По номинальной винтовой характеристики
3.5 Расчёт коэффициентов уравнения динамики двигателя на заданном режиме работы
Определение числовых значений
коэффициентов
 ,
, и
и уравнения
динамики ГД по формулам представленным
выше. Т.к. функции
уравнения
динамики ГД по формулам представленным
выше. Т.к. функции и
и представлены
графически, то возможно графоаналитическое
определение рассматриваемых частных
производных.
представлены
графически, то возможно графоаналитическое
определение рассматриваемых частных
производных.
Определим частные производные
 и
и по графикам
совмещённых скоростных характеристик
мощности ГД и ВФШ:
по графикам
совмещённых скоростных характеристик
мощности ГД и ВФШ:










![]()
![]()
![]()
![]()



![]()


![]()

![]()
![]()
![]()
![]()
![]()
К определению частных производных
 и
и
Вычислив эти производные, определяют
значения фактора устойчивости
 и постоянной
времени
и постоянной
времени двигателя:
двигателя:
 ,
,
 ,
,

 Расчёт
коэффициентов усиления
Расчёт
коэффициентов усиления
 и
и двигателя
требует определения значений частных
производных
двигателя
требует определения значений частных
производных и
и . Для этого
необходимы функции вида
. Для этого
необходимы функции вида и
и :
:
Частные производные
 и
и вычислим ранее
используемым графоаналитическим
методом:
вычислим ранее
используемым графоаналитическим
методом:
 ;
;
 .
.
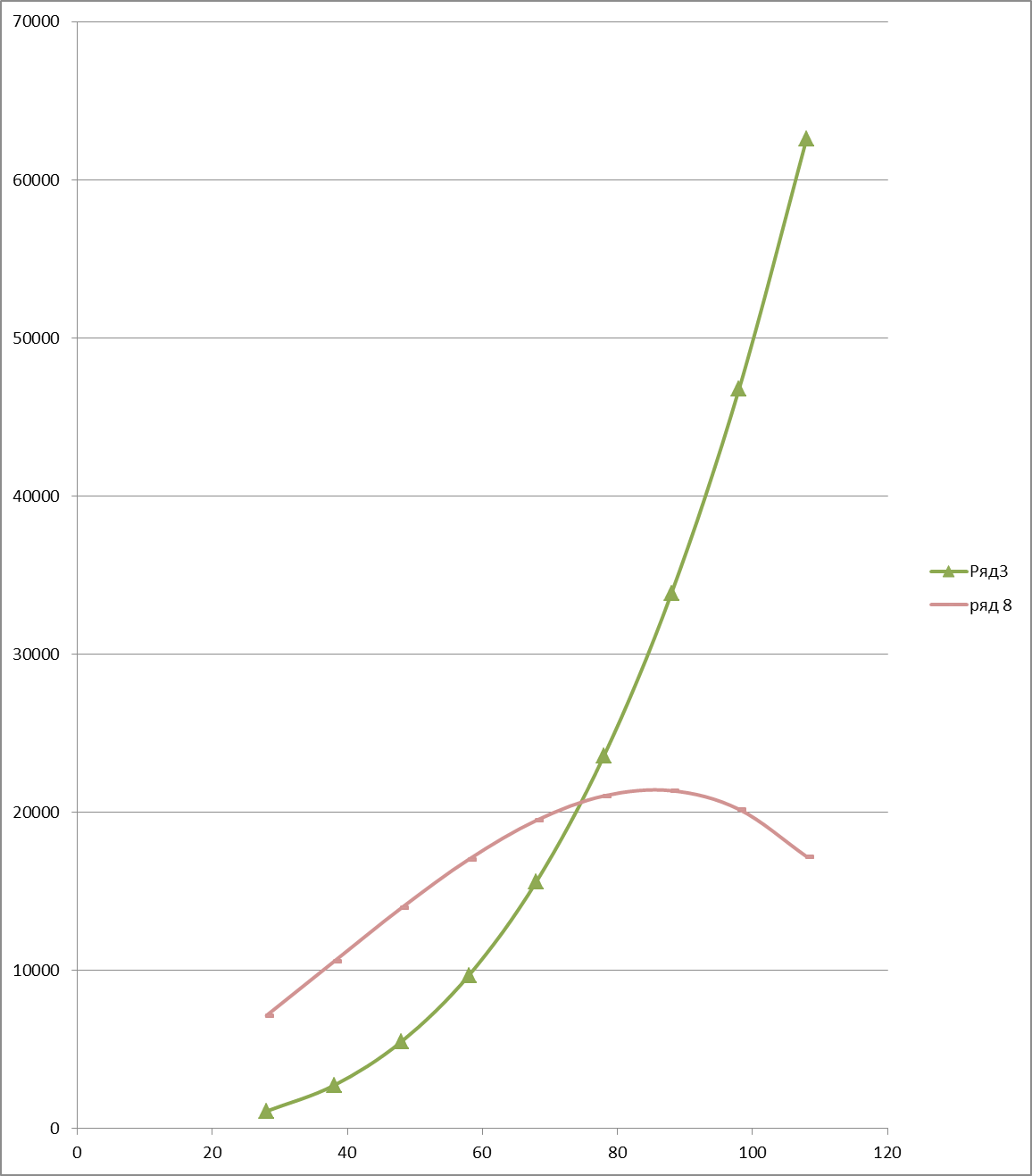
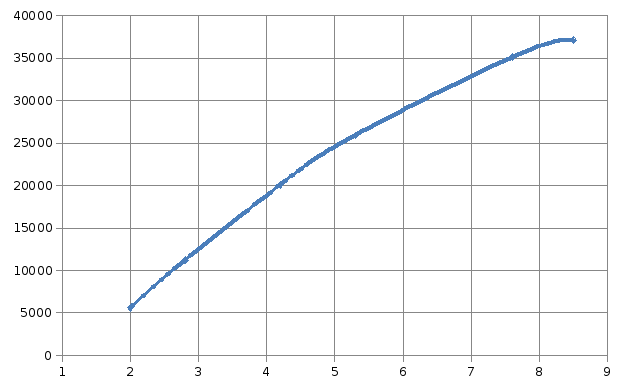
Для этого построим
график зависимость
мощности
 от внешнего
возмущающего воздействияс,
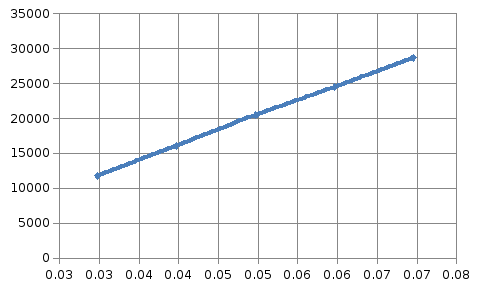
и график зависимость мощности
от внешнего
возмущающего воздействияс,
и график зависимость мощности
 двигателя от
регулирующего воздействияh
по подаче
топлива :
двигателя от
регулирующего воздействияh
по подаче
топлива :
|
|
|
|
11800 |
0.0298 |
|
16100 |
0.0397 |
|
20500 |
0,0497 |
|
24500 |
0.0596 |
|
28700 |
0.0695 |



|
|
|
|
5600 |
2 |
|
11200 |
2,8 |
|
20100 |
4,2 |
|
25900 |
5,3 |
|
35100 |
7,6 |
|
37100 |
8,5 |


![]()
![]()
Зависимость мощности от внешнего возмущающего воздействия с при фиксированых частотах вращения вала n
![]()
![]()
Зависимость мощности двигателя от регулирующего воздействия h по подаче топлива при фиксированой частоте


