

электртехника №8
.docxЭлектродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Как устроены электродвигатели постоянного тока
Работа электрического двигателя постоянного тока основана на явлении электромагнитной индукции. Из основ электротехники известно, что на проводник с током, помещенный в магнитное поле, действует сила, определяемая по правилу левой руки:
F = BIL,
где I — ток, протекающий по проводнику, В — индукция магнитного поля; L — длина проводника.
При пересечении проводником магнитных силовых линий машины в нем наводитсяэлектродвижущая сила, которая по отношению к току в проводнике направлена против него, поэтому она называется обратной или противодействующей (противо-э. д. с). Электрическая мощность в двигателе преобразуется в механическую и частично тратится на нагревание проводника.
Конструктивно
все электрические двигатели постоянного
тока состоят из индуктора и якоря,
разделенных воздушным зазором.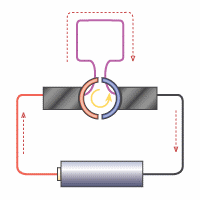
Индуктор электродвигателя постоянного токаслужит для создания неподвижного магнитного поля машины и состоит из станины, главных и добавочных полюсов. Станина служит для крепления основных и добавочных полюсов и является элементом магнитной цепи машины. На главных полюсах расположены обмотки возбуждения, предназначенные для создания магнитного поля машины, на добавочных полюсах - специальная обмотка, служащая для улучшения условий коммутации.
Якорь электродвигателя постоянного тока состоит из магнитной системы,собранной из отдельных листов, рабочей обмотки, уложенной в пазы, и коллектораслужащего для подвода к рабочей обмотке постоянноготока.
Коллектор представляет собой цилиндр, насаженный на вал двигателя и избранный из изолированных друг от друга медных пластин. На коллекторе имеются выступы-петушки, к которым припаяны концы секций обмотки якоря. Съем тока с коллектора осуществляется с помощью щеток, обеспечивающих скользящий контакт с коллектором. Щетки закреплены в щеткодержателях, которые удерживают их в определенном положении и обеспечивают необходимое нажатие щетки наповерхность коллектора. Щетки и щеткодержатели закреплены на траверсе, связанной с корпусом электродвигателя.
Коммутация в электродвигателях постоянного тока
В процессе работы электродвигателя постоянного тока щетки, скользя по поверхности вращающегося коллектора, последовательно переходят с одной коллекторной пластины на другую. При этом происходит переключение параллельных секций обмотки якоря и изменение тока в них. Изменение тока происходит в то время, когда виток обмотки замкнут щеткой накоротко. Этот процесс переключения и явления, связанные с ним, называются коммутацией.
В момент коммутации в короткозамкнутой секции обмотки под влиянием собственного магнитного поля наводится э. д. с. самоиндукции. Результирующая э. д. с. вызывает в короткозамкнутой секции дополнительный ток, который создает неравномерное распределение плотности тока на контактной поверхности щеток. Это обстоятельство считается основной причиной искрения коллектора под щеткой. Качество коммутации оценивается по степени искрения под сбегающим краем щетки и определяется по шкале степеней искрения.

Способы возбуждения электродвигателей постоянного тока
Под возбуждением электрических машин понимают создание в них магнитного поля, необходимого для работы электродвигателя. Схемы возбуждения электродвигателейпостоянного тока показаны на рисунке.
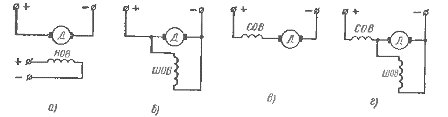
Схемы возбуждения электродвигателей постоянного тока: а - независимое, б - параллельное, в - последовательное, г - смешанное
По способу возбуждения электрические двигатели постоянного тока делят на четыре группы:
1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока.
2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря.
3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой.
4. Двигатели со смешаным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Пуск двигателей постоянного тока
В начальный момент пуска двигателя якорь неподвижен и противо-э. д. с.инапряжение в якоре равна нулю, поэтому Iп = U / Rя.
