом, следящем, простом.
Пульт следящего управления предназначен для управления кораблем толь-ко в двух режимах: следящем и простом. Прибор ПСУ устанавливается в ходовой рубке (при отсутствии в комплекте прибора ПУ) или на верхнем мостике. По своей конструкции ПСУ аналогичен прибору ПУ, но в нем отсутствуют те элементы, которые предназначены для автоматического вида управления.
Переключатель пультов обеспечивает переключение электрических цепей, если в комплектации авторулевого имеются два и более пульта управления (ПУ или ПСУ). Количество положений переключателя зависит от числа пультов.
Исполнительный механизм служит для управления электрогидравлической рулевой машиной (РМ). В зависимости от типа насоса РМ применяется ИМ-1 или ИМ-2. Прибор ИМ устанавливается в румпельном отделении, на корпусе насоса.
Рулевой датчик содержит электромеханические элементы для выработки сигнала обратной связи в схеме авторулевого. Прибор РД устанавливается в румпельном отделении и имеет непосредственную связь с балером руля. Помимо рассмотренных приборов, в комплект авторулевого «Аист» могут дополнительно входить: соединительный ящик (СЯ-42), предназначенный для разветвления электрических цепей, и стация электроэлементов (СЭ), которая содержит ряд устройств, обеспечивающих работу схемы.
Авторулевой «Аист» характеризуется следующими техническими данными: 1. При наличии в комплекте прибора ПУ возможны 4 вида управления: автоматический, следящий, простой и ручной. Автоматический вариант управления обеспечивается сигналом от гирокомпаса или дистанционного магнитного компаса. В этом случае корабль удерживается на заданном курсе без участия человека. В следящем режиме курсоуказатель отключается от схемы авторулевого и кораблем управляет человек с помощью штурвала. При переходе на простой (резервный) вид управления схема авторулевого не используется. Управление рулем производится с помощью двух клавишей, обеспечивающих включение исполнительного механизма рулевой машины. Ручной вид управления является аварийным. Он применяется в случае отказа сей схемы авторулевого. Управление рулем производится вручную по-средством рукоятки, находящейся непосредственно на ИМ. 2. Средняя величина рыскания в автоматическом режиме (при оптимальных положениях регуляторов) составляет примерно 10 при волнении моря до 3 баллов и не превышает 30 при волнении в 5 баллов. Когда волна выше 5 баллов, авторулевой обеспечивает надежное удержание корабля на курсе, но величина рыскания при этом будет более 30. 3. При любом виде управления максимальный угол перекладки руля не превышает 350. Это обеспечивается электрическими ограничителями. 4. Надежная работа электрической схемы авторулевого предусматривает, что-бы сопротивление изоляции было не менее 1 МОм.
Подбор звезд для определения места. Нанесение на звездный глобус положения планет и Луны.

Нанесение на
глобус планет, Луны и Солнца. 
Поскольку навигационные планеты ввиду их собственного движения на глобусе не обозначены, приходится наносить их перед предполагаемыми наблюдениями на поверхность глобуса. Венеру рекомендуется наносить один раз в неделю, Марс — раз в две недели, Юпитер и Сатурн — один раз в месяц.
Порядок нанесения планет таков:
1. Выбирают из МАЕ значения a и d планеты. 2. Поворачивают сферу глобуса, подводя к оцифрованному краю меридиана наблюдателя отсчет экватора, равный a планеты. 3. Откладывают по дуге меридиана наблюдателя величину d в сторону северного или южного полюсов мира в зависимости от наименований склонения. 4. Отмечают положение планеты точкой специальным восковым или обычным мягким карандашом и ставят рядом астрономический знак данного светила. 5. Контроль: нанесенные планеты должны располагаться недалеко от эклиптики.
Для нанесения Луны надо предварительно рассчитать ее прямое восхождение, так как оно в МАЕ не приводится. Порядок работы здесь таков: 1. Выбирают из МАЕ на ближайший целый час наблюдений Тгр величины tgм и t)гр [знак ) здесь обозначает луну]. 2. Рассчитывают a) = tgгр - t)гр .
3. Наносят Луну на поверхность глобуса так же, как и планеты.
Задача нанесения Луны на практике применяется сравнительно редко.
Солнце в принципе можно наносить так же, как и Луну, его a и d допустимо выбирать на середину суток Тгр = 12ч. Для контроля следует помнить, что Солнце всегда должно располагаться на эклиптике.
Вообще можно прямо наносить Солнце на эклиптику, определив приближенно Lө.
Пример. 31 августа 1976 года. Тс = 18ч45м, lc = 13° 07,0' Ost. Нанести на звездный глобус Марс и Луну.
Решение.
31/VII. Tc - №Ost = 18ч45м - 1 = Tгр = 17ч45м.
Тгр = tgгр = 250º02,2'; tgгр - t)гр = 250º02,2' - 8º20,8' = a) = 241º41,4' ≈ 241,5º.
a♂ = 18º26,4'; d♂ = 1,4ºS (на Тгр = 18ч).
Ходкость и инерционные свойства судов в речных условиях.
Ходкостью судна называется его способность перемещаться с заданной скоростью при затрате определенной мощности главных двигателей.
При движении судна на него сразу же начинают действовать силы сопротивления воды и воздуха, направленные в сторону, противоположную его движению, преодолеваемые упорным давлением движителя. Изучение вопросов, связанных с закономерностью этих сопротивлений, дает возможность выбора наиболее рациональных обводов судна, обеспечивающих достижение скорости при минимальной затрате мощности двигателей. Сопротивления движению судна возрастают при увеличении его скорости и равны сумме отдельных сопротивлений. Сопротивление воды слагается из:
а) сопротивления формы или вихревого сопротивления Rф, зависящего от формы погруженной части корпуса и создающихся за кормой вихревых образований воды, которые, отрываясь от судна, уносят с собой приобретенную ими живую силу вращательного движения. Чем полнее корпус судна и хуже его обтекаемость, тем больше вихрей и значительнее сопротивление;
 Рис.
26. Система волн, возникающих при движении
судна. 1, 2 — расходящиеся кормовые и
носовые соответственно; 3, 4 — поперечные
носовые и кормовые соответственно.
Рис.
26. Система волн, возникающих при движении
судна. 1, 2 — расходящиеся кормовые и
носовые соответственно; 3, 4 — поперечные
носовые и кормовые соответственно.
б) сопротивления трения Rт, которое зависит от скорости судна и величины поверхности погруженной в воду части корпуса. Сопротивление трения возникает оттого, что частички воды, соприкасающиеся с погруженной поверхностью корпуса, прилипают к ней и приобретают скорость судна. Соседние слои воды также начинают двигаться, но по мере удаления от поверхности корпуса скорость их постепенно снижается и пропадает совсем. Таким образом, на поверхности погруженной части корпуса образуется так называемый пограничный слой, в поперечном сечении которого скорость воды неодинакова. Экспериментальным путем получены формулы, с помощью которых определяется трение судовой поверхности.
Инерцию обычно принято оценивать длинами тормозного пути, свободного выбега и пути разгона, а также их продолжительностью по времени.
Расстояние, которое проходит судно за промежуток времени от момента переключения машин с полного хода вперед на полный задний ход до момента окончательной остановки судна называется тормозным путем. Это расстояние обычно выражается в длинах судна.
Расстояние, которое проходит судно за промежуток времени от момента остановки машин, работающих на передний ход, до полной остановки судна за счет сопротивления воды, называется свободным выбегом.
Расстояние, которое проходит судно с момента включения машин на передний ход до момента приобретения полной скорости при заданном режиме работы машин, называется путем разгона.
В критических случаях для погашения инерции, кроме использования работы двигателей, прибегают к отдаче якорей, а на несамоходных судах и плотах — также и к отдаче лотов и цепей.
Гирокомпасы типа «Курс» и «Вега»
Со второй половины 70-х годов на суда начали устанавливать двух-режимные одногироскопные гирокомпасы с электромагнитным управлением типа «Вега». По сравнению с ГК «Курс-4» «Вега» имеет небольшие габариты, два режима работы, в нём используется астатический гироскоп, схема коррекции, исключающая скоростную и широтную погрешности ЧЭ, жидкостно-торсионный подвес, дающий возможность налагать на ЧЭ управляющие и корректирующие моменты. Отсутствует система принудительного охлаждения.
Принцип действия гироазимуткомпаса «Beга». Гироазимуткомпас (ГАК) «Вега» является двухрежимным гироскопическим курсоуказателем, обеспечивающим в режиме гирокомпаса (ГК) определение курса относительно географического меридиана, а в режиме гироазимута (ГА) - угла отклонения от заданного направления.
Чувствительным элементом «Веги» является одногироскопная гиросфера, которая с помощью горизонтальных и вертикальных торсионов, перпендикулярных главной оси гиросферы, подвешена в корпусе трехстепенного поплавкового гироблока ТПГ-6. Гироблок заполнен поддерживающей жидкостью с плотностью около 2 г/см3, в которой гиросфсра находится в состоянии нейтральной плавучести. Центр масс гиросферы совпадает с ее геометрическим центром, т. е. гиросфера не имеет маятниковости.
Одним из основных элементов схемы управления является индикатор горизонта (ИГ) - небольшой физический маятник с индукционным съемом сигнала, задемпфированный вязкой жидкостью.
При отключении сигнала индикатора горизонта (ИГ) от входа усилителя горизонтной следящей системы «Вега» работает в режиме гироазимута (гироскопа направления). В этом режиме прибор не имеет компасных свойств, гиросфера лишь сохраняет в течение некоторого времени приданное ей азимутальное направление, постепенно отклоняясь от него под действием нескомпенсированных вредных моментов и из-за ошибок системы коррекции. Этот режим, преимуществом которого является практически полное отсутствие влияния инерционных сил, применяется в основном в высоких широтах и при большой скорости движения судна при маневрировании, а также при периодических проверках и регулировке прибора.
Погрешность дистанционной передачи курса ±0,1°. Время ускоренного приведения в известный меридиан не более 30 мин, время прихода в меридиан без ускоренного приведения не более 6 ч. В прибор необходимо вводить информацию о широте (вручную) и о скорости (автоматически или вручную). «Вега» сопрягается с лагом ИЭЛ-2М, имеющим трансляционный прибор 119А или 119Э с датчиком типа ЛВТ-5 или иным датчиком, запитываемым от ГАК и вырабатывающим сигнал скорости крутизной около 0,2 В/уз.
Рекомендации по эксплуатации. Наиболее достоверную оценку исправности ГАК дает регулярная проверка поправки в режиме ГК, которую определяют по разности между истинными и компасными пеленгами береговых ориентиров (створов) или небесных светил (чаще всего—Солнца). Средняя погрешность определения поправки по створам ±0,5°, по небесным светилам ±0,7°.
Светила рекомендуется пеленговать в моменты, когда их высота не превышает 30°. При пеленговании необходимо особо тщательно горизонтировать пеленгатор по его штатному уровню. Для расчета истинного пеленга (азимута) светил гринвичское время момента пеленгования необходимо фиксировать с погрешностью ±5 с. На стоянке поправку рекомендуется определять перед выходом в море, а во время рейса — ежедневно при движении судна прямым курсом с постоянной скоростью (не ранее чем через 2 ч после маневра). Не разрешается устранять поправку разворотом корпуса прибора ВГ-1А или с помощью рукоятки «ПОПР» во избежание нарушения регулировки прибора.
Состав гирокомпаса КУРС.
Основные конструктивные элементы.
Основной частью гирокомпаса является чувствительный элемент, неподвижный относительно меридиана.
По конструкции чувствительного элемента все современные гирокомпасы делятся на одно- и двухроторные.
Появление двухроторных гирокомпасов было вызвано необходимостью устранения вредного влияния качки на гирокомпас. При помощи двух особым образом подвешенных гироскопов обеспечивается указанная выше стабилизация чувствительного элемента в горизонтальной плоскости.
Превращение свободного гироскопа в гирокомпас осуществляется для однороторных гирокомпасов преимущественно посредством жидкостного маятника; для двухроторных гирокомпасов посредством твердого маятника.
Затухание колебаний однороторных гирокомпасов осуществляется либо при помощи твердого маятника (типа «Сперри»), либо гидравлического успокоителя (типа «Браун»). В конструкциях двухроторных гирокомпасов применяется преимущественно гидравлический успокоитель.
Необходимой частью гирокомпаса является следящая система, которая предназначена для устранения вредных моментов сил трения в подвесе чувствительного элемента, а также используется для дистанционной передачи показании основного прибора гирокомпаса.
Современные однороторные гирокомпасы с торсионным (проволочным или ленточным) подвесом чувствительного элемента, как правило, имеют индукционную следящую систему, а двухроторные компасы с жидкостным подвесом чувствительного элемента - мостового типа на сопротивлениях.
Гиромоторы современных гирокомпасов обычно представляют собой асинхронные трехфазные электродвигатели с короткозамкнутой обмоткой ротора. Обороты гиромотора колеблются от 6000 до 30 000 об/мин в зависимости от конструкции гирокомпаса. Встречаются также однофазные гиромоторы индукционного типа (гирокомпас Арма).
Дистанционная передача показаний основного компаса на принимающие в современных конструкциях гирокомпасов осуществляется на переменном токе и представляет собой индукционную самосинхронизирующуюся систему.
В соответствии с типом гиромотора и синхронно-следящей системы гирокомпасы имеют различные источники питания. Обычно это многомашинные агрегаты, двигатель которых питается от судовой сети постоянного или переменного тока.
Краткое описание двухроторного гирокомпаса типа «Курс-4».
Суда морского флота России оборудованы за небольшим исключением двухроторными гирокомпасами типа «Курс».
На судах с бортовой сетью постоянного тока напряжением 110 в или 220 в устанавливаются гирокомпасы типа «Курс-3». На судах с бортовой сетью переменного тока напряжением 220 в или 380 в и частотой 50 гц устанавливаются гирокомпасы типа «Курс-4».
Гирокомпасы «Курс-3» и «Курс-4» отличаются друг от друга агрегатами питания и незначительными конструктивными особенностями.
Гирокомпас типа «Курс» состоит из основного прибора, агрегата питания, приборов управления и контроля, системы охлаждения, принимающих приборов.