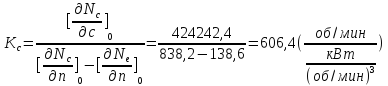
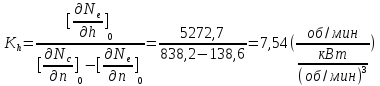
Определим
коэффициенты
 и
и по формулам:
по формулам:
4. Исследование динамики системы автоматического регулирования частоты вращения
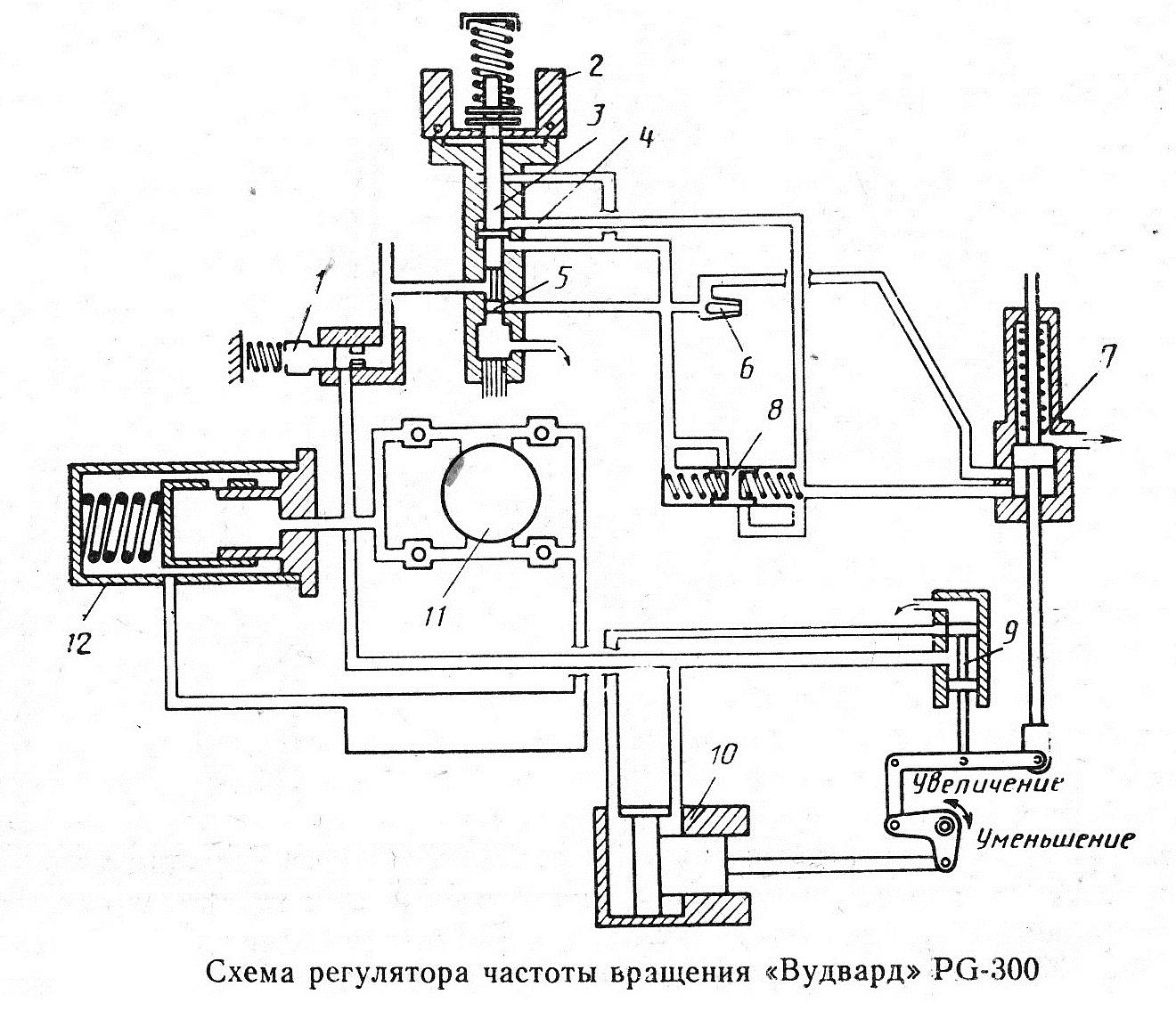
4.1. Краткая техническая характеристика, устройство и принцип действия регулятора
Регулятор PG-300. При необходимости получения больших перестановочных усилий на выходном валу регулятора фирма «Вудвард» разработала регулятор PG-300 (рис. 103), который в отличие от регулятора PG-12 снабжен дополнительным дифференциальным сервомотором, аккумулятором большей емкости и масляным насосом давлением 1,86 МПа.
Масляный насос 11 нагнетает масло в аккумулятор 12, клапан 1 постоянного давления и золотник 9 управления. Клапан постоянного давления дросселирует масло в напорной магистрали от 1,86 МПа до 0,62 МПа. В случае повышения давления в напорной магистрали поршень клапана 1 смещается влево и уменьшает площадь проходного сечения напорной магистрали. При уменьшении давления поршень клапана 1 под действием пружины перемещается вправо и увеличивает площадь проходного сечения напорной магистрали. Масло с постоянным давлением 0,62 МПа после клапана 1 поступает к управляющему пояску 5 золотника 3 чувствительного элемента. При уменьшении нагрузки на дизель частота вращения вала увеличивается, грузы 2 чувствительного элемента расходятся, преодолевая натяжение задающей пружины, золотник 3 поднимается вверх и управляющий поясок 5 открывает на слив канал управления нижней полостью сервомотора 7 первой ступени. Поршень 8 компенсатора гибкой обратной связи передвигается влево, а поршень сервомотора 7 перемещается вниз под действием пружины. Управляющий золотник 9 перемещается вниз под действием сервомотора 7. Левая управляемая полость сервомотора 10 второй ступени сообщается со сливной полостью, и под действием постоянного давления напорной магистрали поршень сервомотора 10 перемещается влево, поворачивая выходной зал регулятора на уменьшение подачи топлива.
