

7 Модернизация электропривода рулевой машины
7.1 Обзор рулевой машины
Требования ИМО (Регистра) к рулевым машинам.
Ко вся кому рулевому устройству предъявляются следующие требования: надежность и безопасность работы при любых навигационных условиях; живучесть; обеспечение заданного угла и заданной скорости перекладки руля при максимальной скорости судна; возможность быстрого перехода от основного вида управления к вспомогательному; возможность управления с нескольких мест; удобство управления, наименьшие габаритные размеры и масса; простота устройства, ухода и обслуживания; экономичность. Основные требования СОЛАС и Регистра к конструктивному исполнению рулевых машин следующие.
1. Суда должны быть снабжены главным и вспомогательным рулевыми приводами, причем: главный рулевой привод должен обеспечивать перекладку полностью погруженного руля (или поворотной насадки) с 35° одного борта на 30° другого при максимальной скорости переднего хода, относящегося к этой осадке, за время не более 28 с; вспомогательный рулевой привод должен обеспечивать перекладку руля (или насадки) при тех же условиях с 15° одного борта на 15° другого не более чем за 60 с при скорости переднего хода, равной половине максимальной, но не менее 7 уз.
2. Главный рулевой привод может состоять из двух и более идентичных насосов. В этом случае вспомогательный рулевой привод не требуется. Время перекладки (28с) должно обеспечиваться на грузовых судах при совместном действии насосов.
3. Переход с главного рулевого привода на вспомогательный при аварии должен выполняться за время не более 2 мин.
4. Управление главным рулевым приводом должно обеспечиваться с ходового мостика и из румпельного отделения. Предусматриваются две отдельные линии управления, получающие питание непосредственно от ГРЩ, но одна из них может запитываться через АРЩ.
5. В рулевой рубке и ЦПУ должна быть световая и звуковая сигнализация: об исчезновении напряжения, обрыве фазы и перегрузке в цепи питания, исчезновении напряжения в системе управления и минимальном уровне масла в расходном баке.
6. Около каждого поста управления, а также в румпельном помещении должны быть указатели положения руля. Ошибка в показаниях не должна быть более: 1° в ДП; 1,5° в интервале от 0 до ±5°; 2,5° в интервале от ±5 до ±35°.
7. Каждое
нефтеналивное судно, химо- или газовоз
валовой вместимостью 10 тыс. рег. т и
более должен удовлетворять следующим
требованиям: главный рулевой привод
должен быть таким, чтобы в случае потери
управляемости судна из-за единичного
повреждения в любой части одной из
силовых систем она восстанавливалась
в течение не более 45 с; рулевой привод
должен состоять из двух независимых и
отдельных силовых систем, каждая из
которых обеспечивает время, перекладки
руля не более 28 с; по крайней мере, он
должен состоять из двух одинаковых
силовых систем, которые, действуя
одновременно, обеспечивают время
перекладки не более 28 с; должна быть
предусмотрена возможность обнаружения
утечки рабочей жидкости из любой системы
и автоматическая изоляция поврежденной
системы с тем, чтобы другая оставалась
в рабочем состоянии.

