

Моделирования переходного процесса по каналу задания
Для моделирования переходного процесса по каналу задания запишем уравнение в виде:

|
|
|
где значение коэффициентов а такое же как и для предыдущего уравнения, а значение коэффициентов b:

Для моделирования переходных процессов воспользуемся программой RKM1. реализующей метод Рунге-Кутта решения дифференциальных уравнений. Прежде чем работать с указанной программой, преобразуем уравнение
 к
виду
к
виду
|
|
|

а затем
|
|
|

где
 и
и

Так же для моделирования переходного процесса по каналу возмущающего воздействия:


а начальные условия:

и по каналу задания:

а начальные условия:

При этом выберем погрешность вычислений Е = 0.2, начальный шаг интегрирования Н = 0.2.
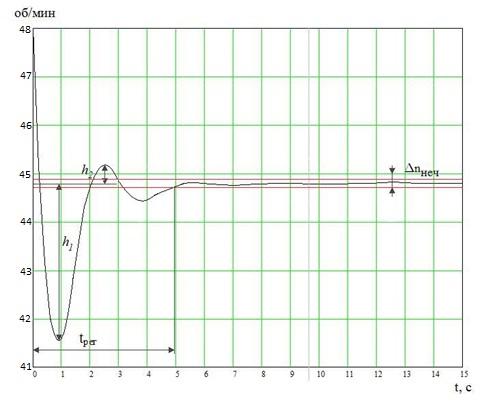
График переходного
процесса в САРЧ при увеличении нагрузки
на величину
 .
.
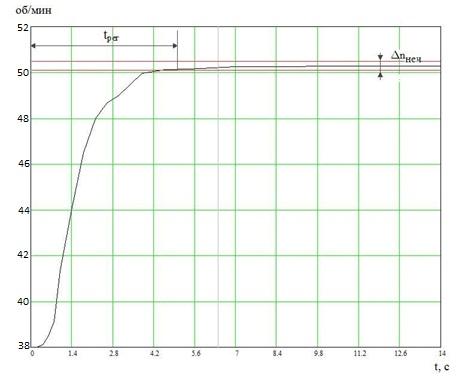
График переходного процесса в САРЧ при увеличении задания на регулятор на 10 об/мин.
Для оценки поведения системы в переходных процессах и в установившемся режиме определим основные показатели качества САРЧ: переходные процессы – затухающие, колебательные. Оба переходных процесса отражают особенности статического регулирования.
Нечувствительность контура регулирования определяется как

где
 - диапазон
изменения частоты вращения вала, в
пределах которого регулятор не реагирует
на это изменение.
- диапазон
изменения частоты вращения вала, в
пределах которого регулятор не реагирует
на это изменение.
- для переходного
процесса по
возмущению:

- для переходного
процесса по
заданию:

При этом приближенно можно определить время переходного процесса
- для переходного
процесса по
возмущению:
 ;
;
- для переходного
процесса по
заданию:
 .
.
Динамический заброс частоты вращения определяется как:

- для переходного
процесса по
возмущению:
 ;
;
- для переходного
процесса по
заданию:
 .
.
Перерегулирование определяется как:

- для переходного
процесса по
возмущению:
 ;
;
- для переходного
процесса по
заданию:
 .
.
Статическая ошибка определяется как:


Краткие выводы
В процессе выполнения курсового проекта мною была исследована совместная работа двигателя MAN B&W 7S70MC с регулятором частоты вращения
PGA-58(ЖОС) фирмы Woodward.
В процессе выполнения работы были произведены исследования двигателя, как объекта регулирования частоты вращения вала, построены Внешние и частичные статические характеристики ВФШ и главного двигателя. Графо-аналитическим путем были определены постоянная времени и коэффициенты объекта регулирования на заданном режиме.
Результатом выполнения курсового проекта послужили переходные процессы, смоделированные по каналам возмущающего и задающего воздействий, по которым были определены основные критерии качества системы автоматического регулирования.
Список использованной литературы
Виноградов А.А. Автоматизированные системы управления судовыми дизельными и газотурбинными установками (курсовое и дипломное проектирование): Учебное пособие. – ОНМА, 2004. – 88с.
Ланчуковский В.И., Козьминых А.В. Автоматизированные системы управления судовыми дизельными и газотурбинными установками: Учебник для вузов. – 2-е изд.,– М.: Транспорт, 1990. – 335 с.