Сопротивление цепи якоря невелико, поэтому пусковой ток превышает в 10 - 20 раз и более номинальный. Это может вызвать значительные электродинамические усилия в обмотке якоря и чрезмерный ее перегрев, поэтому пуск двигателя производят с помощью пусковых реостатов - активных сопротивлений, включаемых в цепь якоря.
Двигатели мощностью до 1 кВт допускают прямой пуск.
Величина сопротивления пускового реостата выбирается по допустимому пусковому току двигателя. Реостат выполняют ступенчатым для улучшения плавности пуска электродвигателя.
В начале пуска вводится все сопротивление реостата. По мере увеличения скорости якоря возникает противо-э. д. с, которая ограничивает пусковые токи. Постепенно выводя ступень за ступенью сопротивление реостата из цепи якоря, увеличивают подводимое к якорю напряжение.
Регулирование частоты вращения электродвигателя постоянного тока
Частота вращения двигателя постоянного тока:
![]()
где U — напряжение питающей сети; Iя — ток якоря; Rя — сопротивление цепн якоря; kc — коэффициент, характеризующий магнитную систему; Ф — магнитный поток электродвигателя.
Из формулы видно, что частоту вращения электродвигателя постоянного тока можно регулировать тремя путями: изменением потока возбуждения электродвигателя, изменением подводимого к электродвигателю напряжения и изменением сопротивления в цепи якоря.
Наиболее широкое применение получили первые два способа регулирования, третий способ применяют редко: он неэкономичен, скорость двигателя при этом значительно зависит от колебаний нагрузки. Механические характеристики, которые при этом получаются, показаны на рисунке.
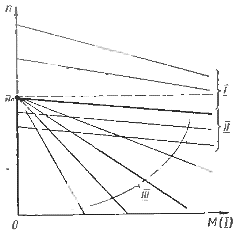
Механические характеристики электродвигателя постоянного тока при различных способах регулирования частоты вращения
Жирная прямая — это естественная зависимость скорости от момента на валу, или, что то же, от тока якоря. Прямая естественной механической характеристики несколько отклоняется от горизонтальном штриховой линии. Это отклонение называют нестабильностью, нежесткостью, иногда статизмом. Группа непаралельных прямых I соответствует регулированию скорости возбуждением, параллельные прямые II получаются в результате изменения напряжения якоря, наконец, веер III — это результат введения в цепь якоря активного сопротивления.
Величину тока возбуждения двигателя постоянного тока можно регулировать с помощью реостата или любого устройства, активное сопротивление которого можно изменять по величине, например транзистора. При увеличении сопротивления в цепи ток возбуждения уменьшается, частота вращения двигателя увеличивается. Приослаблении магнитного потока механические характеристики располагаются выше естественной (т. е. выше характеристики при отсутствии реостата). Повышение частоты вращения двигателя вызывает усиление искрения под щетками. Кроме того, при работе электродвигателя с ослабленным потоком уменьшается устойчивость его работы, особенно при переменных нагрузках на валу. Поэтому пределы регулирования скорости таким способом не превышают 1,25 - 1,3 от номинальной.
Регулирование изменением напряжения требует источника постоянного тока, например генератора или преобразователя. Такое регулирование используют во всех промышленных системах электропривода: генератор - двигатель постоянного тока (Г - ДПТ), электромашинный усилитель - двигатель постоянного тока (ЭМУ - ДПТ), магнитный усилитель - двигатель постоянного тока (МУ - ДПТ), тиристорный преобразователь - двигатель постоянного тока (Т - ДПТ).

Торможение электродвигателей постоянного тока
В электроприводах с электродвигателями постоянного тока применяют три способа торможения: динамическое, рекуперативное и торможение противовключением.