Стандартный морской разговорник ИМО. Пользование английским языком в различных видах профессиональной деятельности.
Стандартный морской разговорник ИМО предназначен для связи по вопросам обеспечения безопасности плавания и оказания помощи на море между судами различной национальности, а также судами и берегом и между судами, когда отсутствует общий язык и в случаях возникновения языковых трудностей
Влияние внешних факторов на управляемость и маневренность судна.
На надводную часть
судна действует кажущийся ветер, который
является суммой истинного Wи
и курсового
ветра

 .
Надводная и подводная часть корпуса
рассматривается 2-мя свойствами:
.
Надводная и подводная часть корпуса
рассматривается 2-мя свойствами:
Равнодействующая всех сил, всегда смещается к передней кромке крыла по направлению движения.
Направление равнодействующей сил стремится к нормали поверхности.
Судоводитель всегда измеряет кажущийся ветер на движущемся судне. Он характеризуется величиной курсового угла qw и скоростью W. Величина аэродинамической силы действующей на судно рассчитывается:
 ,
,
где Са — коэффициент аэродинамичности
рв - плотность ветра
Sн - площадь проекции подводной части на ДП
W - скорость кажущегося
ветра.
Плечо аэродинамической силы в безразмерном виде можно рассчитывать

lо - смещение центра боковой парусности относительно ДП
Разложим Ra на Rax и Ray.
Продольная
составляющая Rax вызывает изменение
cопротивления,
а сила Ray
- боковое смещение. Под действием Ray
на корпусе судна возникает ветровой
дрейф с утлом 
При движении корпуса судна с углом дрейфа на подводной его части возникает
гидродинамическая
сила:
 ,
,
где Cr - безразмерная сила гидродинамической силы
Р - плотность воды
Sn - площадь проекции подводной части корпуса по ДП
V - скорость судна.
Эта сила направлена в сторону противоположную Ra, а её плечо:
 ,
,
 - угол дрейфа
- угол дрейфа
Поскольку моменты аэро и гидро сил направлены в противоположные стороны, то для удержания судна на курсе момент от силы на руле должен быть больше разности Мр>Ма - Mr. По этой причине при носовых курсовых углах судно управляется хорошо.
Управляемость судна при кормовых углах ветра.
При кормовых курсовых углах ветра, точка приложения аэродинамической силы смещается в сторону кормы.
 При
появлении угла ветрового дрейфа по
надводной части корпуса судна возникает
поперечная гидродинамическая сила Rry
- которая направлена в сторону
противоположную Ray,
но смещается в сторону носа от миделя.
В этом случае знаки Ма и Мг совпадают.
Для удержания судна на курсе необходимо
переложить руль, момент которого должен
скомпенсировать сумму Мр>Ма + Mr,
по этой причине судно на кормовых
курсовых углах ветра управляется плохо.
При
появлении угла ветрового дрейфа по
надводной части корпуса судна возникает
поперечная гидродинамическая сила Rry
- которая направлена в сторону
противоположную Ray,
но смещается в сторону носа от миделя.
В этом случае знаки Ма и Мг совпадают.
Для удержания судна на курсе необходимо
переложить руль, момент которого должен
скомпенсировать сумму Мр>Ма + Mr,
по этой причине судно на кормовых
курсовых углах ветра управляется плохо.
Потеря управляемости.
При движении постоянным курсом, при отсутствии ветра, судно удерживается на курсе перекладками руля Sтв, вокруг ДП судна Sтв=2 - 3
При движении в условиях ветра, руль приходится перекладывать на некоторый постоянный угол Sкомпенс, который компенсирует действия внешней силы манипулировать рулём этого положения на угол Sв=10-15.

Руль как средство управления, эффективен до углов перекладки руля 35

Условие потери
управляемости можно записать двумя
способами либо другим способом записи
является равенство: .
.
Момент на руле больше либо равняется сумме аэро и гидродинамической сил. Если перед потерей управляемости судно приводится к ветру, то говорят, что наступает потеря управляемости первого рода. Если же при потере управляемости судно уваливается под ветер, то говорят, что наступает потеря управляемости второго рода.

Для оценки потери управляемости для каждого судна можно построить диаграмму потери управляемости:

Магнитный компас «КМО-Т». Уничтожение девиации способом Эри. Составление таблиц остаточной девиации и корректировка в рейсе.
Компас КМО-Т (компас
магнитный, оптический для транспортных
судов) с оптикой, позволяющей транслировать
показания в любое место, с которого
управляют судном, — в ходовую рубку,
мостик и т. П. Основные узлы КМО-Т (10) —
ч. э. , котелок, нактоуз, оптическая
система и пеленгатор. Все цифры и
буквенные обозначения румбов на диске
картушки выполнены в виде сквозных
отверстий. Сверху и снизу котелок
герметично закрыт стеклянными крышками,
причем внутренняя полость разделена
пополам перегородкой, тоже стеклянной.
Нактоуз, связывающий все узлы компаса,
трубу оптической системы, выведенную
в ходовую рубку, делают из немагнитного
титанового сплава.

Кроме компасов УКП-М, на речных судах устанавливают компасы с дистанционной оптической передачей марки КМО-Т. Такой компас обычно устанавливают на верхнем мостике над рулевой рубкой, а его показания передаются в рулевую рубку к посту управления рулем. Компас КМО-Т имеет в своем составе те же части, что и обычный компас УКП-М. Передача показаний осуществляется с помощью оптической системы.
Детали оптической системы помещаются частично в нактоузе, а частично в специальной трубе оптического тракта, которая проходит от места установки компаса в рулевую рубку. Труба состоит из неподвижной и подвижной частей. В нижней подвижной части установлено зеркало, через которое видны показания курса. Оптическая система компаса КМО-Т (рис. 21) состоит из защитного стекла 1, верхней 2 и нижней 3 линз, обогревного стекла 4 и зеркала 5. Картушка, котелок, девиационный прибор и нактоуз имеют различия в конструкции по сравнению с компасом УКП-М.
Рис. 21. Оптическая система компаса КМО-Т
Сущность способа Эри
Способ Эри является одним из наиболее распространенных способов уничтожения полукруговой девиации.
При уничтожении полукруговой девиации способом Эри силы В/ и С/ компенсируйте на четырех главных магнитных курсах по девиациям, наблюденным на этих курсах.
Основными достоинствами этого способа является простота его применения и высокая точность результатов. Этот способ не требует вспомогательных приборов и поэтому применим для компасов любых систем.
Однако способ Эри имеет некоторые недостатки. При работе способом Эри приходится ложиться на магнитные курсы и на каждом из них определять девиацию, что возможно лишь при наличии на берегу створа или в крайнем случае отдаленного ориентир.
Повернув корабль
на магнитный курс N или S, ставят магнит
перпендикулярно диаметральной плоскости
и приближают его к компасу настолько,
чтобы девиация равнялась нулю; в этом
положении закрепляют магнит — он
уничтожает силу
 ;
повернув затем корабль на курс О или W,
ставят другой магнит, параллельный
диаметральной плоскости, и приближают
его настолько, чтобы девиация равнялась
нулю — этот магнит уничтожает силу
;
повернув затем корабль на курс О или W,
ставят другой магнит, параллельный
диаметральной плоскости, и приближают
его настолько, чтобы девиация равнялась
нулю — этот магнит уничтожает силу ,
повернув затем корабль на один из курсов
NO, SO, SW или NW, ставят бруски железа и
приближают их настолько, чтобы довести
девиацию на занимаемом кораблем курсе
до нуля. В этом положении бруски уничтожают
силу
,
повернув затем корабль на один из курсов
NO, SO, SW или NW, ставят бруски железа и
приближают их настолько, чтобы довести
девиацию на занимаемом кораблем курсе
до нуля. В этом положении бруски уничтожают
силу .
Таким образом девиация будет уничтожена.
.
Таким образом девиация будет уничтожена.
Ни одним из способов девиацию нельзя уничтожить до нуля. Поэтому после уничтожения девиации необходимо составить таблицу остаточной девиации и пользоваться ею для исправления показаний магнитного компаса.
Земные эллипсоиды. Меркаторские проекции. Географические координаты и их разности.
Плотность масс Земли в её толще распределена чрезвычайно неравномерно, поэтому уровенная поверхность образует сложное в математическом отношении трёхмерное тело. Эта фигура, образованная уровенной повехностью, имеющая неправильную геометрическую форму, и называется геоидом, что в переводе с греческого означает «землеподобный».
Для решения задач морской навигации используют аппроксимацию (приближение) геоида телом неправильной математической формы. Это тело – эллипсоид вращения, полученный в результате вращения эллипса вокруг малой оси. Другими словами, геоид заменяют его моделью. Сочетание геоида, а также эллипсоида по экватору и мередиану 80Е…100W.
Используют следующие способы апроксимации:
объём эллипсоида предполагается равным объёму геоида;
большая полуось элипсоида а совпадает с плоскостью экватора геоида;
малая полуось b направлена по оси вращения Земли;
сумма квадратов уклонений поверхности эллипсоида от поверхности геоида выбирается минимальной;
Для геодезических и картографических расчётов в определённых районах Земли необходимо иметь земной эллипсоид, поверхность которого максимально совпадает с поверхностью этого района. Очевидно, что такой эллипсоид должен иметь вполне определённые ориентацию и размеры. Это референц-эллипсоид. В конкретном государстве к нему и относят измерения на земной поверхности.
Отклонения данного эллипсоида от геоида на территории нашей страны не превышает 150 м.
В навигационных задачах, не требующих высокой точности, Землю принимают за шар, объём которого равен объёму земного эллипсоида, исходя за соотношение:
4/3R3 = 4/3R2b.
Для референц-эллипсоида Красовсокого радиус модели Земли как шара равен:
R = 6371110 м.
В качестве модели геоида для спутниковых навигационных систем до недавнего времени, например, использовали эллипсоид WGS-72, в настоящее время используется более точная модель WGS-84 (World Geodetic System – 1984).
Меркаторская проекция относится к классу цилиндрических нормальных равноугольных проекций, в которых параллели нормальной сетки есть параллельные прямые, а расстояние между меридианами пропорциональны соответствующим разностям долгот.
Основные этапы проектирования карты:
1-й этап: Осуществление геодезических измерений на поверхности Земли и их координатная привязка к конкретному референц-эллипсоиду.
2-й этап: Уменьшение размеров референц-эллипсоида до определённого масштаба с целью его дальнейшего развёртывания на плоскости, то есть создание условной эллипсоидальной модели Земли (глобуса) в масштабе, пригодном для изготовления карт. Это математическое преобразование эллипсоид – глобус сохраняет геометрическое подобие контуров изображений. Масштаб преобразования называется главным масштабом o будущей карты.
3-й этап:
Выбор картографической проекции для
развёртывания условного глобуса на
плоскость и проектирование (преобразование
глобус – карта). Из теории искажений
известно, что при проектировании
эллипсоида на плоскость масштаб o
остаётся постоянным лишь на определённом
множестве точек крты. В общем случае
при удалении от этого множества масштаб
изменяется и становится частным масштабом
другого множества точек. Величина
 называется увеличением масштаба.
называется увеличением масштаба.
Отношение частного масштаба к главному называется в картографии модулем параллели:

Меркаторской милей называется длина изображения одной минуты дуги меридиана ф в проекции меркатора, выраженная в линейных единицах в масштабе карты:

Линейный морской масштаб lф показывает, сколько морских миль содержится в одном сантиметре карты и представляет величину, обратную меркаторской миле:

ГЕОГРАФИЧЕСКИЕ КООРДИНАТЫ. Положение различных объектов на поверхности Земли может быть определено с помощью географических координат. Для отсчета координат на земной шар условно нанесена система точек и кругов (рис. 2). Введем ряд определений. Воображаемая прямая, вокруг которой происходит суточное вращение Земли, называется земной осью. Точки пересечения ее с поверхностью Земли называются географическими или истинными полюсами: северным Pn и южным Ps. При сечении шара плоскостью получается круг, а на поверхности шара образуется окружность. Если секущая плоскость проходит через центр шара, то круг имеет наибольшие размеры и называется большим. Круги, образующиеся от сечения шара плоскостями, не проходящими через его центр, называются малыми. Окружность большого круга QQ/, плоскость которого перпендикулярна земной оси, называется экватором. Он делит земной шар на северное и южное полушария. Окружности малых кругов, плоскости которых параллельны плоскости экватора, называются параллелями (рр/). Окружности больших кругов, плоскости которых проходят через ось Земли, называются географическими или истинными меридианами. Половину окружности меридиана PnMPs, заключенную между полюсами и проходящую через данную точку М, называют меридианом места. Меридиан PnGPs, проходящий через астрономическую обсерваторию в Гринвиче (Англия), носит название гринвичского (начального) меридиана. Гринвичский меридиан вместе с противоположным ему меридианом РnG/Ps делит земной шар на восточное и западное полушария.
В систему
географических координат входят две
сферические координаты: широта и долгота.
Географической
широтой
какой-либо точки называется угол при
центре Земли, составленный отвесной
линией (земным радиусом), проведенной
через данную точку, и плоскостью экватора
(угол MOL, см. рис. 2). Широта измеряется
дугой меридиана от экватора до параллели
данной точки. Она отсчитывается к северу
или югу от экватора от 0 до 90°. Если точка
находится в северном полушарии, ее
широте приписывается наименование N
(северная), если в южном - S (южная). Широту
обозначают греческой буквой " "
(фи).
"
(фи).
Географической
долготой
какой-либо точки называется двугранный
угол между плоскостью гринвичского
меридиана и плоскостью меридиана данной
точки (угол GOL, см. рис. 2). Долгота измеряется
меньшей из дуг экватора между гринвичским
меридианом и меридианом точки и
отсчитывается от гринвичского меридиана
к востоку или западу от 0 до 180°. Если
точка находится в восточном полушарии,
то долготе приписывают наименование Е
(восточная), если в западном - W (западная).
Долготу обозначают греческой буквой
" "
(ламбда).
"
(ламбда).
Разность широт и разность долгот. Географические координаты судна в результате сделанного перехода изменяются. Изменения широты и долготы судна называются разностями широт и долгот. Разность широт (РШ) двух точек на земной поверхности измеряется дугой меридиана, заключенной между параллелями этих точек. Наибольшее значение РШ может составить 180°, что соответствовало бы перемещению судна из одного полюса в другой. Если судно перемещалось по какой-либо одной параллели, то РШ равна 0°. Вычисленной РШ приписывается наименование к N или к S в зависимости от того, в каком направлении перемещалось судно. Разность долгот (РД) двух точек на земной поверхности измеряется меньшей из дуг экватора, заключенных между меридианами этих точек. Так как за разность долгот принимается всегда меньшая из дуг экватора, то ее значение не может превышать 180°. Если при сложении разноименных долгот получено значение, большее 180°, то за РД принимается дополнение до 360°. Такой случай может возникнуть при пересечении судном меридиана 180°. Вычисленному значению РД приписывается наименование к Е или W в зависимости от того, в каком направлении перемещалось судно. Если северной широте и восточной долготе условно приписать знак "плюс" (+), а южной широте знак "минус" (-), то значение РШ и РД можно вычислить по алгебраическим формулам:
РШ =
 2
-
2
- 1
; РД =
1
; РД = 2
-
2
- 1
(Здесь
1
(Здесь
 2
и
2
и 2
- координаты конечной, а
2
- координаты конечной, а 1
и
1
и 1
- начальной точек плавания).
1
- начальной точек плавания).
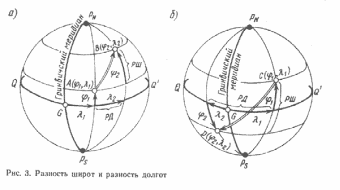
Знак результата, полученного при вычислении по формулам, покажет наименования РШ и РД. Если при вычислении РД берется дополнение до 360°, то наименование РД меняется. Чтобы не ошибиться в значении и наименовании вычисляемых РШ и РД, следует хорошо представлять взаимное расположение меридианов и параллелей на земном шаре (см. рис. 3, а и б). На практике бывает нужно найти координаты точки, в которую пришло судно, если заданы координаты пункта отхода, а также РШ и РД, характеризующие положение точки прихода. Вычисления можно произвести по алгебраическим формулам:
 2
=
2
=
 1
+ РШ ;
1
+ РШ ; 2
=
2
= 1
+ РД
(Здесь
1
+ РД
(Здесь
 2
и
2
и 2
- координаты конечной, а
2
- координаты конечной, а 1
и
1
и 1
- начальной точек плавания).
1
- начальной точек плавания).
Сущность шлюзования, состав гидроузлов. Плавание в верхнем и нижнем бьефе.
1)Шлюзование - комплекс технологических операций по вертикальному перемещению судов с уровня одного бьефа на уровень другого бьефа, связанных с работой механизмов шлюза (маневрированием воротами и затворами) и с наполнением или опорожнением камеры. В многоступенчатых шлюзах в процесс шлюзования дополнительно входят операции по переходу судов из камеры в камеру.
Шлюзование рек, увеличение глубин на отдельных участках рек путем возведения на них ряда гидроузлов, повышающих уровни воды по сравнению с имеющимися в естественных условиях. Шлюзование рек осуществляется в транспортных целях (для улучшения условий судоходства) и для комплексного использования водных ресурсов; в этих случаях в состав сооружаемых гидроузлов входят и судопропускные сооружения. Транспортное Шлюзование рек обеспечивается низконапорными гидроузлами с разборными плотинами, подпорные уровни которых не выходят из русла реки; применяется в случаях, когда пойменные земли застроены или представляют ценность в сельскохозяйственном отношении. При комплексном использовании водных ресурсов рек (например, энергетическо-транспортном, с регулированием речного стока водохранилищами) Шлюзование рек осуществляется как воднотранспортная часть комплекса, которая должна обеспечить заданные судоходные глубины на подходах к вышерасположенным гидроузлам.
2) Гидроузел, узел гидротехнических сооружений, группа гидротехнических сооружений, объединённых по расположению и условиям их совместной работы. В зависимости от основного назначения Гидроузел делятся на энергетические, водно-транспортные, водозаборные и др. Гидроузел чаще всего бывают комплексные, одновременно выполняющие несколько водохозяйственных функций.
Различают Гидроузел: низконапорные, - когда разность уровней воды верхнего и нижнего бьефов (напор) не превышает 10 м, - устраиваемые на равнинных реках, преимущественно в пределах их русла (главным образом для транспортных или энергетических целей), и на горных реках (для забора воды с целью получения электроэнергии или орошения земель); средненапорные (с напором 10-40 м) - на равнинных или предгорных участках рек, предназначенные главным образом для транспортно-энергетических, а также ирригационных целей (создаваемый ими подпор приводит к затоплению поймы реки в верхнем бьефе, образуя водохранилище, используемое для суточного и сезонного регулирования стока реки, осветления воды, борьбы с наводнениями и т.п.); высоконапорные (с напором более 40 м), служащие обычно для комплексных целей - энергетики, транспорта, ирригации и др.
Сооружения, входящие в состав Гидроузла, подразделяются на основные и вспомогательные. Основные сооружения, обеспечивающие нормальную работу Гидроузла, в свою очередь, делятся на общие (плотины, поверхностные и глубинные водосбросы, сооружения для удаления льда, шуги, наносов, регуляционные, сопрягающие и др.), обеспечивающие необходимые напор и ёмкость водохранилища, а также гидравлические условия, отвечающие измененному гидрологическому режиму реки (см. Гидротехнические сооружения), и специальные (ГЭС, судоходные шлюзы, судоподъёмники, рыбоходы, бревноспуски, плотоходы и т.д.), выполняющие те функции, для которых был создан Гидроузел К вспомогательным сооружениям относятся жилые, административно-хозяйственные и культурно-бытовые здания, сооружения водопровода и канализации, дороги и т.п. Временные сооружения (перемычки, склады строительных материалов, бетонные и арматурные заводы, мастерские, подъездные пути и пр.) обычно функционируют в период строительства Гидроузел, но некоторые из них иногда совмещают с постоянными (например, путём включения перемычек в состав плотины). Прочие сооружения - транзитные дороги и мосты, проходящие в зоне Гидроузел (например, пересечение Калининской ж. д. с каналом им. Москвы в районе расположения шлюза № 8), промышленные предприятия, возникшие на его базе и использующие его электроэнергию и т.п., связываются с Гидроузел главным образом территориально.
Место размещения Гидроузла, т. е. тех его сооружений, которые образуют т. н. напорный фронт, называется створом. Взаимное расположение основных сооружений, называемое компоновкой Гидроузел, представляет собой сложную инженерную задачу, решаемую с учётом эксплуатационных, строительных и технико-экономических требований. Большое разнообразие природных и местных условий не позволяет установить единые правила для размещения и компоновки Гидроузел Эти вопросы решаются каждый раз индивидуально с учётом всего комплекса условий, требований и характера взаимодействия сооружений.
3)Бьеф, или плес - так называется горизонтальная часть русла канализованных рек и каналов, отделяющаяся одна от другой изменениями уровня воды; в таковых местах находятся обыкновенно гидротехнические сооружения, служащие для прохода судов с одного уровня к другому, за которыми и образуются бьефы такой глубины, что суда могут в них плавать совершенно свободно. Назначая длину бьефов, следует помнить, что самое большое сбережение воды получится при нескольких более коротких бьефах на длине данного уклона канала, чем при одном длинном бьефе с многокамерным шлюзом. Каждый бьеф канала, для того, чтобы вода не могла подняться слишком высоко в канале, должен иметь удобное место для выпуска лишней воды. Когда длина бьефа более трех верст, то в таком случае надо делать несколько затворов для возможности осушать или исправлять канал по частям.
Эксперимент эксплуатации водосбросных гидротехнических сооружений свидетельствует о том, что наиболее — нередко подвергаются разрушению устройства нижнего бьефа. Правильно выявленные причины разрушения позволяют составить обоснованный проект ремонтных работ. Основными причинами разрушения устройств нижнего бьефа являются: повышенные гидродинамические нагрузки; неправильная эксплуатация (маневрирование затворами); попадание на водобой бетонных массивов продуктов скальных обрушений и других крупных габаритов, способных разорять бетонное крепление при длительном вращении в колодце; некачественное выполнение бетонных работ; недостаток конструкции; преждевременный пуск сооружения в эксплуатацию; непредвиденные явления и т. д.
Условия движения и стоянки судов у плотин осложняются неправильными течениями, возникающими вследствие сброса воды через плотину и ГЭС. В верхнем бьефе образуется течение, направленное в сторону плотины или здания гидроэлектростанции, а в нижнем бьефе - течение от сбросов воды через плотину и выхода ее из турбин ГЭС, зависящее от особенностей сооружений гидроузла. Колебания расхода воды, что затрудняет движение и стоянку судов. Управление судном у плотин требует повышенного внимания, так как имеются случаи срыва судов с якорей, навалов их друг на друга или посадки на грунт.
Условия судоходства во время строительства гидроузла зависят от организации и очередности строительных работ. Для строительства здания гидроэлектростанции 5 (рис. 46) и водосливной бетонной плотины 3 часть русла реки отгораживают перемычками 6, за которыми откачивают воду (затем уже ведут работы). Одновременно намывают земляную плотину 2 и сооружают шлюз 4 с верхним подходным судоходным каналом 1. В оставшейся при этом свободной части русла 7 скорость течения увеличивается, возникают свальные течения, затрудняющие судоходство.
После окончания строительства гидроэлектростанции весь расход пускают через турбины, а свободную часть русла перекрывают земляной плотиной. В этот период и в период завершения работ на гидроузле суда движутся через временный канал и шлюз.
По другой схеме гидростанцию и водосливную плотину строят на пойме и к ней в нижнем бьефе прорывают новое русло. Когда эти сооружения готовы, старое русло перекрывают земляной плотиной. Во время подготовки к перекрытию русла судоходство затруднительно, так как русло сужается из- за отсыпки каменных призм с обоих берегов и в связи с этим возрастает скорость течения.
Лаги гидродинамические, индукционные, гидроакустические, доплеровские и корреляционные.
В настоящее время на судах морского транспортного флота применяются индукционные, гидродинамические и радиодоплеровские лаги, измеряющие скорость относительно воды.
Индукционные лаги. Их действие основано на свойстве электромагнитной индукции. Согласно этому свойству при перемещении проводника в магнитном поле в проводнике индуктируется э.д.с., пропорциональная скорости его перемещения.
С помощью специального магнита под днищем судна создаётся магнитное поле. Объём воды под днищем, на который воздействует магнитное поле лага, можно рассматривать как множество элементарных проводников электрического тока, в которых индуктируется э.д.с.: значение такой э.д.с. позволяет судить о скорости перемещения судна.
Гидродинамические лаги. Принцип действия основан на измерении гидродинамического давления, создаваемого скоростным напором набегающего потока воды при движении судна.
Поправка гидродинамического лага, как правило, нестабильна. Основными причинами, обуславливающими её изменения во время плавания, являются дрейф судна, дифферент, обрастание корпуса, качка и изменением района плавания.
Рассчитать изменение поправки лага от влияния первых трёх причин не представляется возможным.
Абсолютные лаги. Под абсолютными понимаются лаги, измеряющие скорость судна относительно грунта. Разработанные в настоящее время абсолютные лаги являются гидроакустическими и делятся на доплеровские и корреляционные.
Гидроакустические доплеровские лаги (ГДЛ).
Принцип работы ГДЛ заключается в измерении доплеровского сдвига частоты высокочастотного гидроакустического сигнала, посылаемого с судна и отражённого от поверхности дна.
Результирующей информацией являются продольная и поперечная составляющей путевой скорости. ГДЛ позволяет измерить их с погрешностью до 0.1% . Разрешающая способность высокоточных ГДЛ составляет 0,01 - 0,02 уз.
При установке дополнительной двух лучевой антенны А2 (см. рис.) ГДЛ позволяет контролировать перемещение относительно грунта носа и кормы, что облегчает управление крупнотоннажным судном при плавании по каналам, в узкостях и при выполнении швартовых операции.
Большинство существующих ГДЛ обеспечивают измерение абсолютной скорости при глубинах под килём до 200-300 м. При больших глубинах лаг перестаёт работать или переходит в режим измерения относительной скорости, т.е. начинает работать от некоторого слоя воды как относительный лаг.
Источниками погрешности ГДЛ могут быть: погрешность измерения доплеровской частоты; изменение углов наклона лучей антенны; наличие вертикальной составляющей скорости судна. Суммарная погрешность по этим причинам у современных лагов не превышает 0.5%.
Корреляционные лаги. Принцип действия гидроакустического корреляционного лага(ГКЛ) заключается в измерении временного сдвига между отражённым от грунта акустическим сигналом, принятым на разнесенные по корпусу судна антенны.
На глубинах до 200 м ГКЛ измеряет скорость относительно грунта и одновременно указывает глубину под килём. На больших глубинах он автоматически переходит на работу относительно воды.
Достоинствами ГКЛ по отношению к ГДЛ являются независимость показаний от скорости распространения звука в воде и более надёжная работа на качке.
Гидроакустический лаг (ТАЛ) - лаг, основанный на использовании законов распространения акустических волн в воде.
Гидродинамический лаг (ГЛ) - лаг, определяющий скорость судна в зависимости от динамического давления воды, обтекающей судно при его движении.
Индукционный лаг (ЛИ) - лаг, определяющий скорость судна в зависимости от электродвижущей силы, индуктируемой в потоке воды, обтекающем судно при его движении.
Доплеровский лаг (ДЛ) - лаг, основанный на использовании эффекта Доплера.
Дальность видимого горизонта, дальность видимости огней и предметов.
Дальность видимого горизонта позволяет судить о видимости предметов, находящихся на уровне воды. Если предмет имеет определенную высоту h над уровнем моря, то наблюдатель может обнаружить его на расстоянии, превышающем De так как какая-то часть предмета будет возвышаться над горизонтом. Следовательно, предельная дальность видимости предмета Dп (рис. 6) зависит как от е, так и от h. Из рис, 6 видно, что Дп равна сумме дальностей видимого горизонта с высоты глаза наблюдателя е и с высоты предмета h, т. е. Dg=-De + Dh, или Dп=2,08√e+ 2,08√ h, где е и h выражены в метрах, а Дп — в милях.
По этой формуле рассчитана помещенная в приложении к МТ-75 номограмма, с помощью которой можно найти значение Dп по известным е и h.
Dn может быть найдена и с помощью табл. 22 МТ-75 путем сложения выбранных из нее дальностей видимого горизонта с высот е и h.
На морских картах и в навигационных пособиях приводится заранее вычисленная дальность видимости огней маяков Dк с высоты глаза наблюдателя 5 м. С такой высоты De равна 4,7 мили. При е, отличной от 5 м, в DK следует вносить поправку. Как видно из рис. 6, значение поправки ∆ Dк равно разности дальностей видимого горизонта с действительной высоты глаза наблюдателе е. и расчетной высоты 5 м:
∆ Dк=Dе-D5=2,08√e-2,08√5 Или ∆ Dк=2,08√e-4.7
Знак поправки положителен, если е>5 м, и отрицателен, если е <5м.
Действительная дальность видимости огней маяков рассчитывается по формуле Dп=Dк+∆Dк
Дальность видимости предметов, расcчитанная по формуле, называется геометрической, или географической. Вычисленные результаты соответствуют некоторому среднему состоянию атмосферы в дневное время суток. При мгле, дожде, снегопаде или туманной погоде видимость предметов, естественно, сокращается. Наоборот, при определенном состоянии атмосферы рефракции может быть очень большой, вследствие чего дальность видимости предметов оказывается значительно больше рассчитанной,
