

4.2 Разработка функциональной схемы системы регулирования и формирование ее математической модели.
Для формирования математической модели АСР составим функциональную схему АСР регулирования частоты вращения вала главного двигателя с заданным регулятором.
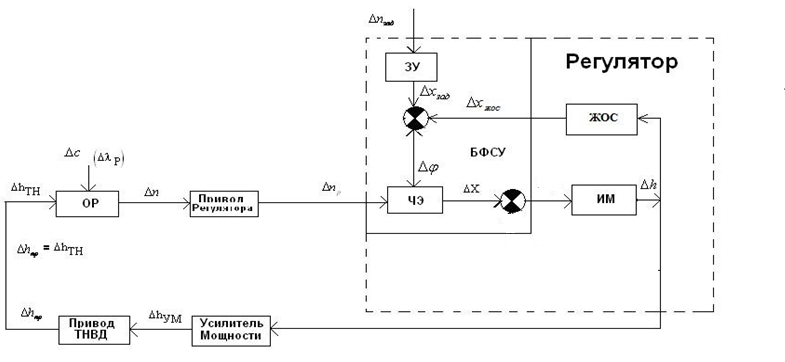
Рис6.Функциональная схема контура автоматического регулирования частоты вращения вала главного двигателя
Для составления математической модели запишем следующие уравнения функциональных элементов регулятора и уравнение ГД
|
|
|
|
|
|
|
(15) |
|
|
|
(16) |
|
|
|
(17) |
|
|
|
|
|
|
|
(18) |
|
|
|
(19) (20)
|





4.2.1.Уравнение динамики регулятора
Для вывода уравнения динамики регулятора воспользуемся полученными выше уравнениями для всех элементов, входящих в регулятор (чувствительный элемент, задающее устройство, сумматор, исполнительный механизм, гибкая обратная связь, жесткая обратная связь).
Из уравнения (6) получим:








После выполнения математических преобразований – получим уравнение динамики регулятора:




4.2.2 Статика регулятора и выбор его параметров
При условии, что
 , уравнение
динамики регулятора порождает уравнение
статического равновесия регулятора,
которое имеет вид:
, уравнение
динамики регулятора порождает уравнение
статического равновесия регулятора,
которое имеет вид:




Проверим размерности коэффициентов усиления регулятора Kр и KЗАД:


4.2.3 Общее уравнение динамики системы регулирования

Из уравнения (15) :



Представим уравнение динамики замкнутой САР в целом с помощью передаточных функций в виде:



Зададимся коэффициентами функциональных элементов регулятора
|
объект регулирования значения рассчитанные в первой части
|
|
|
чувствительный элемент
|
|
|
Исполнительный механизм |
|
|
ГОС |
|
|
ЖОС |
|
|
задающее устройство |
|
|
|
|
|
привод |
|
|
передаточное число редуктора |
|
 ,
с
,
с
 ,
,

 ,
,

 ,
,

 ,
,








Приведение математических моделей к стандартным формам представления:












































5 Моделирование и оценка качества переходных процессов
Для расчета переходных процессов воспользуемся полученным ранее уравнением динамики системы автоматического регулирования в целом:
|
|
|

Данное выражение, если считать что порядок полиномов А(р), R(p) и К(р) равен соответственно i > m , можно представить в форме:
|
|
(22) |

Для расчета
переходных процессов будем использовать
ступенчатые функции вида:
 или
или . Для этого
будем рассматривать ступенчатые функции
. Для этого
будем рассматривать ступенчатые функции и
и с масштабирующими
факторами:
с масштабирующими
факторами:
 и
и

С учетом изложенного рассмотрим частные случаи уравнения (22) в усеченном виде:
|
и
|
|


Представив уравнения в обобщенном виде получим:
|
|
|

При нулевых исходных начальных условиях новые начальные условия определяются согласно условия:
|
|
|

Моделирования переходного процесса по каналу возмущающего воздействия
Для моделирования переходного процесса по каналу возмущающего воздействия запишем уравнение :
|
|
|

где