Динамическое торможение электродвигателя постоянного токаосуществляется путем замыкания обмотки якоря двигателя накоротко или черезрезистор. При этом электродвигатель постоянного тока начинает работать как генератор, преобразуя запасенную им механическую энергию в электрическую. Эта энергия выделяется в виде тепла в сопротивлении, на которое замкнута обмотка якоря. Динамическое торможение обеспечивает точный останов электродвигателя.
Рекуперативное
торможение электродвигателя
постоянного тока осуществляется в
том случае, когда включенный в
сеть электродвигатель вращается
исполнительным механизмом со скоростью,
превышающей скорость идеального
холостого хода. Тогда э. д. с, наведенная
в обмотке двигателя, превысит значение
напряжения сети, ток в обмотке двигателя
изменяет направление на
противоположное. Электродвигательпереходит
на работу в генераторном режиме, отдавая
энергию в сеть. Одновременно на его валу
возникает тормозной момент. Такой режим
может быть получен в приводах подъемных
механизмов при опускании груза, а также
при регулировании скорости двигателя
и во время тормозных процессов в
электроприводах постоянного тока.
Рекуперативное торможение двигателя постоянного тока является наиболее экономичным способом, так как в этом случае происходит возврат в сеть электроэнергии. В электроприводе металлорежущих станков этот способ применяют при регулировании скорости в системах Г - ДПТ и ЭМУ - ДПТ.
Торможение противовключением электродвигателя постоянного токаосуществляется путем изменения полярности напряжения и тока в обмотке якоря. При взаимодействии тока якоря с магнитным полем обмотки возбуждения создается тормозной момент, который уменьшается по мере уменьшения частоты вращенияэлектродвигателя. При уменьшении частоты вращения электродвигателя до нуля электродвигатель должен быть отключен от сети, иначе он начнет разворачиваться в обратную сторону.
№4
Для пуска двигателя могут быть применены три способа: прямой пуск; реостатный пуск; пуск путем изменения питающего напряжения.
Прямой пуск. При прямом пуске обмотка якоря подключается непосредственно к сети. Обычно в электродвигателях постоянного тока падение напряжения Iя?Rя во внутреннем сопротивлении цепи обмотки якоря при номинальном токе составляет 5—10% от Uном, поэтому при прямом пуске ток Iя = Uном / ?Rя = (10-20)Iном, что недопустимо для машины. По этой причине прямой пуск применяют только для двигателей очень малой мощности (до нескольких сотен ватт), в которых сопротивление ?Rя относительно велико, и лишь в отдельных случаях — для двигателей мощностью в несколько киловатт. При прямом пуске таких двигателей пусковой ток Iп= (4-6)Iном.
Реостатный пуск. Наибольшее применение получил реостатный пуск, при котором для ограничения тока в цепь якоря включают пусковой реостат Rп (рис. 130, а); он обычно имеет несколько ступеней (секций) R1, R2, R3, которые в процессе пуска замыкают накоротко специальными выключателями (контакторами) 1, 2 и 3. При этом сопротивление реостата постепенно уменьшается, что обеспечивает высокое значение пускового момента в течение всего времени разгона двигателя.