Па
маяках источники снега обычно имеют
такую мощность, которая обеспечивает
видимость огни на расстоянии, не меньшем
геометрической дальности видимости
маяка. Однако в отдельных случаях, если
огонь недостаточно яркий, оптическая
дальность
видимости огня, может быть меньше
геометрической. Тогда на картах
указывается меньшая дальность видимости.
Поэтому при расчете дальности видимости
маяков в дневное время рекомендуется
вычислять ее по формуле Dп=Dе+Dh
выбирая
значение h
из навигационных пособий
Управление судном при производстве поворотов и оборотов, привале и отвале.
Чтобы привалить маломерным судном к необорудованному берегу, необходимо выбрать удобное для высадки пассажиров пологое место. Необходимо учесть снос под воздействием течения. Подходить к стоящему судну или бону необходимо так, чтобы прижаться бортом. Приваливать рекомендуется против течения или ветра. Перед отвалом необходимо осмотреть акваторию водоема и убедиться, что вблизи нет других судов. При отвале судно отталкивают от берега и ставят так, чтобы винт оказался на глубоком месте и не мог удариться об отмель.
Кодекс ОСПС.
После трагических событий 11 сентября 2001 года двадцать вторая сессия Ассамблеи Международной морской организации единогласно решила разработать новые меры по охране судов и портовых средств.
12 декабря 2002 года Конференция Договаривающихся правительств одобрила поправки к Международной конвенции по охране человеческой жизни на море 1974 года (МК СОЛАС-74), касающихся специальных мер по повышению безопасности и усилению охраны на море, и Международный кодекс по охране судов и портовых средств (Кодекс ОСПС).
Кроме новых правил, вошедших в Главу XI-2 МК СОЛАС-74, и части А и Б Кодекса ОСПС, Дипломатическая конференция приняла поправки к существующим правилам МК СОЛАС-74, способствующие ускорению выполнения требований оборудования судов автоматическими идентификационными системами, и приняла новые правила для включения в Главу XI-1 МК СОЛАС-74, касающиеся судовых опознавательных номеров и необходимость иметь на судне журнал непрерывной регистрации истории судна. Наиболее важными поправками являются новая Глава XI-2 "Специальные меры по усилению охраны на море" МК СОЛАС-74 и Кодекс ОСПС.
Главой XI-2 МК СОЛАС-74 вводятся новые требования, регламентирующие охрану судов и портовых средств с целью противодействия незаконным актам, направленным против безопасности мореплавания и перевозки морем защищенных грузов.
Требования Кодекса ОСПС формируют международную структуру, посредством которой суда и портовые средства могут взаимодействовать с целью обнаружения и предотвращения актов, угрожающих безопасности в секторе морского транспорта.
Кодекс ОСПС состоит из двух частей.
Часть А носит обязательный характер, а часть Б - рекомендательный. Рекомендации в части Б, следует учитывать при осуществлении положений Главы XI-2 МК СОЛАС-74 и части А Кодекса ОСПС.
Часть А устанавливает требования к:
Декларации об охране;
защите судна;
оценке уязвимости судна;
плану охраны судна;
лицу командного состава, ответственному за охрану судна;
тренировкам и учениям на судах;
безопасности портовых средств;
оценке уязвимости портовых средств;
плану охраны портовых средств;
должностному лицу компании, ответственному за охрану;
должностному лицу портового средства, ответственному за охрану;
тренировкам и учениям на портовых средствах;
освидетельствованию и сертификации;
выдаче и подтверждению свидетельств;
а также устанавливается:
ответственность Договаривающихся правительств; и
обязанности судоходной компании.
В части Б Кодекса ОСПС приводятся разъяснения и рекомендации по организации и выполнению требований части А и Главы XI-2 МК СОЛАС-74
Навигационные пособия при плавании по Дунаю. Деятельность Дунайской Комиссии.
Одним из направлений деятельности ДК ст. 8 Белградской конвенции определила «издание справочников, лоций, навигационных карт и атласов для нужд судоходства». Издательская деятельность, как и остальные виды деятельности ДК, стала практически повседневной заботой Секретариата — постоянно действующего исполнительного органа Дунайской комиссии, штаб-квартира которой сначала находилась в Галаце, а в 1954 г. была перенесена в Будапешт.
Начало издательской деятельности Дунайской комиссии было положено выпуском в 1951 г. протоколов первых трех сессий ДК, состоявшихся в ноябре 1949-го, марте и декабре 1950 г. По состоянию на середину 2008 г. комиссией было выпущено 473 издания (возможная погрешность в расчетах — в пределах 2 %). По градации, принятой в ДК, ее издательская деятельность относится к семи укрупненным направлениям.
В число 73 протоколов, выпущенных ДК за 60 лет, вошли и протоколы пяти внеочередных и двух юбилейных сессий комиссии. Среди прочих изданий общего характера за указанный период следует назвать пять выпусков брошюр, содержащих общие сведения о ДК, два выпуска текста Конвенции о режиме судоходства на Дунае и др. Вне общего ряда стоит единственное за всю историю ДК «художественное» произведение — выпущенная в 2004 г. к 150-летию Европейской Дунайской комисии и 50-летию пребывания ДК в Будапеште книга «Дунайская Комиссия и дунайское судоходство».
Наибольшее количество изданий ДК посвящается основному направлению деятельности комиссии, связанному с навигационными вопросами. Здесь, прежде всего, следует выделить выпуск поучастковых лоцманских карт р. Дунай — за все годы их было издано 28. Со временем лоцманские карты Дуная начали издаваться одновременно в виде гармошки и альбома, а с 1986 г. — только в виде альбома. Судоходная часть Дуная от Кельхейма (2414,7 км) до Сулины отражена в 11 альбомах поучастковых лоцманских карт.
Одно из важнейших изданий ДК — «Лоция реки Дунай» выходила всего три раза — в 1953, 1966 и 1989 гг. Кроме основного блока информации, посвященной естественным условиям и навигационным особенностям отдельных участков реки (они сведены в последнем издании в 7 глав), лоция содержит также 10 приложений в табличной и графической форме (продольный профиль реки, схемы гидроэлектростанций, перечень мостов с габаритами, таблицы расстояний, основных зимовников и временных зимних убежищ и т. д.). В 50—60-х годах прошлого века был выпущен также десяток поучастковых лоций, охвативших Средний и Нижний Дунай (от 1880 до 0 км) и навигационное описание отдельных участков реки и фарватера. Позднее этот опыт больше не повторялся.
Полтора десятка изданий ДК, начиная с 1953 г., посвящены правилам плавания на Дунае. В этой сфере главными для судоводителей являются «Основные положения о плавании по Дунаю» (ОППД), принятые впервые ДК в 1951 г. и вышедшие отдельным изданием в 1953 г. ОППД стали базисом для компетентных органов придунайских стран при разработке и вводе в действие местных правил плавания на своих участках реки (первое издание относится к 1981 г.). ОППД периодически пересматриваются для приведения их в соответствие с «Европейскими правилами судоходства по внутренним водным путям» (ЕПСВВП), которые «курирует» Рабочая группа SC. 3 по внутреннему водному транспорту ЕЭК ООН.
Более чем двумя десятками изданий представлены нормативы по применению радиосвязи в судоходстве — преимущественно в форме рекомендаций, а также правил, инструкций и т. п. Другие издания по навигационным вопросам включают неоднократно обновляющиеся выпуски инструкций по расстановке знаков навигационной путевой обстановки на Дунае, различные рекомендации (по техническим предписаниям для судов внутреннего плавания, по унификации электрооборудования толкаемых составов и др.), обзорные (настенные) карты р. Дунай и проч. Особого внимания среди изданий подобного рода заслуживают «Километровник реки Дунай» и «Справочник судоводителя».
Километровник переиздавался четыре раза, в последний раз — в 2004 г. Это компактное издание объемом в четыре сотни страниц дает наглядное представление о всех заслуживающих внимания объектах вдоль судоходной части Дуная от устья до Кельхейма. Местоположение объектов по обоим берегам реки обозначено в Километровнике с точностью до 0,01 км.
«Справочник судоводителя» выдержал в ДК, начиная с 1971 г., четыре издания, последнее вышло в 2006 г. Справочник можно отнести к одному из наиболее информационно насыщенных пособий ДК. Более двадцати разделов этого издания содержат самые существенные сведения об инфраструктуре судоходного Дуная (водный путь, порты, зимовники и временные зимние убежища, мосты, шлюзы и др.), схемы судоходных соединений Дуная, максимальные габариты и схемы толкаемых и буксируемых составов на реке (по участкам), выдержки из предписаний о правилах шлюзования на Дунае, прочие материалы справочного характера, полезные не только судоводителям, но и широкому кругу иных специалистов, занимающихся проблемами дунайского судоходства. Рекомендации для ДК по совершенствованию некоторых разделов «Справочника судоводителя» были подготовлены Укрниимфом в издании 2001 г.
Среди изданий по гидротехническим вопросам три представляют собой ежегодные выпуски, из них старейшее, издававшееся в 1962 — 1980 гг. — «Информация о содержании судоходного фарватера р. Дунай от Регенсбурга до Сулины (2379,3 — 0 км)». В период 1981—2001 гг. это издание охватывало участок от Ульма (2588,0 км) до Сулины.
Вторым ежегодным выпуском по вопросам гидротехники были «Паспорта перекатов на Дунае», выдержавшие в 1962 —1979 гг. 19 изданий. Затем сведения о перекатах вошли в информационные издания о содержании судоходного фарватера р. Дунай.
Третье ежегодное издание можно назвать новым условно, ибо оно является результатом трансформации ранее выходившего ежегодника, что видно и из его названия — «Информация о содержании судоходного фарватера и о критических участках на Дунае от Кельхейма до Сулины» (выходит с 2003 г.). Данное издание охватывает фактически участок Дуная, на который распространяется международно-правовой режим реки. Содержащаяся в ежегоднике информация формируется по данным придунайских стран и отражает годовые объемы регуляционных работ по содержанию судоходного фарватера и других работ в интересах улучшения условий судоходства и обслуживания судов в портах, данные о ледовом режиме, перекатах, критических участках на реке за отчетный год и др. Одно из наиболее «солидных» изданий ДК по формату и весу — «Альбом мостов на Дунае». Вышли два его издания, последнее — в 1992 г., дополненное в 2001 г. информацией о новых мостах и изменениях в ранее уже опубликованных материалах. «Альбом мостов на Дунае» в качестве навигационного пособия содержит все необходимые сведения для безопасного прохождения судов под мостами. Главные из них — это номера устоев, между которыми расположены судоходные пролеты, габариты судоходных пролетов, отметки судоходных уровней воды, шкала свободной высоты судоходного пролета моста и др. Нумеруются устои мостов от левого к правому берегу. Альбом состоит из вставных складывающихся листов, каждый посвящен отдельному мосту. Графическая часть включает ситуационный план участка реки, где расположен мост (М 1:5000/10000/20000), продольный разрез судоходных пролетов моста (м 1:400/500/1000) с указанием их основных габаритов. В качестве иллюстрации здесь на рисунке приведена схема судоходных пролетов моста Харош в черте г. Будапешта. Из числа других изданий ДК по вопросам гидротехники следует отметить доклады о ледовом режиме Дуная за определенные периоды (3 издания), схемы продольного профиля реки (3 издания), а также относимые комиссией к категории проблем гидротехнического характера «Рекомендации по предотвращению загрязнения вод Дуная от судоходства» (2 издания) и др.
Четвертое направление издательской деятельности ДК связано с выпуском информационных и других материалов по гидрометеорологическим вопросам. Здесь приоритет принадлежит одному из старейших справочных пособий комиссии — «Гидрологическому ежегоднику реки Дунай», 52 выпуска которого увидели свет, начиная с первого издания 1954 года. Как и большинство изданий, характеризующих отдельные участки реки или расположенные на них объекты, данное издание готовится на основании материалов, полученных от придунайских стран по принятому ДК макету. Содержание ежегодника составляют сведенные в пять глав таблицы уровней расходов воды и ее температуры, ледового режима реки и осадков. В каждом выпуске ежегодника помещена схема Дунайского бассейна с указанием водомерных постов и метеорологических станций в информационной сети придунайских стран. Обобщение основные данных гидрологических ежегодников в динамике, начиная с 1921 г, находило свое отражение в «Гидрологических справочниках реки Дунай», 6 выпусков которых увидели свет в период 1954 — 2005 гг. Это, пожалуй, единственное систематизированное издание международной организации, которое содержит информацию, задолго предшествующую году создания самой Дунайской комиссии (1949 г.).
Преследуя цели обеспечения судоходства гидрографическими и гидрометеорологическими материалами, а также гидрометеорологическими прогнозами, ДК разработала и приняла ряд рекомендаций, вышедших отдельными изданиями. К их числу относятся «Рекомендации по координации гидрометеорологической службы на Дунае» (с учетом измененного названия пособия вышло 6 его изданий), рекомендации, относящиеся к составлению штормовых предупреждений на реке, установлению низкого судоходного и регуляционного уровня воды на Дунае и др. Самые немногочисленные издания ДК относятся к пятому направлению издательской деятельности комиссии, оно касается вопросов эксплуатации флота и экологии. Данное направление в качестве самостоятельного выделилось только в 1997 г. после дополнения «Рекомендаций, касающихся технических предписаний для судов внутреннего плавания», новой главой «Предотвращение загрязнения вод». Пять изданий ДК по вопросам эксплуатации и экологии связаны с перевозкой по реке опасных грузов, из них три источника — это сами «Правила перевозки опасных грузов по Дунаю (ВОПОГ-Д)», изданные в последние годы трижды, — в 1997 г., 2004 г. и 2007 г. Наиболее широким спросом пользуются издания ДК по статистическим и экономическим вопросам. Они востребованы не только специалистами, непосредственно занятыми в сфере дунайского судоходства, но и экономистами и политиками, прослеживающими развитие общей ситуации в странах Дунайского бассейна, проектировщиками, прогнозирующими развитие транспортной инфраструктуры в регионе и др. Широко применяются издания ДК по статистике и экономике в учебном процессе.
Начало статистическому учету судоходства Дунайской комиссией было положено в 1950 г. Однако в систематизированном виде показатели объемов перевозок, наличия флота и грузооборота портов на бассейне публикуются ДК, начиная с 1962 или 1964 года. Эта информация приводится в «Статистических ежегодниках Дунайской комиссии», до настоящего времени вышли 44 сборника.
Кроме «Статистических ежегодников ДК», периодически выпускается «Статистический справочник Дунайской комиссии». Он содержит итоговые таблицы основных статистических показателей за период с 1950 года. До настоящего времени вышло 5 таких справочников, последний — в 2004 г.
К другим изданиям по статистическим и экономическим вопросам относятся сборники статистических документов, информационные сборники о действующих в дунайском судоходстве сборах, штрафах и пошлинах (вышло 3 издания) и др.
Последнее, седьмое направление издательской деятельности ДК относится к юридическим и организационным вопросам. Здесь следует выделить «Правила процедуры ДК» (9 изданий), «Правила речного надзора на Дунае» (2 издания), рекомендации, относящиеся к унификации правил санитарного, ветеринарного, фитосанитарного, таможенного надзора и др.
По существу, являются самостоятельными периодическими изданиями, но оформляются пока в виде документов ДК, информационные выпуски о судоходстве на Рейне, Майне и канале Майн — Дунай, доклады об экономическом положении дунайского судоходства и др.
За подготовку и выпуск изданий ДК отвечает советник Секретариата Дунайской комиссии по вопросам изданий и по связям с общественностью. В трехлетней каденции сотрудников ДК, начавшейся в июне 2007 г., эту должность занимает Андрей Тома, представляющий в Секретариате комиссии Республику Молдова.
Тормозной путь. Влияние водоизмещения, осадки, дифферента, скорости и запаса воды под килем. Эффект проседания.
Влияние мелководья на управляемость судна проявляется в снижении эффективности пера руля. Происходит это по следующим причинам. Движущееся судно имеет перепад давлений вдоль корпуса. В результате этого уровень воды в средней части пониженный, а в районе форштевня и ахтерштевня - повышенный. Перепад уровней воды в кормовой оконечности приводит к тому, что вода, перетекая от повышенного уровня к пониженному, образует попутный поток, скорость которого зависит от величины перепада уровней воды. При движении судна на мелководье перепад давлений (и как следствие - уровней воды) увеличивается по мере приближения скорости судна к ее критическому значению Vкр .
Вращающий момент, создаваемый пером руля, при всех прочих равных условиях зависит от скорости набегающего потока. Увеличение скорости попутного потока при выходе судна на мелководье снижает скорость набегающего на перо руля потока и, как следствие, снижает эффективность рулевого устройства.
Другим фактором, влияющим на управляемость, является то, что при выходе судна на мелководье для сохранения прежней скорости требуются большие энергетические затраты, чем на глубокой воде. Эта дополнительная энергия расходуется на то, что в процесс волнообразования вовлекаются дополнительные массы воды. Таким образом происходит увеличение кинетической энергии движущейся вместе с судном воды, а следовательно, и кинетической энергии системы “судно плюс присоединенные массы воды”.
Увеличение инерционности судна при падении эффективности пера руля приводит к ухудшению маневренных и тормозных характеристик судна.
При движении судна в узкости наблюдаются те же явления в поведении судна, что и на мелководье с неограниченной акваторией, только проявляется все это в более резкой форме.
Влияние мелководья на поведение судна зависит не только от глубины моря, но и от габаритов судна и его скорости. Существуют различные эмпирические формулы для определения глубины, с которой начинает сказываться мелководье. Согласно одной из формул [1] влияние мелководья на поведение судна наблюдается на глубинах:
|
|
(1) |