8. Главный и вспомогательный рулевые приводы должны иметь защиту от перегрузки деталей и узлов при возникновении на баллере момента, превышающего в 1,5 раза расчетный крутящий момент. Предохранительные клапаны должны быть отрегулированы на давление не более 1,5 и не менее 1,25 номиналвного.
9. Насосы ГРМ должны иметь защитные устройства против вращения отключенного насоса в обратном направлении или автоматически срабатывающее устройство, запирающее поток жидкости через отключенный насос.
10. Нельзя допускать соединения системы трубопроводов ГРМ с другими гидравлическими системами. Каждый пополнительный бак должен быть оборудован сигнализацией о минимальном уровне жидкости. Кроме того, должны быть предусмотрены стационарные (резервные) цистерны, заполненные рабочей жидкостью и соединенные с рулевым приводом.
11. В гидравлических системах должны быть предусмотрены фильтры необходимой пропускной способности и чистоты фильтрации рабочей жидкости.
12. Пуск и остановка электродвигателей насосов должны осуществляться из рулевой рубки и румпельного помещения. Должен обеспечиваться повторный автоматический пуск электродвигателей при восстановлении напряжения после перерыва. Электропривод должен получать также питание от АРЩ. Электродвигатели должны допускать перегрузку не менее 1,5 расчетного момента в течение 1 мин.
7.2 Последовательность расчёта рулевой машины
Длина габаритная 54,80 м
Длина между перпендикулярами 49,40 м
Ширина расчетная 9,80 м
Осадка средняя в грузу 4,46 м
Водоизмещение
наибольшее 1136 т
Скорость 12,5 уз
Тип руля Полубалансирный
7.2.1 Определение геометрических характеристик руля, гидродинамических сил и моментов, действующих на них
Высоту руля hр определяем из условия расположения руля в кормовом подзоре
 =
= м;
м;
где Тср – осадка судна в грузу.
Установить площадь рулей Sp в зависимости от типа и размерений судна
 =0,033∙54,8∙4,46=8,06
м2;
=0,033∙54,8∙4,46=8,06
м2;
где =0,033–0,044 – для судов типа БМРТ, ПСТ, СРТ;
Lвл – длина судна по грузовой ватерлинии.
Площадь
руля  =
= м2;
м2;
где =1- количество рулей.
Относительное
удлинение  =
= ,
(для морских судов
,
(для морских судов
= 0,5-2,5).
Средняя
ширина руля  =
= м;
м;
Степень
компенсации полубалансирных рулей
определяют по формуле
 ;
;
где SХ – площадь балансирной части руля, м2.
k = 0,15–0,35. Принимаем k=0,27
Тогда Sx=k∙Sp=0,27∙8,66=2,77 м2.
7.2.2 Гидродинамический расчет руля
После
установления геометрических характеристик
руля следует выполнить гидродинамический
расчет руля с целью определения расчетных
значений гидродинамических силы и
момента на баллере руля, необходимых
для выбора рулевой машины, на переднем
ходу судна :
Проводится расчет профильных рулей
Исходными данными для расчета являются:
=1,5- относительное удлинение руля;
Sp=10,3 м2 – площадь пера руля;
Vp – скорость обтекания руля при его работе в потоке винта.
 =0,515∙12∙(1-0,13)=5,3
м/с;
=0,515∙12∙(1-0,13)=5,3
м/с;
где VS=15 уз. – максимальная расчетная скорость движения судна на переднем ходу;
- коэффициент попутного потока,
 ;
;
здесь - коэффициент общей полноты водоизмещения судна,
 ;
;
- объемное водоизмещение судна, м3,
 =
= м3;
м3;
здесь Dmax=8743 т – весовое водоизмещение судна (максимальное);
= 1,025 – массовая плотность морской воды, т/м3;
hP – высота руля;
z =1 – показатель степени (для среднего руля z=1, для бортовых рулей z=2).
Сила нормального давления
 кН;
кН;
где Cn – безразмерный коэффициент нормальной силы.
 =
= ;
;
где =1,5 - относительное удлинение руля;
=0,61 рад - угол перекладки.
Гидродинамический момент относительно передней кромки руля
 =
= кНм;
кНм;
где Cm – безразмерный коэффициент момента относительно передней кромки руля.
 =
= ;
;
Момент гидродинамической нагрузки на баллере балансирного руля
Мδ=Мnk–NX=171,16-210,055∙0,64=35,35 кНм
где Х – ширина компенсационной части руля, м.
 =
= м;
м;
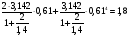
Результаты расчета занесены в табл.1.
7.2.3Определение диаметра баллера руля.
Гидродинамический расчет, в результате которого определяется значения крутящего момента на баллере руля, является предварительным и не учитывает некоторых возможных в эксплуатации дополнительных внешних нагрузок.
Определяем значения крутящего момента на баллере руля
 =1,15∙35,35=40,66
кНм;
=1,15∙35,35=40,66
кНм;
Рассчитайте диаметр баллера, работающего на кручение:
 =
= м;
м;
где
Мкр
– расчетный крутящий момент, кНм;
Rен– предел текучести материала баллера, МПа (для сталей, применяемых для изготовления баллера руля Rен 390 МПа).
Полученное значение d округляем до ближайшего значения из стандартного ряда диаметров баллера руля d=0,125 м.
7.2.5Расчет электрогидравлического рулевого привода
Исходные данные :
- Число рулей 1
-
Диаграмма вращающихся моментов на
баллере на переднем ходу