Рассмотрим процесс реостатного пуска на примере электродвигателя с последовательным возбуждением. В начальный момент пуска при п = 0 в цепь обмотки якоря вводится максимальное сопротивление Rп = R1 + R2+ R3, вследствие чего пусковой ток согласно закону Ома
Iп = U / (?Rя+Rп)
Сопротивление Rп подбирают так, чтобы для машин большой и средней мощности Iп= (1,5-1,8)Iном, а для машин малой мощности Iп= (2-2,5) Iном При включении в цепь обмотки якоря сопротивления Rп двигатель разгоняется по реостатной характеристике 1 (рис. 130, б), при этом в начальный момент пуска двигатель развивает максимальный пусковой момент Мп mах. Регулировочный реостат Rрв в этом случае выводят так, чтобы ток возбуждения Iв и поток Ф были максимальными. После того как якорь двигателя придет во вращение, в обмотке якоря индуцируется э. д. с. Е и ток
Iя = (U-E) / (?Rя+Rп)
По мере разгона двигателя и увеличения частоты вращения n растет э. д. с. Е, вследствие чего уменьшается ток в обмотке Iя и электромагнитный момент М. При достижении некоторого значения Mп min ступень R1сопротивления пускового реостата выключают, замыкая контактор 1, вследствие чего увеличивается ток Iя. Электромагнитный момент при этом возрастает до Мп max, а затем с увеличением частоты вращения п постепенно уменьшается по реостатной характеристике 2, соответствующей сопротивлению реостата R’п = R2 + R3. При уменьшении момента до Mп min выключают контактором 2 часть R2сопротивления пускового реостата, и двигатель переходит на работу по характеристике 3, соответствующей сопротивлению Rп” = R3. Таким способом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 1, 2 и 3 (см. жирные линии на рис. 130,б) до выхода на естественную характеристику 4, соответствующую сопротивлению Rп = 0. Пусковой момент двигателя при этом изменяется от Мп max до Mп min.
Следовательно, путем включения пускового реостата в цепь якоря можно осуществить пуск двигателя при некотором среднем пусковом моменте Мп ср = (Мп max+Mп min)/2 и резко уменьшить пусковой ток. Число ступеней пускового реостата зависит от жесткости естественной механической характеристики 4
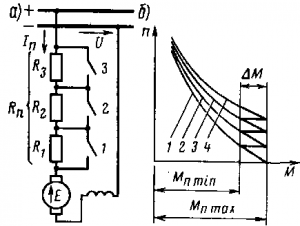 Рис.
130. Принципиальная схема реостатного
пуска электродвигателя (о) и кривые
изменения пускового момента (б)
Рис.
130. Принципиальная схема реостатного
пуска электродвигателя (о) и кривые
изменения пускового момента (б)
 Рис.
131. Кривые изменения тока и частоты
вращения при пуске электродвигателя
Рис.
131. Кривые изменения тока и частоты
вращения при пуске электродвигателя
 Рис.
132. Кривые изменения момента при реостатном
пуске электродвигателей с независимым
и параллельным возбуждением
Рис.
132. Кривые изменения момента при реостатном
пуске электродвигателей с независимым
и параллельным возбуждением
и требований, предъявляемых к плавности пуска (допустимой разности Мn max – Mn min). Пусковые реостаты рассчитывают на кратковременную работу под током. При пуске двигателя указанным способом частота вращения его якоря возрастает по ломаной кривой 1 (рис. 131), а ток обмотки якоря изменяется по ломаной кривой 2 между двумя крайними значениями пускового тока In max и In min.
В процессе реостатного пуска происходят некоторые колебания тока и пускового момента (силы тяги) (см. рис. 130,б). Однако при достаточно большом числе ступеней пускового реостата эти колебания не оказывают вредного влияния на работу подвижного состава.
Реостатный пуск электродвигателей с независимым и параллельным возбуждением осуществляется так же, как и в двигателях с последовательным возбуждением, путем постепенного выключения отдельных ступеней пускового реостата. При этом электродвигатель разгоняется по отдельным отрезкам реостатных характеристик 1—5 (см. жирные линии на рис. 132) до выхода на естественную характеристику 6.
При работе электродвигателя по естественной характеристике развиваемый им электромагнитный момент М и частота вращения п изменяются автоматически в соответствии с изменением нагрузочного момента на валу Мвн. В процессе же пуска при работе на реостатных характеристиках электромагнитный момент двигателя можно регулировать независимо от значения Мвн. Момент М должен быть больше Мвн, чтобы обеспечить разгон двигателя и подвижного состава с заданным ускорением. Развиваемый двигателем при пуске электромагнитный момент зависит от сопротивления пускового реостата и от скорости его изменения, т. е. скорости выключения отдельных его ступеней.
Реостатный пуск применяют на электровозах и электропоездах постоянного тока.