где Нгл - глубина, м;
d - средняя осадка судна, м;
Vс - скорость судна, м/с;
g - ускорение свободного падения, 9.81 м/с2.
Другим критерием оценки влияния мелководья, связанным с изменением картины волнообразования, является “число Фруда” по глубине:
|
|
(2) |

Согласно этому критерию ощутимое влияние мелководья начинает проявляться при Frн > 0.4 - 0.5 .
Термин “скоростное проседание” обозначает разность между глубинами под килем движущегося судна и судна, не имеющего хода относительно воды.
Причиной скоростного проседания судна является следующий физический процесс, происходящий вокруг движущегося судна.
При рассмотрении движения судна относительно воды можно в равной степени говорить о движении воды относительно судна. Таким образом, частицы воды, встречающие на своем пути корпус судна, вынуждены его огибать вдоль бортов и днища (рис.1).

Рис.1
Поскольку вода обладает свойством неразрывности, то вытесняемые в стороны частицы воды, двигаясь по криволинейной траектории, за то же самое время должны пройти больший путь чем частицы, движущиеся по прямой. Следовательно, скорость частиц, огибающих судно, выше скорости частиц, движущихся по прямой. Кроме того, эти частицы, находившиеся в состоянии покоя относительно грунта, образуют поток, движущийся относительно грунта в направлении, встречном направлению движения судна.
Зависимость между скоростью потока жидкости и давлением жидкости на данном участке описывается уравнением Бернулли:
|
|
(3) |

где Р - давление жидкости на данном участке;
g - плотность жидкости;
Vв - скорость потока.
Из выражения (3) видно, что если на каком либо участке скорость движения жидкости увеличивается, то для сохранения равенства должно понизиться давление.
Следовательно, во время движения судна, чтобы выражение (3) сохранялось, вокруг судна происходит падение давления, а следовательно, и уровня воды (рис.2).

Рис.2
Это и является причиной скоростного проседания судна. Из выражения (3) видно, что чем больше скорость потока, движущегося вдоль корпуса судна, тем больше падает давление, и тем значительнее проседание судна.
Поле вызванных скоростей не симметрично относительно миделя, следовательно, не симметрично и поле давления воды вдоль движущегося судна (рис.2). В носовой части формируется поле повышенного давления за счет лобового сопротивления формы корпуса, замедляющего набегающий поток. В кормовой части замедление потока, огибающего судно, (а следовательно, и повышение давления) происходит за счет влияния “попутного потока”, движущегося вместе с судном. Однако, работа винта, создающего дополнительное разряжение воды у кормовой оконечности, существенно влияет на результирующую величину поля давлений.
Участки повышенного давления в носовой и кормовой оконечностях имеют разную природу и разные величины, зависящие от многих параметров погруженной части корпуса. Несимметричность поля давления вдоль корпуса приводит к тому, что скоростное проседание происходит с изменением дифферента судна. Для большинства судов, имеющих обычную конфигурацию корпуса (без носового бульба), характерно проседание с дифферентом на корму.
Скоростное проседание с дифферентом на нос характерно для крупнотоннажных судов. Результаты натурных испытаний показывают, что у судов с коэффициентом общей полноты Св > 0.8 проседание носовой оконечностью больше, чем кормовой.
При выходе судна на мелководье скоростное проседание увеличивается в сравнении с проседанием на глубокой воде. Причин тому несколько. Одной из причин является меняющаяся картина волнообразования (рис.3). В общем случае движущееся судно образует две системы волн: поперечную, распространяющуюся перпендикулярно диаметральной плоскости судна, и систему волн, образующую сектор (рис.3, а).
Ширина волнового сектора зависит от значения Fr. На мелководье, по мере приближения скорости судна к критическому значению, угол между ДП судна и фронтом расходящихся волн увеличивается. При достижении скорости судна значения, близкого к критическому (Fr 1), обе системы волн вырождаются в две поперечные волны - носовую и кормовую (рис.3, б)
 Рис.3
Рис.3
Образовавшиеся поперечные волны имеют значительную амплитуду. У судов с обычными обводами корпуса носовая волна располагается под носовой оконечностью, а кормовая волна - несколько позади кормовой оконечности. Это приводит к тому, что носовая оконечность всплывает на волне с увеличением дифферента на корму.
Другой причиной дополнительного проседания судна на мелководье является малый запас воды под килем. Как уже говорилось, частицы воды, огибающие корпус, движутся с большей скоростью, образуя поле вызванных скоростей (встречный поток). Если поле вызванных скоростей достигает грунта, то там возникает пограничный слой, где силы трения притормаживают встречный поток воды (рис. 4).

Рис.4
Но для того, чтобы то же количество воды успевало проходить под днищем, скорость потока увеличивается. А увеличение скорости потока под днищем приводит к дополнительному падению давления в этом районе, что и приводит к дополнительному проседанию корпуса.
При движении судна на мелководье с ограниченной акваторией (в узкости) на поле вызванных скоростей оказывают влияние не только дно, но и стенки канала. В результате этого воздействия перепады поля давлений вокруг судна имеют большую амплитуду, чем в условиях неограниченной акватории. Дополнительное падение давления приводит к дополнительному проседанию.
Четкой границы между мелководьем с неограниченной и ограниченной акваторией нет. Дополнительным параметром при оценке поведения судна в мелководном канале служит отношение к / , где к - площадь поперечного сечения канала, а - площадь поперечного сечения погруженной части мидель-шпангоута. Ощутимое влияние узкости на проседание начинает сказываться при к / < 12 .
Наличие крена у судна увеличивает его осадку (рис.12)
Рис.12.
Величина крена зависит как от ширины судна, так и от угла крена. Поскольку подводная часть корпуса судна имеет сложную конфигурацию, и любое накренение нарушает симметрию погруженной части относительно диаметральной плоскости, то использование простых формул для расчета дополнительного проседания возможно лишь на небольших углах крена, когда эта несимметричность не приводит к существенным погрешностям.
В Наставлениях НШС-82 (НШСР-86) увеличение осадки судна при углах крена < 10о рекомендуется определять (в метрах) из выражения:
|
|
(23) |

Следует помнить, что отсутствие статического крена не дает основания пренебрегать этой величиной, т.к. у судна может в любой момент появиться динамический крен в результате воздействия ветра или волн.
Кроме того, динамический крен будет иметь место при маневрировании судна, что следует учитывать при движении по криволинейному фарватеру. В этом случае приближенный расчет дополнительного проседания от динамического крена можно произвести на основании того, что на установившейся циркуляции наступает равенство моментов кренящего Мкр и восстанавливающего Мв [4]:

где - водоизмещение судна, кг;
Vц - скорость судна на циркуляции, м/с;
g - ускорение свободного падения, 9.81 м/с2;
Rц - радиус циркуляции, м;
Zg = (Zm - ho ) - возвышение центра тяжести над основной плоскостью, м;
Zm - возвышение метацентра над основной плоскостью, м;
ho - начальная метацентрическая высота, м.
Выразив угол из (24) и подставив его в (23) можно получить формулу для приближенного вычисления ожидаемого приращения осадки от динамического крена, если известны: начальная метацентрическая высота, радиус кривизны фарватера и предстоящая скорость движения:
|
|