При повороте выходного вала через систему рычагов золотник 9 возвращается в исходное положение, отсекая слив масла из левой полости сервомотора 10. Золотник 3 чувствительного элемента возвращается в исходное положение за счет разности давлений на пояске 4 гибкой обратной связи. В данном случае полость под пояском 4 сообщена со сливом, а верхняя полость находится под давлением масла, вытесняемого поршнем сервомотора 7. Этот перепад давлений выравнивается через калиброванное отверстие иглы 6 изодрома. При большом увеличении частоты вращения вала поршень сервомотора 7 перемещается в положение минимальной подачи топлива, закрывает масляный канал обратной связи между сервомотором и иглой 6 изодрома и не допускает нормального выравнивания давлений на пояске 4. Это заставляет компенсационный поршень 8 перемещаться влево от центрального положения, что приводит к увеличению давления на верхнюю часть пояска 4, т. е. повышается перепад давлений на пояске 4. вследствие чего временно увеличивается задание частоты вращения. Регулятор начнет нормально работать, как только частота вращения вала дизеля станет ниже этого временного задания. Этот процесс называется отключением обратной связи. Когда поршень сервомотора 7 поднимется и откроет канал обратной связи, работа дизеля будет соответствовать заданной частоте вращения.
При увеличении нагрузки частота вращения вала дизеля уменьшается, грузы 2 чувствительного элемента сходятся и опускают вниз золотник 3. Масло из магистрали постоянного давления после клапана 1 поступает через окно, открытое пояском 5, в левую полость поршня
и вытесняется в нижнюю полость сервомотора 7. Поршень сервомотора 7 движется вверх и перемещает вверх управляющий золотник 9. Масло из напорной магистрали через золотник 9 поступает в левую полость сервомотора 10. Так как сервомотор 10 дифференциального типа, то его левая часть больше правой, поэтому при одинаковом давлении поршень сервомотора 10 перемещается вправо, т. е. на увеличение подачи топлива. При этом система рычагов возвращает золотник
в
исходное положение. На пояске 4
создается перепад давлений, причем
снизу больше, чем сверху, что заставляет
золотник 3
вернуться в исходное положение. Время
действия ГОС регулируется путем
перемещения иглы изодрома.