При приблизительно постоянной массе поезда, характерной для электропоездов, выключение ступеней пускового реостата производят автоматически. Для этой цели на электропоездах предусмотрено специальное реле ускорения (реле минимального тока), срабатывающее, когда пусковой ток уменьшается до установленного значения, и тем самым обеспечивающее замыкание соответствующих контакторов. На электровозах ступени пускового реостата выключаются по мере увеличения скорости движения поезда непосредственно самим машинистом при помощи ручного аппарата, называемого контроллером машиниста. Однако на некоторых электровозах применяют автоматическое выключение ступеней пусковых реостатов с той или иной скоростью.
Пуск путем изменения питающего напряжения. При реостатном пуске возникают довольно большие потери энергии в пусковом реостате. Этот недостаток можно устранить, если пускать двигатель путем плавного повышения напряжения, подаваемого на обмотку якоря. Такой пуск называют безреостатным. Для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Безреостатный пуск применяют на э. п. с. переменного тока и тепловозах.
№5
Все рабочие характеристики двигателя постоянного тока, как и генератора, зависят от способа включения цепи возбуждения по отношению к цепи якоря. Соединение этих цепей может быть параллельным, последовательным, смешанным и, наконец, они могут быть независимы друг от друга.
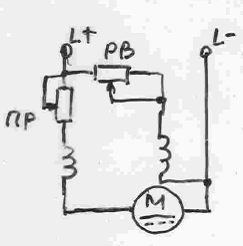
Двигатели с параллельным возбуждением.
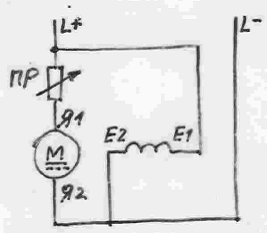
Здесь обмотка возбуждения и обмотка якоря соединены параллельно. Обмотка возбуждения имеет большее количество витков, чем обмотка якоря, поэтому ток обмотки возбуждения в большинстве случаев составляет несколько процентов от тока якоря. В цепь обмотки возбуждения может включаться регулировочный реостат. В цепь якоря включается пусковой реостат ПР.
Двигатель с независимым возбуждением.
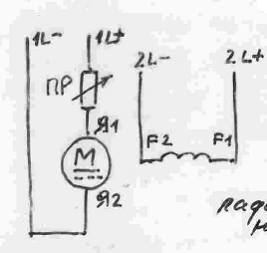
Если обмотку возбуждения подключить к другому источнику постоянного напряжения, то получим двигатель с независимым возбуждением. Такими же свойствами обладают электродвигатели с постоянным магнитом.
Скоростная характеристика двигателей с независимым и параллельным возбуждением – это зависимость n = f ( Iя ) при U = const и Iе = const, где
n - скорость
Iя - ток якоря
Iе - ток возбуждения.
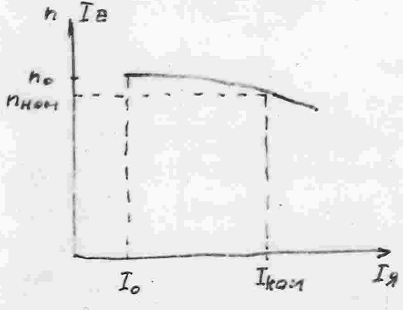
Рис.8.5.4. Скоростная характеристика.
Изменение скорости вращения может происходить за счёт изменения нагрузки и магнитного потока. Увеличение тока нагрузки незначительно изменяет внутреннее падение напряжения из-за малого сопротивления цепи якоря и поэтому лишь незначительно уменьшает скорость вращения двигателя. Что же касается магнитного потока, то вследствие реакции якоря при увеличении тока нагрузки он несколько уменьшается, что приводит к незначительному увеличению скорости двигателя. Таким образом, скорость вращения двигателя с параллельным возбуждением изменяется очень мало. Скорость вращения двигателя определяется формулой:
n = (U – IяRя) / c∙Φ, где
c – коэффициент, зависящий от устройства машины.