На быстроходных
судах. Когда скорость в м/с не превышает
 (g
– ускорение свободного падения, равное
9,81 м/с2.
L
– длина между перпендикулярами), элементы
циркуляции возрастают с дальнейшим
ростом скорости.
(g
– ускорение свободного падения, равное
9,81 м/с2.
L
– длина между перпендикулярами), элементы
циркуляции возрастают с дальнейшим
ростом скорости.
Загруженность судна (соответственно его водоизмещение и осадка) также естественным образом влияют на манёвренные его характеристики.
Судовые радиопеленгаторы. Радиопеленгование. Определение места. Оценка точности.
Радиопеленгатор представляет собой радиотехническое устройство, которое позволяет использовать свойства распространения радиоволн для определения направления их прихода.
По методу определения радиопеленга существующие судовые радиопеленгаторы подразделяют на два типа:
слуховые, в которых направление на радиомаяк определяется по минимуму слышимости радиосигнала;
визуальные, в которых направление определяется по расположению характерной развертки на электронно-лучевой трубке.
Для определения места судна с помощью судовых радиопеленгаторов в основном используются морские радиомаяки кругового излучения, расположение которых показано на морских навигационных картах. Для их работы выделен специальный диапазон частот 285— 320 кГц (λ = 1050/920 м). Мощность радиоизлучения морских радиомаяков находится в пределах 50—250 Вт, а эффективная дальность использования днем до 175 миль. Передача радиосигналов радиомаяками осуществляется автоматически.
Для удобства использования они объединяются в навигационные группы по 2—6 маяков, которые работают на одной частоте по единому расписанию.
В слуховых радиопеленгаторах рамочная антенна подключена к специальному гониометрическому устройству, которое позволяет по минимуму слышимости радиосигнала определить направление на радиомаяк.
В визуальных радиопеленгаторах применен двухканальный радиоприемник, подключенный к двум взаимно перпендикулярным рамочным антеннам. В качестве индикатора направления используется электронно-лучевая трубка, на две пары отклоняющих пластин которой подаются сигналы от разных рамочных антенн. По характеру и расположению развертки определяется направление прихода радиоволны.
Слуховой и визуальный радиопеленгаторы позволяют определить направление на радиомаяк в виде отсчета радиокурсового угла (ОРКУ) по неподвижной шкале и в виде отсчета радиопеленга (ОРП) по шкале, соединенной с гирокомпасом.
Счет радиокурсовых углов ведется от диаметральной плоскости судна по направлению движения часовой стрелки в пределах 0—360°.
Таким образом, определение пеленга на радиомаяк судовым радиопеленгатором осуществляется по направлению прихода фронта радиоволны. Однако радиосигнал воздействует не только на рамочную антенну пеленгатора, но и на металлические конструкции корпуса судна, которые в результате этого становятся источниками «вторичного» излучения электромагнитной энергии.
Отклонение фронта электромагнитной волны от истинного направления под влиянием «вторичных» излучений металлических конструкций корпуса судна называется радиодевиацией.
Расположение всех вторичных излучателей на судне по отношению к рамочной антенне радиопеленгатора сохраняется неизменным, в то время как курсовые углы прихода радиоволны могут меняться в пределах 0—360°.
Следовательно, радиодевиация будет зависеть от радиокурсового угла на радиомаяк.
Уничтожение радиодевиации производится с помощью специального компенсирующего устройства — радиопеленгатора. Эта работа завершается определением остаточной радиодевиации, значение которой не должно превышать 4°.
Корректура морских карт и пособий. Системы ВСРНП и НАВТЕКС.
Судовая коллекция карт и руководств для плавания делится на три группы:
Первая группа включает комплекты карт и руководств для плавания, предназначенные для обеспечения плавания:
- по судоходной линии, на которой закреплено судно, традиционные районы промысла;
- между определёнными портами, а для нелинейных судов в соответствии с очередным рейсовым заданием. К первой группе относятся также каталоги карт и книги.
Вторая группа включает карты, и руководства для плавания, которые могут быть использованы в предстоящем плавании в случаях отклонения судна от намеченного пути, непредвиденного захода в порт-убежище и т.д.
Третья группа включает все остальные карты и руководства для плавания, входящие в судовую коллекцию.
Комплекты первой группы корректируются с получением ИМ и других корректурных документов. Корректура их должна быть закончена до выхода в рейс.
Если стоянка в порту кратковременная и корректуру невозможно выполнить до выхода судна в рейс, разрешается, по усмотрению капитана, производить корректуру раздельно, по этапам перехода. До выхода из порта необходимо закончить корректуру в таком объёме, чтобы обеспечить плавание судна не менее чем на первые трое суток. Корректура остальных карт первой группы выполняется на переходе и во время стоянки в промежуточных портах.
Комплекты второй группы корректируется после завершения корректуры первой группы. Комплекты третьей группы на судне в рейсе, как правило, не корректируются, однако корректурный материал для них систематизируется в последовательности его поступления, хранится на и используется по необходимости при изменении рейсового задания.
На судах рыбной промышленности в период меж рейсовых стоянок корректуру карт и руководств для плавания производят, как правило, ЭРНК по заявке, подаваемой капитаном судна.
По своему характеру Извещения Мореплавателям подразделяются на постоянные, временные и предварительные.
Постоянные ИМ содержат сведения о навигационной обстановке, не подвергающейся частым изменениям.
Временные ИМ содержат сведения о непродолжительных изменениях в навигационной обстановке. В тексте, которых указан срок их действия, автоматически утрачивают своё значение по истечении указанного срока.
Предварительные ИМ содержат сведения о наиболее важных предполагаемых или планируемых в ближайшее время изменений в навигационной обстановке.
Корректуру карт следует начинать с последнего номера ИМ и выполнять её в последовательности убывания номеров.
Из карт, подобранных на предстоящий рейс, в первую очередь корректируются наиболее крупного масштаба.
Корректура на картах выполняется следующим образом:
- по постоянным ИМ новые данные наносятся красной тушью (чернилами) чертёжным пером; прежние перечёркиваются крестиком, а текстовая часть зачёркивается тонкой линией.
- по временным и предварительным ИМ, а также по НАВИП корректура карт выполняется аналогично, но простым карандашом.
Корректура карт первой группы по радионавигационным сообщениям выполняется немедленно.
(ВСРНП) Всемирная служба радионавигационных предупреждений.
В рамках ВСРНП передаются три вида навигационных предупреждений – районные, прибрежные и местные.
Навигационные предупреждения в рамках ВСРНП обеспечивают мореплавателей всех стран навигационной информацией на английском языке.
NAVTEX:
НАВТЕКС - международная автоматизированная система передачи в режиме узкополосного буквопечатания навигационной, метеорологической и другой срочной информации, относящейся к прибрежным водам в радиусе до 400 миль от берега. В отличие от предупреждений НАВАРЕА, НАВТЕКС обеспечивает передачу метеорологических прогнозов и всех штормовых предупреждений. НАВТЕКС (навигационный телекс) - это международная автоматизированная система передачи навигационных и метеорологических предупреждений и срочной информации.
Служба НАВТЕКС использует специально выделенную для этих целей частоту 518кГц, на которой береговые станции передают информацию на английском языке, распределив, во избежание взаимных помех, время работы каждой станции по расписанию.
НАВТЕКС является компонентом Всемирной службы навигационных предупреждений (ВСКП), принятой Резолюцией Ассамблеи А.419(Х1), и входит в состав ГМССБ.
Содержание информации о маневренных характеристиках судна согласно требованиям ИМО. Лоцманская карточка.
Информация о маневренных характеристиках судна в соответствии с резолюцией ИМО А.601(15) «Требования к отображению маневренной информации на судах» должна быть представлена в виде:
• лоцманской карточки;
• таблицы маневренных характеристик (для рулевой рубки);
• формуляра маневренных элементов.
В информацию о маневренных характеристиках должны вноситься все изменения после модернизации или переоборудования судна, в результате которых могут измениться маневренные характеристики или наибольшие размерения судна.
Полностью маневренные свойства судна описываются двумя видами характеристик:
инерционно-тормозными;
поворотливости. Перечень необходимых характеристик, которые должны бить на каждом судне, определяются Рекомендациями по организации штурманской службы па судах (РШС), которые учитывают требования Международной морской организации (ИМО).
В соответствии с рекомендациями на каждом морском судне должны быть данные:
значения пути и времени торможения задним полным ходом и дня режима "стоп",для всех режимов переднего хода. для состояния в грузу к в балласте;
- кривые циркуляции при перекладке руля на 15 и 35 градусов для состояния в грузу и в балласте.
Однако указанные характеристики не полностью описывают маневренные свойства.
Полностью инерционные свойства судна характеризуют данные о времени остановки судна а пути, проходимом при этом, для всех сочетаний режима движения вперед и торможения. Разнообразие состояний судна во время эксплуатации не позволяет определять характеристики для всех значений водоизмещения, поэтому маневренные характеристики определяются только для состояния, которое судно имеет при выполнении сдаточных испытании, а для других - производится пересчет.
Лоцманская карточка, подлежащая заполнению капитаном, предназначена для предоставления информации лоцману, принимающему судно под проводку. Эта информация должна дать представление о состоянии судна в период проводки в части загрузки, двигателей и движителей, рулевого и подруливающего устройства и другого соответствующего оборудования. Для заполнения лоцманской карточки проведение специальных ходовых испытаний не требуется.
Аварийная папка
Документация, нужная для руководства борьбой за живучесть, комплектуется в аварийной папке. Второй комплект документации хранится в доступном месте, известном руководству судна.
Типовой список содержания Аварийной папки.
1. Судовая роль и список пассажиров;
2. Схема судовых помещений (по палубам) и их нумерация. Ответственные за помещения и фамилии проживающих в них;
3. Схема путей эвакуации для каждой палубы;
4. Конструктивный чертёж судна с указанием координат основных помещений и номеров шпангоутов;
5. Расписание по тревогам, а также распределение пассажиров по шлюпкам;
6. Оперативный план;
7. План грузов с указанием свойств перевозимого груза. При перевозке опасных грузов - отдельный план грузов с указанием свойств груза, способы тушения и рекомендации первой помощи;
8. Схема расположения танков с указанием их названий, ёмкости, площадей и координат центров;
9. Табличка зависимости объёма каждого танка от уровня в них;
10. Информация по аварийной посадке и остойчивости с приложением необходимых чертежей;
11. Копии бланков расчёта остойчивости для расчёта статической и динамической остойчивости;
12. Таблица влияния свободных поверхностей в танках и грузовых помещениях на остойчивость;
13. Схема конструктивной противопожарной защиты с выделением более опасных в пожарном отношении помещений и помещений, защищённых объёмным тушением, а также с указанием станций пожаротушений;
14. Схема противопожарной, водяной и осушительной систем с указанием расположения пожарных рожков (кранов) и насосов и их производительности;
15. Схема (список) расположения огнетушителей, ящиков с песком и других средств борьбы с пожаром;
16. Схема (список) расположения аварийного имущества и снабжения, в том числе, международных переходных соединений с берегом;
17. Схема расположения спасательных средств с указанием их вместимости (также спасательных кругов);
18. Таблица балластировки с диаграммой изменения осадок носом и кормой;
19. Схема забортных отверстий;
20. Схема возможных аварийных вырезов;
21. Схема расположения пожарных сигнализаторов;
22. Подробный список всех вентиляционных отверстий и других закрытий с указанием их номеров;
23. Схема расположения быстро закрываемых клапанов дистанционного управления;
24. Отраслевой стандарт "Морские суда. Сигнальные цвета и знаки безопасности"
Определение места судна по двум и трем пеленгам. Оценка точности.
Определение места судна по трем пеленгам.
При этом способе можно получить большую точность. В быстрой последовательности один за другим берут пеленги на предметы (ориентиры). Первым следует брать пеленг ориентира, который ближе к ДП судна. Углы между пеленгами должны быть ближе к 60 или 120 градусам. Для получения обсервованного места судна достаточно иметь две линии положения. Третий пеленг используется как контрольный. Контрольная линия положения позволяет решить целый ряд задач: избежать промаха при взятии отсчетов по компасу, обнаружить и устранить влияние ошибки в DК. Исправляют пеленги поправкой компаса и прокладывают на карте.
Обсервованное место, принимают в точке пересечения линий пеленгов. Три линии положения на карте пересекаются в одной точке только в том случае, если наблюдения, вычисления и прокладка не содержали ошибок. На практике линии пеленгов образуют треугольник, называемый треугольником погрешности.
Пеленги по этому способу обычно не пересекаются в одной точке, а образуют треугольник погрешности.
Причины:
1) Промахи во время отсчета и исправлении пеленгов;
2) Ошибка в опознании ориентиров;
3) Случайные ошибки в пеленговании и прокладке пеленгов на карте;
4) Ошибки от не одновременности взятия пеленгов;
5) Ошибки в поправке компаса.
Разгонка треугольника погрешностей:
изменив поправку компаса на 2 – 4 градуса в ту или другую сторону и проложив на карте исправленные пеленги, можно получить новый треугольник погрешности, подобный первому. Соединив сходные вершины на пересечении получают искомое место судна. К разгонке прибегают, если величина сторон треугольника > 5мм в масштабе карты. Если меньше, то для равностороннего треугольника место – в центре, для вытянутого – ближе к его коротким сторонам.
Определение места судна по 2-м пеленгам.
Практическое выполнение заключается в подборе двух ориентиров с расчетом, чтобы угол между направлениями на них был по возможности близким к 90 градусам но, не меньше 30 и не больше 150. Берут по компасу пеленги ориентиров. Время и ОЛ замечают в момент вторых наблюдения. Компасные пеленги исправляют поправкой компаса в истинные и прокладывают на карте. Обсервованное место получают в пересечении линий истинных пеленгов. Первым пеленгуют ориентир который ближе к диаметральной плоскости судна. При скорости > 15 узлов измеренные пеленги надо приводить к одному моменту. Для этого берут КП первого ориентира, затем второго, после чего вновь пеленгуют первый ориентир. Значения осредняют, приводя тем самым средний пеленг к моменту пеленгования второго ориентира:
ОКП1 = (ОКП1 + ОКП2) : 2.
Время и ОЛ замечают при взятии второго пеленга. Точность зависит от случайных ошибок при пеленговании, а также от ошибок в принятой поправке компаса. Влияние их будет меньшим, когда угол между пеленгами равен или близок 90 градусам
Дрейф судна. Влияние ветра и течения на управление судном.
Дрейф судна - смещение движущегося судна с линии заданного курса под воздействием ветра и волн. Д. с. характеризуется углом дрейфа (между продольной осью судна и направлением его действительного перемещения). Д. с. учитывают при счислении пути судна.
При воздействии на судно ветра фактическое направление движения судна относительно воды происходит по путевому углу ПУα при дрейфе. При ветре в левый борт линия пути судна смещается вправо, в этом случае угол дрейфа α имеет знак плюс, при смещении судна влево (ветер в правый борт) - минус.
Связь между ИК, ПУα и α следующая: ПУα = ИК ± αл/бпр/б ;
Соединив серию из трёх или четырёх обсерваций, полученных достаточно точными методами, на карте получают линию пути, откуда определяют величину угла α= ПУα – ИК.
Каждое судно подвержено действию ветра в разной степени. В зависимости от направления и силы ветра меняется управление судном и его маневренные качества. Часто не только малое, по и большое судно не может противостоять ветру ни рулем, ни работой винта, оно не может удержаться на якоре, подойти к причалу или отойти от него. С изменением силы и направления ветра меняется путь и скорость судна. Действие ветра на судно зависит от его силы и направления, от общей площади подводной части, от парусности судна, его осадки и водоизмещения.
Течение оказывает большое влияние на управление и маневренные элементы судна относительно грунта (берегов)
При ходе против течения судно хорошо слушается руля, уменьшается инерция судна и его легче остановить. Сложнее управлять рулем на поворотах судна при попутном течении, при котором судно хуже слушается руля. Следовательно, при движении вниз по течению труднее выполнять различные маневры. С увеличением скорости течения увеличивается расстояние, необходимое для поворота судна, идущего вниз, так как удлиняется и искажается кривая циркуляции, если ее рисовать относительно берега.
Лучшие условия управления судном и, в частности, его остановкой при движении против течения используются судоводителями при подходе к причалу и швартовке, т. е. судно, идущее по течению, подходит к причалу или берегу после разворота ниже причала на обратный курс.
Особенно неприятны свальные течения, проходящие под углом к основному потоку, так как они вызывают резкое смещение судна с избранного курса (снос с курса). Подобно свальному течению действует поток (течение) в относительно спокойной реке, водохранилище, озере, в море, например в местах впадения притоков, речек, при сгонно-нагонных явлениях. Наибольший снос испытывает судно при следовании бортом к течению. Направление и скорость течения могут непрерывно меняться от действия приливов, отливов, ветра, особенно в устьях и на берегах рек, а также за различными мысами и островами.
Чтобы предупредить снос судна течением с курса, можно переложить руль и уклониться по направлению на это течение. Тогда судно пойдет по направлению равнодействующей скорости течения и своего хода. Угол поправки на течение определяют глазомерно по наблюдению за береговыми и плавучими знаками.
Электронные карты (ENC) и информационные картографические системы ECDIS. Требования ИМО. Особенности навигационного оборудования судов, управляемых с мостика одним человеком.
Электронная карта должна отображать следующий минимум картографических данных: контур береговой линии, глубины и высоты, безопасные границы по глубине, подводные препятствия, стационарные и плавучие навигационные средства, морские пути (фарватеры, каналы, рекомендованные курсы, системы разделения движения судов), запретные и ограниченные для плавания районы, числовой и линейный масштабы отображаемой карты, значения ограничивающих карту координат и, как минимум, по одной промежуточной линии, обозначающей параллель и меридиан. Кроме того, по желанию судоводителя на экране могут отображаться другие картографические данные из перечня, определенного эксплуатационными требованиями ИМО к ECDIS, например, справочные данные о береговых и плавучих средствах навигационного обеспечения, правила плавания, различные предупреждения навигационного характера, пути движения паромов, подводные трассы кабелей и трубопроводов, геодезическая информация (геодезическая основа, дата создания и дата последней корректуры электронной карты) и пр.
Электронно-картографические навигационные информационные системы (ЭКНИС) – одно из наиболее эффективных навигационных средств, автоматизирующих процесс судовождения, обеспечивая штурмана полной информацией от всех подключенных навигационных датчиков на электронной карте. Совмещение всей информации на одном дисплее позволяет оценить обстановку и принять решение в кратчайшее время. Большое количество функциональных возможностей ЭКНИС позволяет существенно экономить ходовое время и эксплуатационные расходы.
Названный стандарт ИМО содержит требования к точности текущего места судна в зависимости от его скорости и расстояния до ближайшей опасности независимо от средств и способов, обеспечивающих эту требуемую точность. Под навигационной опасностью подразумеваются нанесенные на карту или обнаруженные препятствия и несудоходные глубины, а также границы опасных и запретных районов.
В стандарте ИМО плавание подразделяется на две фазы: — акватории портов и подходы к ним, включая все районы, где затруднено маневрирование судна; — другие районы.
Граница между этими видами плавания четко не определяется и зависит от конкретных условий.
При плавании в стесненных условиях требования к точности судовождения не нормируются, а ставятся в зависимости от местных условий. При плавании в других районах со скоростью до 30 узлов текущее место судна должно быть известно с погрешностью не более 4 % расстояния до ближайшей опасности, но не более 4 миль. При этом точность места должна оцениваться вероятностно 95 %-ной фигурой погрешностей с учетом случайных и систематических погрешностей.
Счисление пути с учетом дрейфа и течения. Оценка точности.
Во время плавания на судно могут одновременно воздействовать и ветер, и течение. В результате этого воздействия судно будет перемещаться не по линии истинного курса, а по другой линии, отличной от ИК на соответствующий угол суммарного сноса.
Этот угол обозначается буквой С и равен алгебраической сумме угла дрейфа а и сноса β.
С = α + β
Истинный курс, путевой угол и суммарный угол сноса выражаются алгебраической зависимостью:
ИК = ПУ-С,
ПУ = ИК + С,
С = ПУ — ИК
При суммарном сносе, также как и при учете сноса на течении, решается две основных задачи.
Известны: И К, α , скорость судна (Vл ), а также скорость (Vт ) и направление течения. Необходимо узнать ПУиС.
По формуле: ПУα = ИК + α рассчитывается линия пути дрейфа, которая прокладывается на карте (рис. 211). На этой линии откладывается Vл (скорость судна за час) и строится уже известным методом навигационный треугольник. Для этого из точки В по направлению течения в масштабе карты откладывается скорость течения (Vт ) в узлах. Полученная точка С соединяется с начальной точкой А и получается ПУ, на линии которого записываются значения КК, ΔК и С.
Действия при постановке на якорь и съёмке с якоря.
При подходе к якорной стоянке скорость судна должна быть небольшой, чтобы иметь возможность погасить инерцию и не допустить рывка при выходе на канат.
Постановка судна на один якорь. Если в зоне постановки судна на якорь отсутствуют ветер и течение, то подход к якорной стоянке можно производить с любого безопасного направления. При этом в зоне отдачи якоря желательно, чтобы судно имело незначительное движение назад. Для этого заблаговременно производится реверс двигателя на задний ход с таким расчетом, чтобы к моменту выхода судна к месту отдачи якоря оно полностью погасило инерцию поступательного движения вперед. Затем, как только судно тронется назад, отдают якорь и останавливают двигатель. Практикой выработано, что команду на отдачу якоря следует подавать в тот момент, когда кильватерная струя от работающего на задний ход винта дойдет до середины судна.
Первоначально якорная цепь травится без задержки, чтобы она ровно ложилась на грунт по мере движения судна назад. Когда будет вытравлено примерно около двух глубин, якорную цепь задерживают и далее травят небольшими порциями по мере выхода судна на канат до необходимой величины. Следует иметь в виду, что при даче заднего хода с некоторой задержкой на судах с ВФШ правого вращения (или ВРШ левого вращения) корма будет забрасываться влево и с учетом этого, чтобы якорная цепь не пошла под корпус суда, лучше отдавать левый якорь. Однако для равномерного износа якорных цепей рекомендуется, если это не диктуется какими-либо другими условиями, становиться поочередно то на левый, то на правый якоря. Чтобы при постановке на правый якорь не допустить навала носа судна на якорную цепь, необходимо переложить руль лево на борт, пока судно еще движется вперед, а когда нос судна тронется влево, дать задний ход.
При благоприятных условиях погоды на малых глубинах до 25-30 м рекомендуется вытравливать якорную цепь на длину, равную примерно 5-6 глубинам в месте отдачи якоря, на средних глубинах от 25-30 м до 50 м - - на длину, равную 3-4 глубинам, а на больших глубинах более 50 м - - сколько получится, но не менее 2 глубин.
Съемке с якоря предшествует подготовительная работа. Она заключается в том, что СЭУ и рулевое устройство готовят к работе. Для этого по разрешению с мостика производят опробование на холостом ход рулевой машины и делают пробный пуск двигателя. Об их готовности старший (главный) механик докладывает на мостик. Проверяется работа телефона и звуко-сигнальных средств, снимаются показания часов и сверяется машинный телеграф на мостике и в ЦПУ. Заказывается питание (ток, пар) на брашпиль и вода для обмыва якорной цепи и якоря. Вызывают на бак третьего помощника капитана, боцмана и матроса. Под руководством помощника капитана готовят якорное устройство. Производят внешний осмотр брашпиля, поворачивают на холостой ход, убеждаются в исправности его работы, проверяют наличие воды в пожарной магистрали, соединяют механизм брашпиля со звездочкой. О готовности судна к съемке с якоря старший помощник докладывает капитану. По команде с мостика на бак «Вира якорь» боцман ослабляет ленточный стопор и приводит в работу брашпиль.
Помощник капитана, руководящий выборкой якоря, контролирует состояние выходящей из воды якорной цепи и постоянно докладывает по УКВ или телефону на мостик о ее направлении, натяжении. Боцман, управляя брашпилем, сообщает ударами в рынду прохождение очередной смычки. Количество ударов в рынду указывает, сколько смычек прошло через брашпиль. Помощник капитана также сообщает на мостик прохождение количества смычек. Матрос следит за правильностью укладки якорной цепи в цепной ящик, при необходимости дополнительно промывает ее в якорном клюзе из шланга. Когда якорная цепь займет вертикальное положение — «панер», т. е. такое положение, когда начнет подниматься шток якоря (рис.), дают сигнал рындой (частые удары). «Якорь встал» — это момент отрыва якоря от грунта и. переход судна из состояния «на якоре» в состояние «на ходу». Спускают якорный шар или выключают якорные огни и освещение палубы и включают ходовые огни. При благоприятных условиях погоды и окружающей обстановке, пока якорь не вышел из воды, ход
судну давать не следует, так как якорь может оказаться «нечист» О прохождении смычек и состоянии
якоря помощник капитана докладывает на мостик, в том числе и что «якорь вышел из воды, чист»
или «якорь нечист». После выхода «чистого якоря» из воды его хорошо промывают и поднимают на место, сообщают об этом на мостик тремя четкими ударами в рынду и словами «Якорь на месте». При съемке с якоря на волнении, когда нос судна резко и высоко поднимается и опускается, существует опасность обрыва якорной цепи. Чтобы якорная цепь не оборвалась, подрабатывают машиной самым малым ходом вперед и при необходимости «подрывают» якорь.
Технические характеристики судовой РЛС. Использование РЛС в навигационных целях. Определение места. Оценка точности.
Судовые радиолокационные станции (РЛС) позволяют измерять направления и расстояния до окружающих объектов в условиях плохой видимости. Благодаря этим свойствам РЛС широко используется для определения места судна, обеспечения плавания в узкости и расхождения с другими судами.
В навигационных РЛС используются радиоволны сантиметрового диапазона, которые распространяются и отражаются по законам, близ» ким к законам оптики.
В отличие от световых
волн они больше подвержены рефракции
и дифракции. Благодаря этим особенностям
радиоволн дальность радиолокационного
горизонта при стандартном состоянии
атмосферы примерно на 15 % больше дальности
видимого горизонта и рассчитывается
по формуле
 (1)
(1)
где Dp — дальность радиолокационного горизонта, мили; h — высота антенны РЛС над уровнем моря, м.
Максимальная
дальность радиолокационного обнаружения
объектов определяется по формуле
 (2)
(2)
где Н — высота объекта, м.
Объект будет обнаружен лишь в том случае, если на вход приемника РЛС поступит отраженный сигнал, превышающий по мощности порог его чувствительности.
Количество энергии, которое в состоянии отразить в направлении антенны объект, зависит от его размера, формы, электрических свойств и характера поверхности. По этим причинам часть объектов, находящихся в пределах радиолокационной дальности, рассчитанной по формуле (2), не будет обнаружена на экране радиолокатора.
Особенности распространения и отражения радиоволн, ограниченность разрешающей способности РЛС, воспроизведение окружающей обстановки на плоскости с незначительной градацией по яркости эхо-сигналов, приводят к тому, что изображение на экране имеет существенные различия и с картой, и с местностью.
Необходимый опыт использования РЛС приобретается систематическим изучением побережья в радиолокационном отношении. С этой целью в условиях хорошей видимости сопоставляют изображение на экране РЛС с картой и местностью. Детали рельефа берега, дающие четкие эхо-сигналы, выделяют на карте цветными карандашами или специальной штриховкой. Часто прибегают к фотографированию экрана РЛС или зарисовкам изображения с него, фиксируя место судна на карте.
Практика использования радиолокационных станций в судовождении позволяет привести ряд общих рекомендаций по чтению изображения на экране.
Берег. При подходе к побережью с моря на экране радиолокатора появляются сначала отдельные отметки эхо-сигналов от деталей рельефа, распознать которые на карте бывает очень трудно. По мере сокращения расстояния количество отметок растет и, наконец, образуется слитная протяженная отметка, чередующаяся с затененными участками. В этих условиях холмистый рельеф образует изображение в виде световых пятен и затененных участков.
Обрывистые берега дают изображение в виде четкой слитной отметки, ближайшая кромка которой довольно точно копирует соответствующий участок карты.
Если берег полого опускается к воде, то береговая черта плохо различается на экране или же вообще не обнаруживается.
Низкие песчаные берега, песчаные пляжи и острова обнаруживаются на малых расстояниях и дают изображения своих кромок в виде тонких прерывистых линий или в виде бесформенных отметок от неровностей рельефа.
Искусственные сооружения. Береговые сооружения, как правило, обладают хорошими отражающими способностями и поэтому первыми обнаруживаются при подходе к берегу. Четкие ровные кромки эхо-сигналов на малых расстояниях позволяют распознавать на экране отдельные детали сооружений. Хорошо распознаются кварталы строений, мосты, пирсы, причальные стенки, волноломы, башенные краны, металлические фермы и нефтебаки. Искусственные каналы и устья рек обнаруживаются лишь в том случае, если угловая ширина входа превышает разрешающую способность РЛС по углу.
Небольшие объекты. Форма эхо-сигналов от объектов малой протяженности зависит только от характеристик самой РЛС. Объясняется это тем, что размеры небольших объектов в масштабе изображения оказываются меньше, чем площадь минимального разрешения. Такие небольшие объекты принято называть точечными. К ним относятся мелкие плавучие средства, буи, бакены, навигационные знаки, подобные им сооружения или естественные объекты.
При нахождении точечного объекта на малом удалении от судна эхо-сигнал будет иметь радиально вытянутую форму. Это является следствием превышения линейных размеров разрешающей способности по дистанции (РСД) над линейными размерами разрешающей способности по углу (РСУ).
При получении эхо-сигнала от точечного объекта на периферии экрана РЛС он растягивается по дуге, так как в этом случае соотношение линейных размеров РСД и РСУ обратное.
Расчет плавания по ортодромии. Приближенные способы расчета.
Ортодромия (ДБК – дуга большого круга), является кратчайшим расстоянием между двумя точками на земной сфере. Ортодромия АВ обращена выпуклостью к ближайшему полюсу и пересекает меридианы под различными углами, она всегда короче локсодромии или равна ей. В высоких широтах и на больших переходах целесообразно выбирать маршрут по ортодромии. Разность между ортодромией и локсодромией можно получить по формулам:

Для нанесения на меркаторскую карту ДБК используют уравнение ортодромии:
 ,
где
,
где
о – долота точки пересечения экватора ортодромией;
Ко – угол между меридианом и ортодромией в точке пересечения экватора;
i, i – текущие координаты.
Задаваясь долготой i, получают широту i точки на заданном меридиане. Значения Ко и о вычисляются предварительно:

Важным параметром ортодромии является направление ортодромии в начальной точке:
 .
.
Плавание экономически
выгоднее совершать не по касательным
к ортодромии Кн,
а по хордам. Угол между касательной и
хордой будет равен ортодромической
поправке .
Следовательно, общий принцип расчёта
плавания по ортодромии состоит в расчёте
начального курса Кн,
выборе
отрезка плавания S
для и получения истинного курса: ИК = Кн
+ .
и получения истинного курса: ИК = Кн
+ .
Расчёт начального
курса может быть выполнен с использованием
таблицы ортодромических поправок. Для
этого на мелкомасштабной карте соединяют
точки А и В, снимают значение
локсодромического курса, выбирают из
таблицы 23-б МТ-75 угол общ
и вычисляют Кн
= ЛокК1
- общ.
Пользуясь таким приёмом, ортодромию
можно нанести на карту, повторяя
вычисления для двух, трёх и более точек.
Для сокращения расчётов изжаются карты
в гномонической проекции, на которых
ортодромия изображается прямой линией.
Соединяя начальную и конечную точки,
получают ортодромию, координаты которой
затем переносят на меркаторскую карту.
На гномонических картах имеются таблицы
и номограммы для расчёта длины ортодромии
и начального курса.
Швартовка судна к причалу и отшвартовка
Швартовка бортом
к причалу.
Если при подходе к причалу судно имеет
поступательное движение, то первое
касание безопаснее выполнять скулой,
одновременно придав небольшое вращательное
движение носовой части в сторону от
причала. Сумма векторов скоростей
поступательного Vп
и вращательного
Vр
движений образует результирующий вектор
скорости Vp,
направленный вдоль причала. Скорость
Vp
гасят работой машины на задний ход.
При подходе к причалу судно должно иметь минимальное движение вперед, позволяющее в нужный момент остановиться с помощью машины и якорей. В морской практике принято, что скорость сближения с причалом для крупных судов не должна превышать 5— 10 см/с (0,1—0,2 уз), для малых и средних судов 30—40 см/с (0,6—0,8 уз).
Подводят судно под острым углом либо параллельно причалу. Имея ВФШ правого вращения, при швартовке левым бортом подходят к причалу под углом 10—20°. При швартовке правым бортом стремятся подходить параллельно причалу. Если место швартовки ограничено другими судами, подходят к линии причала под более крутым углом, при необходимости используя якорь наружного борта. При свежем отжимном ветре подходят к причалу почти под прямым углом с отдачей якоря. Затем с помощью якоря задерживают движение вперед. Работая машиной и рулем, разворачивают судно параллельно причалу. Подают швартовы, поджимают к стенке и крепят в таком положении.
Швартовка бортом к причалу может выполняться как без отдачи, так и с отдачей якорей. В тихую погоду при достаточном пространстве, позволяющем подходить прямым курсом и затем гасить скорость, якорями можно не пользоваться. Отдача якоря наружного борта с якорь-цепью длиной 1,5—2 глубины и протаскивание его по грунту улучшают управляемость судна, повышают его безопасность в стесненной обстановке, позволяют работать машиной и рулем до сближения с причалом на дистанцию подачи бросательных концов. Иногда якорь и несколько смычек якорь-цепи при швартовке укладывают на грунт, чтобы облегчить отход от причала.
Отход от причала. Если судно отходит от причала самостоятельно, используя главный двигатель, руль, швартовное и якорное устройства, то при расположении судна лагом к причалу стремятся вначале отвести от него корму, придерживая нос шпрингом и помогая развороту носовым продольным. Затем отводят нос и маневрируют для выхода из порта.
При отходе от причала при стоянке у него кормой вначале слегка потравливают якорь-цепи, чтобы ослабить напряжение кормовых швартовов. Затем отдают их и выбирают Подбирают обе якорь-цепи, затем разобщают одну звездочку брашпиля и выбирают каждый якорь отдельно. Во вторую очередь поднимают якорь со стороны действия результирующей внешних сил (ветра и течения).
Средства автоматизированной прокладки (САРП). Требования ИМО.
Современные САРП по конструкции разделяются на 2 основных типа:
системы с автономным индикатором, подключаемым к штатной судовой РЛС;
системы, являющиеся составной частью штатной судовой РЛС, с общим индикатором кругового обзора.
Общим для всех САРП является использование цифровой вычислительной техники для обработки поступающих радиолокационных данных и отображение результата обработки на индикаторе кругового обзора в форме векторов, символов, охранных зон, отметок прошлого движения целей и других обозначений.
Эксплуатационные требования.
Требования по точности определены для следующих параметров: относительный курс, относительная скорость цели, расстояние до точки кратчайшего сближения, время выхода в точку кратчайшего сближения, истинные курс и скорость цели.
Требования отнесены к четырем типовым сценариям, охватывающим различные ситуации встречи. При скоростях судна 10-25 уз, относительной скорости цели в пределах 10-20 уз, дистанции до цели от 1 до 8 миль вектор относительной скорости должен определяться с погрешностью по направлению, не превышающей 5 0 на величине 1 узел. Расстояние до точки кратчайшего сближения должно вычисляться с погрешность не более 0,7 милей, а время выхода в эту точку – с погрешностью до 1 минуты.
САРП , как любая система, является только средством судовождения и как всякое средство имеет свои ограничения ( включая ограничения датчиков информации ). Поэтому чрезмерное доверие к САРП без надлежащих знаний, заложенных в систему принципов и правил эксплуатации
Аналитическое счисление и его автоматизация.
ФОРМУЛЫ АНАЛИТИЧЕСКОГО СЧИСЛЕНИЯ
При плавании вне видимости берегов, если оно продолжительно и прокладка ведется по карте мелкого масштаба, или при маневрировании, когда бывает затруднительно фиксировать на карте движение корабля, вместо графического счисления рекомендуется вести аналитическое. Для аналитического счисления служат формулы:
РШ= S cos K;
ОТШ=S sin K;
РД=ОТШ sec φср *
РД=РМЧ tg K (**),где
РШ — разность широт, дуг. мин;
OTШ — отшествие, дуг. мин;
РД — разность долгот, дуг. мин;
S- пройденное судном расстояние (плавание), мили;
К — курс судна, град;
PMЧ— разность меридиональных частей параллелей пунктов отхода и прихода, мили;
φср —средняя широта пунктов отхода и прихода, град.
Формула (*) приближенная. При больших плаваниях, когда сделанная судном разность широт велика, или при плавании в высоких широтах, когда ошибка от применения формулы (*) может достичь значительных размеров, надлежит пользоваться точной формулой (**).
Средняя широта пунктов отхода и прихода:
φср = (φ1 + φ2) / 2 (***),
где φ1, φ2 — географические широты пунктов отхода и прихода. Для упрощения расчетов по формулам пользоваться табл.
Правильность выбранных из табл РШ и ОТШ контролировать условиями:
— РШ и ОТШ в отдельности меньше плавания;
— сумма РШ и ОТШ больше плавания, а их разность меньше плавания;
— при курсе 45° ОТШ — РШ;
— при курсе меньше 45° ОТШ меньше РШ;
— при курсе больше 45° ОТШ больше РШ.
Наименования выбранных РШ и ОТШ определяются наименованием той четверти, в которой лежит курс корабля.
Для упрощения расчетов по формуле (*) пользоваться табл. Правильность выбранной из табл. контролировать условиями: — РД всегда больше ОТШ (дуга экватора больше соответ ствующей Дуги параллели); — если φср меньше 60°, то РД меньше двовного ОТШ; — если φср равна 60°, то РД равна двойному ОТШ;
— если φср больше 60°, то РД больше двойного OTШ.
Меридиональные части, соответствующие широтам φ1 и φ2 выбирать из табл.
ПРОСТОЕ АНАЛИТИЧЕСКОЕ СЧИСЛЕНИЕ
Простое аналитическое счисление, применяемое в случае движения из пункта отхода до данного счислимого места одним курсом:
— по ИК к плаванию судна из табл. выбрать PШ и ОТШ;
— к широте пункта отхода φ1 прибавить алгебраически выбранную PШ и получить широту пункта прихода φ2;
— рассчитать φср между пунктом отхода и пунктом прихода;
— по φср и ОТШ из табл. выбрать РД;
— к долготе пункта отхода λ1 прибавить алгебраически вы бранную РД и получить долготу пункта прихода λ2
При больших переходах в высоких широтах:
— по широте пункта отхода и широте пункта прихода из табл. выбрать меридиональные части D1 и D2,
— рассчитать разность меридиональных частей РМЧ=D2 — D1
— поформуле (*) или (**) рассчитать разность долгот РД;
— рассчитать долготу пункта прихода λ2.
Если cудно при плавании пересекает экватор, то:
— при небольшом плавании РД принимать равной ОТШ;
— при большом плавании рассчитывать отдельно РД для северной и южной широт.
Маневры судном и действия экипажа при спасении человека за бортом.
Падение человека за борт
В случае падения человека за борт вахтенный помощник капитана выполняет следующие действия:
- даёт команду рулевому перейти на ручное управление и, в зависимости от сложившейся ситуации и типа судна, начинает выполнение маневра "Человек за бортом" (схема маневрирования приведена),
- бросает спасательный круг;
- возвращается в рулевую рубку, включает сигнал тревоги, контролируя одновременно доклады рулевого о курсе (капитана предупреждать не следует, поскольку по тревоге он сам поднимется на мостик),
- информирует вахтенного механика;
- осуществляет наблюдение за упавшим человеком (за кругом со светодымящим буем).
С приходом капитана на мостик вахтенный помощник:
- объявляет по трансляции номер спускаемой шлюпки,
- выставляет наблюдателей,
- делает оповещение по УКВ для находящихся вблизи судов (если необходимо, запрашивает их помощь), а в случае потери пострадавшего, дает извещение серии "XXX CQ" на 500 кГц;
- подаёт судовым свистком, если это необходимо, три продолжительных звука и повторяет их по мере необходимости (приближение других судов).
- поднимает сигнал "Оскар";
- определяет место судна и передает в радиорубку координаты места падения человека за борт;
- наносит место падения человека на карту и ведет тщательное счисление пути судна на маневренном планшете с укрупненным в 10 раз масштабом, если это необходимо для учета маневрирования,
- в темное время суток включает поисковые прожекторы.
1 Практика показывает, что в зависимости от сложившейся ситуации и типа морского судна используются различные маневры судна "человек за бортом".
2 Эффективность маневров, описание которых приведено ниже, доказана в многочисленных случаях падения человека за борт, включая следующие ситуации,
Ситуация "Немедленное действие".
Падение человека за борт замечено с мостика, и меры принимаются немедленно.
Ситуация "Действие с задержкой".
О падении человека за борт доложил на мостик очевидец, и меры принимаются с некоторой задержкой.
Ситуация "Пропал человек".
На мостик поступило сообщение о том, что "пропал" человек.
Если судно следует
полным ходом вперед, используются три
стандартных маневра 
А. Простой поворот (маневр 270°).
А1 Переложить руль в положение "на борт" (при ситуации "Немедленное действие" только в сторону падения человека).
А2 После отклонения от первоначального курса на 250° переложить руль в положение "прямо" и застопорить машину.
1. Ситуация «Немедленное действие».
.1.1. ПРОСТОЙ ПОВОРОТ приводит морское судно на место бедствия быстрее всего.
.1.2. ПОВОРОТ ВИЛЬЯМСОНА требует большего времени и временно уводит судно дальше от места бедствия.
.1.3. ПОВОРОТ СКАРНОУ не применяется.
2. Ситуация «Действие с задержкой».
.2.1. ПОВОРОТ ВИЛЬЯМСОНА наиболее точно приводит морское судно на место бедствия (Когда судно достигает точки начала маневра, скорость поиска должна быть снижена таким образом, чтобы можно было быстро остановиться).
.2.2. ПОВОРОТ СКАРНОУ
не может быть выполнен эффективно, если
время, прошедшее между обнаружением
бедствия и началом маневра. не известно.
3. Ситуация «Пропал человек».
ПОВОРОТЫ СКАРНОУ и Вильямсона позволяют судну вернуться на свой след. При ПОВОРОТЕ СКАРНОУ путь короче, и поэтому на него тратится меньше времени Когда морское судно после ПОВОРОТА СКАРНОУ легло на обратный курс, точка начала маневра будет находиться приблизительно на расстоянии одного корпуса судна по корме В зависимости от типа судна путь сокращается на расстояние 1—2 мили (см также рисунок).
Поскольку стандартные маневры "человек за бортом" не гарантируют возврата судна на свой след. необходимо регулярно тренироваться в выполнении этих маневров.
Поворот Вильямсона.
1 Переложить руль в положение "на борт" (при ситуации "Немедленное действие" только в сторону падения человека)
2. После отклонения от исходного курса на 60° переложить руль на противоположный борт.
3. Не достигнув 20° до обратного курса, переложить руль в положение "прямо" и затем лечь на обратный курс.