–Наибольший вращающий момент, на баллере на переднем ходу при max = 350
 =35,37
кНм
=35,37
кНм
–Время перекладки руля с борта на борт (2max-5О) на переднем ходу судна при работе одного насоса Т=28 с.
–Род тока и напряжение судовой сети – 380В 50Гц
7.2.6Выбор
стандартной рулевой гидравлической
машины
По наибольшему вращающему моменту на баллере руля на переднем ходу при max=35О выбираем рулевую электрогидравлическую машину:
Тип рулевой машины – Р01
 Нм
Нм
Число цилиндров – 2
Число насосов –1
Тип гидравлического насоса ПД №20
Давление в цилиндрах PN.KAT =686∙104Н/м2
–Моменты
Мmax=MH∙Km=117,731∙2=235,466 Hм;
Мпус=МН∙Кп=117,731∙1,2=141,27 Hм
- Токи :
Iп=IН∙К1п=55,4∙5=154,2 А,


7.2.7Определение основных параметров электрогидравлической рулевой машины
– Радиус румпеля в среднем положении
 м;
м;
– Максимальный ход плунжеров
 =0,162
∙tg35=0,114
м;
=0,162
∙tg35=0,114
м;
– Диаметр цилиндров
 ,
,
D м;
м;
где m=1 – число пар цилиндров;
f = 0,1 – коэффициент трения.
7.2.8Определение
параметров гидравлического насоса и
его выбор
–Объем перекачиваемой насосом рабочей жидкости при перекладке руля с борта на борт
 =
=
 м3;
м3;
–Наибольшая теоретическая производительность насоса
 =
= м3/с;
м3/с;
где Vср = 0,7 – 0,85 – средний объемный КПД насоса.
–Номинальная производительность насоса
 =
= м3/с;
м3/с;
где k0 = 1,11 - 1,25 – коэффициент неравномерности передачи;
kрез = 1 или 0,5 – коэффициент резервирования (100% или 50%);
kn = 0,7 – 0,6 – скоростной коэффициент (рекомендуется для повышения ресурса насоса уменьшать частоту вращения насоса на 30-40%).
–Максимальное давление в цилиндрах
 =
= Н/м2;
Н/м2;
–По PNKAT. и QH. выбираем насос
Тип
гидравлического насоса ЭМН-9/1-4
 Н/м2
Н/м2
Наибольшая теоретическая производительность QTmax=0,0048 м3/с.
Частота вращения приведенного вала nнас=1000 об/мин.
7.2.9 Определение номинальных параметров электродвигателя
гидравлического насоса
–Обороты электродвигателя выбираем по номинальным оборотам насоса с учетом принятого запаса для повышения его ресурса
nH (70-60%) nHАС=0,7∙1000≈700 об/мин;
–Мощность, необходимая для вращения насоса при номинальном давлении PN.KAT. и
max = 0,9-0,95, определяют по формуле:
 ;
;
– Выбираем двигатель
Двигатель асинхронный

–Расчет механических характеристик = f(M) двигателя по каталожным данным.
Номинальный момент электродвигателя:
 Нм;
Нм;
Номинальное скольжение
 ,
,
Частота вращения электродвигателя
ΩН=ΩО(1-SH)=78,5∙(1-0,027)=76,4 рад/с,
где

–Критическое скольжение

где

–Критическая частота вращения
ΩКР=ΩО∙(1-SКР)=78,5∙(1-0,104)=70,361 рад/с