Скорость вращения двигателя с независимым возбуждением можно регулировать либо изменением сопротивления в цепи якоря, либо изменением магнитного потока. Следует отметить, что чрезмерное уменьшение тока возбуждения и, особенно, случайный обрыв этой цепи очень опасны для двигателей с параллельным и независимым возбуждением, т.к. ток в якоре может возрасти до недопустимо больших значений. При небольшой нагрузке (или на холостом ходу) скорость может настолько возрасти, что станет опасной для целостности двигателя.
Двигатель с последовательным возбуждением.
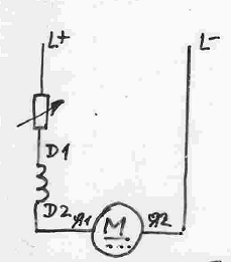
У такого двигателя ток якоря является одновременно и током возбуждения, т.к. обмотка возбуждения включена последовательно с якорем. По этой причине магнитный поток двигателя изменяется с изменением нагрузки. Скорость двигателя :
n =[ U – Iя (Rя + Rв)] / c∙Φ, где
Rя – сопротивление якоря
Rв – сопротивление обмотки возбуждения.
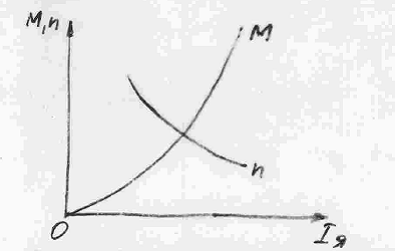
Скоростная характеристика двигателя посл. возбуждения.
На этом графике представлена скоростная характеристика двигателя последовательного возбуждения.
Из этой характеристики видно, что скорость двигателя сильно зависит от нагрузки. При увеличении нагрузки увеличивается падение на сопротивлении обмоток при одновременном увеличении магнитного потока, что приводит к значительному уменьшению скорости вращения. Поэтому такие двигатели не следует пускать вхолостую или с малой нагрузкой. Двигатели с последовательным возбуждением применяют в тех случаях, когда необходим большой пусковой момент или способность выдерживать кратковременные перегрузки. Они используются в качестве тяговых двигателей в трамваях, троллейбусах, метро и электровозах, а также на подъёмных кранах и для пуска двигателей внутреннего сгорания (стартеры).
Двигатель со смешанным возбуждением.
На каждом полюсе такого двигателя имеются две обмотки – параллельная и последовательная. Их можно включить так, чтобы магнитные потоки складывались (согласное включение) или вычитались (встречное включение). Формулы для скорости вращения и вращающего момента для такого двигателя:
n = (U – Iя ∙ Rя ) / c∙( Φпарал. +/- Φпосл.)
М = c ∙ Iя ∙ (Φпарал. +/- Φпосл.)
В зависимости от соотношения магнитных потоков двигатель со смешанным возбуждением по своим свойствам приближается либо к двигателю с последовательным возбуждением, либо к двигателю с параллельным возбуждением. Как правило, у таких двигателей последовательная обмотка является главной (рабочей), а параллельная – вспомогательной. Благодаря наличию магнитного потока параллельной обмотки, скорость такого двигателя не может сильно возрастать на малых нагрузках. Двигатели с согласным включением применяются, когда необходим большой пусковой момент и регулировка скорости при переменных нагрузках. Двигатели со встречным включением обмоток применяются в тех случаях, когда необходима постоянная скорость при изменяющейся нагрузке.
Для изменения направления вращения двигателя постоянного тока надо изменить направление тока либо в обмотке возбуждения, либо в обмотке якоря. Изменением полярности на клеммах машины можно поменять направление вращения только в двигателе с постоянным магнитом или независимым возбуждением. В других двигателях надо изменить направление тока либо в якорной обмотке, либо в обмотке возбуждения. Двигатель постоянного тока нельзя включать подсоединением полного напряжения. Пусковой ток машин постоянного тока где-то в 20 раз превышает номинальный ток (он тем больше, чем больше и быстрее мотор). В больших машинах пусковой ток может превышать номинальный ток в 50 раз.