Поворот Скарноу (в ситуации "Немедленное действие" не применяется).
1. Переложить руль в положение "на борт"
2. После отклонения от первоначального курса на 240° переложить руль на противоположный борт.
3. Не достигнув 20° до обратного курса, переложить руль в положение "прямо", чтобы судно затем легло на обратный курс.
Радиолокационные маяки-ответчики типа «РАКОН». Радиолокационные буи-ответчики САРТ.
радиолокационный маяк - ответчик (ракон)- приемно-передающее устройство, связанное с фиксированной навигационной отметкой, которое при приеме сигнала от радара автоматически передает отличительный сигнал, который может быть воспроизведен на экране запрашивающего радара, обеспечивая получение данных о расстоянии, пеленге и опознавании;
Радиолокационный спасательный ответчик (англ. SART, Search and rescue radar transponder) — радиоэлектронное устройство, приемопередатчик, являющийся частью Глобальной морской системы связи при бедствии (ГМССБ). Обеспечивает определение местоположения объектов, которые терпят бедствие, путем передачи сигналов радиолокационным станциям.
Используется для ближнего, в пределах 8 морских миль, наведения спасательных служб. Приемопередатчик работает на частоте 9 ГГц. Включается в работу в ручном режиме. При облучении передатчика радаром выдает на дисплее радара сигнал, легко поддающийся идентификации и показывающий пеленг на него.
Согласно требованию конвенции СОЛАС на судах валовой вместимостью до 300 тонн, ответчик не требуется, от 300 до 500 тонн должен быть как минимум один радиолокационный ответчик, на судах свыше 500 тонн — как минимум два.
Несение ходовой навигационной вахты.
Вахтенный помощник капитана должен:
нести вахту на ходовом мостике;
не оставлять мостик ни при каких обстоятельствах без должной замены.
продолжать нести ответственность за безопасность плавания судна, несмотря на присутствие на ходовом мостике капитана, до тех пор, пока он не будет специально информирован о том, что капитан принял на себя такую ответственность, и это будет взаимно понято;
в случае возникновения любых сомнений относительно выбора мер обеспечения безопасности, поставить в известность капитана.
Во время ходовой вахты, для обеспечения плавания по заданному пути, вахтенный помощник должен проверять, через достаточно частые промежутки времени, курс, местоположение, скорость судна, используя для этой цели любые имеющиеся навигационные средства.
Вахтенный помощник капитана должен знать расположение и работу всего судового навигационного оборудования и средств обеспечения безопасности, принимая во внимание их эксплуатационные возможности.
Вахтенный помощник не должен выполнять любые обязанности, мешающие обеспечению безопасности плавания судна.
Вахтенный помощник обязан максимально эффективно использовать все имеющееся в его распоряжении навигационное оборудование.
При использовании радиолокатора, вахтенный помощник должен иметь в виду необходимость постоянного соблюдения положений, относящихся к использованию радиолокатора, которые содержатся в действующих Международных правилах предупреждения столкновений судов в море 1972 года.
В случае необходимости, вахтенный помощник капитана должен без колебаний использовать руль, двигатель и звуковую сигнальную аппаратуру. Однако, о предполагаемых изменениях скорости оборотов главного двигателя необходимо давать своевременное предупреждение, если это возможно, или эффективно использовать органы дистанционного управления двигателем, в случае периодически безвахтенно обслуживаемого машинного отделения, в соответствии с применимыми процедурами.
Вахтенные помощники должны знать характеристики управляемости их судна, включая тормозные пути, и должны учитывать, что другие суда могут иметь отличающиеся характеристики управляемости.
Все действия, предпринятые во время вахты, имеющие отношение к плаванию судна, должны надлежащим образом документироваться.
. Особенно важно, чтобы в любое время вахтенный помощник обеспечивал осуществление надлежащего наблюдения. На судах, где штурманская рубка отделена от рулевой, вахтенный помощник может заходить в штурманскую рубку в случае необходимости, на короткий период для выполнения необходимых штурманских обязанностей, но перед этим ему следует удостовериться, что это безопасно и- что в период его отсутствия будет обеспечено надлежащее наблюдение.
. Проверка работы судового навигационного оборудования, когда судно находится в море, должна выполняться так часто, как это практически целесообразно и когда позволяют обстоятельства, в частности, если ожидаются опасности, которые могут повлиять на безопасность плавания судна. Когда необходимо, следует производить соответствующие записи. Такие проверки должны также проводиться до прибытия в порт и до отхода из порта.
Вахтенный помощник должен проводить регулярные проверки, чтобы обеспечить:
1. удержание судна на правильном курсе лицом, стоящим на руле или на авторулевом:
2. определение поправок главного магнитного компаса не менее одного раза за вахту и если это возможно, после каждого значительного изменения курса; частую сверку показаний гиро и главного магнитного компасов и согласованность репитеров с основным компасом;
3. проверку перехода с автоматического управления рулем на ручное, по крайней- мере один раз за вахту;
4. нормальное функционирование ходовых и сигнальных огней, также другого навигационного оборудования;
5. нормальную работу радиооборудования, в соответствии с пунктом 86 данного раздела;
6. нормальную работу органов управления периодически безвахтенно обслуживаемым машинным отделением, аварийно-предупредительной сигнализации и индикаторов.
Вахтенный помощник должен учитывать необходимость соответствия постоянно действующим требованиям Международной конвенции по охране человеческой жизни на море (СОЛАС) 1974 года. Вахтенный помощник должен учитывать:
- необходимость заблаговременного вызова рулевого и перехода на ручное управление рулем, чтобы безопасным образом выйти из любой потенциально опасной ситуации: и
- что при управлении судном посредством авторулевого, чрезвычайно опасно допускать развитие ситуации до момента, когда вахтенный помощник находится один и должен прервать наблюдение для выполнения экстренного действия.
Вахтенные помощники должны глубоко знать использование установленных на судне электрорадионавигационных средств, включая их возможности и ограничения, и использовать каждое из этих средств при необходимости: а также иметь в виду, что эхолот является важным навигационным средством.
Вахтенный помощник должен всегда использовать радиолокатор при ухудшении или в ожидании ухудшения видимости и при плавании в районах интенсивного судоходства, учитывал возможности и ограничения радиолокатора.
Вахтенный помощник должен обеспечивать, чтобы используемые шкалы дальности радиолокатора переключались достаточно часто для возможно более раннего обнаружения эхосигналов. Необходимо помнить, что эхосигналы от небольших объектов или объектов, имеющих плохую отражающую способность, могут быть не обнаружены.
При использовании радиолокатора, вахтенный помощник должен выбрать соответствующую шкалу дальности, внимательно следить за радиолокационным изображением и своевременно начать прокладку или систематический анализ движения цели.
Вахтенный помощник должен немедленно известить капитана:
- при ухудшении или ожидаемом ухудшении видимости;
- когда условия судно потока или перемещение отдельных судов вызывают опасения;
- когда возникают затруднения в сохранении заданного курса;
- если в рассчитанное время не обнаружены берег, навигационный знак или ожидаемые глубины;
- если неожиданно открылся берег, навигационный знак или произошло изменение глубин;
- случае поломки главных двигателей, органов дистанционного управления двигательной установкой, рулевого устройства или какого-либо важного навигационного оборудования, аварийно-предупредительной сигнализации или индикатора;
- при отказе радиооборудования;
- в штормовую погоду, если есть опасение возможного повреждения;
- когда на пути судна встречаются опасности для плавания, такие как лед или обломки судов;
- в любой другой аварийной ситуации или в случае возникновения каких-либо сомнений.
Несмотря на требование о немедленном извещении капитана в указанных выше случаях, вахтенный помощник должен, помимо этого, если потребуют обстоятельства, незамедлительно предпринимать действия для обеспечения безопасности судна.
Вахтенный помощник отдает персоналу вахты все необходимые инструкции и информацию, которые должны обеспечивать безопасное несение вахты, включая надлежащее наблюдение.
Руководство ИМО для торговых судов по поиску и спасению (IAМSAR).
Международная конвенция по поиску и спасанию на море, 1979 – International Convention On Maritime Search And Rescue (SAR), 1979. Одобрена 27 апреля 1979 года, вступила в силу 22 июня 1985 года, принята Украиной 4 апреля 1993 года. Главная цель – улучшить сотрудничество между государствами и организациями, участвующими в операциях по поиску и спасанию на море. О таком сотрудничестве говорит правило V/15 СОЛАС, призывающее правительства принять все меры по организации наблюдения берега и спасания людей, терпящих бедствие в море вблизи его берегов. На 7-ой сессии ИМО Резолюцией А.229(VII) было принято Руководство для торговых судов по поиску и спасанию (MERSAR). Технические требования изложены в Приложении к Конвенции, Государства-участники конвенции должны создать национальные спасательно-координационные центры (СКЦ) и при необходимости – подцентры, а также определить зоны ответственности. Поисково-спасательные зоны устанавливаются по соглашению с соседними государствами, которые не имеют отношения к границам между государствами.
Каждое государство должно направить в ИМО информацию о национальной организации поиска и о морской поисково-спасательной службе с указанием всех национальных СКЦ, возможностей связи с ними, наличии спасательных средств, которыми они располагают. Государства-участники должны содействовать установлению соглашений по SAR между соседними государствами для координации спасательно-поисковых операций, проведения совместных учений. В главе 5 определяются три аварийных стадии:
А)«стадия неопределенности» - отсутствие оговорённой информации с судна в должные сроки;
Б)«стадия тревоги» - отсутствие связи с судном и информации после «стадии неопределенности»;
В)«стадия бедствия» - получение информации об угрозе серьёзной опасности судну или лицу, необходимости определённой помощи или ситуация, когда после стадии тревоги все попытки установления связи с судном безуспешны и отсутствует информация о судне ото всех возможных источников.
Всем участникам конвенции рекомендуется устанавливать системы судовых сообщений, которые обеспечат полную информацию о движении судов и дадут возможность сократить время между моментом потери связи с судном и началом поисково-спасательных операций. Это также может помочь в определении судна, способного оказать немедленную помощь, включая медицинскую.
IAMSAR
Руководство издается совместно Международной Организацией (ICAO) Гражданской Авиации и Международной Морской Организацией (IMO).
IAMSAR (Том III) должен быть на борту спасательных единиц, авиации, и судов, чтобы помочь с выполнением поиска, спасения, или on-scene координирования, а также функционирует с аспектами поиска и спасения, которые имеют отношение собственным непредвиденным случаям на самолетах и судах. С тех пор, как это Руководство было издано в 1988, оно было обновлено, чтобы включать поправки, которые были приняты между 2001 и 2007 Организациями ICAO и IMO. Поправки 2007г. вступают в силу 1 Июня 2008 г.