Большой ток вызывает в коллекторе круговое искрение и разрушает коллектор. Для включения применяют плавное увеличение напряжения или пусковые реостаты. Прямое включение допускается при низких напряжениях в случае маленьких двигателей, у которых сопротивление обмотки якоря большое.
№»3
Двигатель постоянного тока (ДПТ) представляет собой преобразователь электрической
энергии постоянного тока в механическую. Конструкция двигателя показана на рис.1. Она имеет
три основные части: статор (индуктор), якорь и коллектор.
Рис. 1. Конструкция двигателя постоянного тока
1 – индуктор, 2 – якорь, 3 – коллектор
Индуктор (1) - неподвижная часть машины, представляет собой полый литой стальной
цилиндр из электротехнической стали, к которому с внутренней стороны болтами крепятся
сердечники (полюса). На сердечниках располагается обмотка возбуждения (ОВ), подключаемая к
щеткам. Индуктор предназначен для создания основного магнитного поля.
Якорь (2) (вращающаяся внутренняя часть машины) представляет собой цилиндр, собранный
из стальных листов. В пазах якоря уложена якорная обмотка.
На одном валу с якорем закреплен коллектор (3), который представляет собой полый
цилиндр, составленный из отдельных медных пластин (ламелей), изолированных друг от друга и
от вала якоря и электрически связанных с отдельными частями обмотки якоря. Назначение
коллектора - механическое выпрямление переменных синусоидальных ЭДС в постоянное по
величине и направлению напряжение, снимаемое во внешнюю цепь с помощью щеток,
примыкающих к коллектору.
1Свойства двигателей постоянного тока, в основном, определяются способом питания
обмотки возбуждения. В связи с этим двигатели постоянного тока классифицируют на 2 типа: с
независимым возбуждением (рис.2а) и самовозбуждением (рис.2 б, в, г)
2
а) б) в) г)
Рис.2
ОВ - обмотка возбуждения, Я – якорь.
Обмотка возбуждения в ДПТ с независимым возбуждением питается от отдельного
источника постоянного тока (от полупроводникового выпрямителя, аккумулятора или возбудителя
- генератора постоянного тока).
В самовозбуждающихся ДПТ цепи якоря и индуктора электрически связаны, т.е. обмотка
возбуждения питается от ЭДС якоря машины. В зависимости от электрической схемы соединения
обмоток якоря и индуктора машины с самовозбуждением делятся еще на три типа: параллельного,
последовательного и смешанного возбуждения (рис.2 б, в, г).
ДПТ как все электрические машины обратимы, т.е. они без существенных конструктивных
изменений могут работать как в режиме генератора, так и в режиме двигателя.
Режим работы ДПТ с параллельным возбуждением.
Рассмотрим работу ДПТ с параллельным возбуждением (рис.2б). При включении двигателя в
сеть постоянного тока в обеих обмотках возникают токи. При этом в обмотке возбуждения ток
возбуждения IВ создает магнитное поле индуктора. Взаимодействие тока якоря с магнитным полем
индуктора создает электромагнитный момент МЭ.
МЭ = сФIЯ,
(1)
где с – постоянный коэффициент;
IЯ – ток якоря;
Ф – магнитный поток.
Электромагнитный момент МЭ отличается от момента МВ на валу двигателя на величину
момента потерь холостого хода МХХ, которым ввиду малости можно пренебречь и считать, что
Мэ=Мв=М.
В проводниках вращающего якоря индуктируется протво-ЭДС E:
Е = knФ, (2)
где n – скорость вращения якоря;
k - постоянный коэффициент.
Уравнение электрического равновесия двигателя имеет вид: U = E + IЯ·RЯ=knФ+ IЯ·RЯ, (3)