

Розділ 5
π |
− α > ϕ, |
(5.5) |
2 |
|
|
де α — кут установлення фронтальної кромки пасивного стеблепі- діймача до горизонту; ϕ — кут тертя стебла об кромку стеблепідій- мача.
Довжина стебла, на яку діє поверхня стеблепідіймача при пере- міщенні її на одну й ту саму відстань, збільшується зі збільшенням кутів α і ϕ. Унаслідок цього більша кількість стебел накопичується на робочій поверхні. При цьому поверхня забивається і розділення переплутаних стебел погіршується.
Зі збільшенням виносу носка стеблепідіймача відносно різально- го апарата і кута α встановлювальну висоту зрізу різального апара- та потрібно зменшувати. Невиконання цієї умови призведе до зрізу- вання стебел у зоні розміщення бобів, волоті чи колоса.
5.2. Мотовила
5.2.1. Призначення, типи і застосування мотовил
Мотовило як робочий орган жатки відоме з 1822 р. Ним облад- нують валкові жатки, жатки зернозбиральних комбайнів, жатки для збирання трав і грубостеблових культур кормозбиральних ком- байнів. Воно призначене для відокремлення певної смуги хлібостою (травостою) по ширині захвату жатки, підведення її до різального апарата, підтримування під час зрізування, укладання зрізаної ма- си на транспортувальний пристрій чи стерню та очищення різаль- ного апарата.
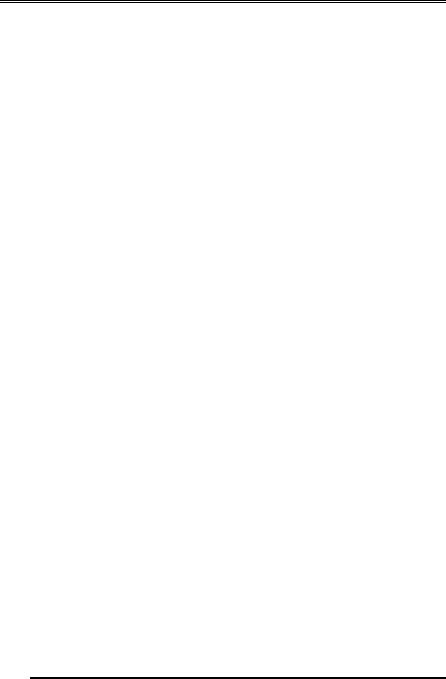
За будовою і принципом дії мотовила поділяють на: звичайні (жорсткопланчасті радіальні, рис. 5.7, а), універсальні (паралелог- рамні, ексцентрикові, рис. 5.7, б) та копіювальні (рис. 5.7, г).
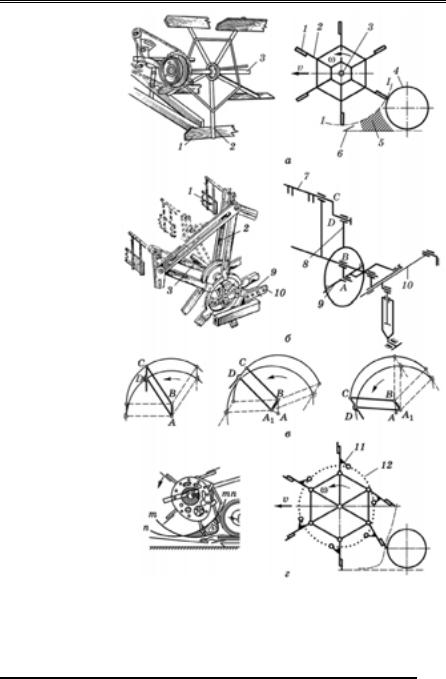
Звичайне мотовило (рис. 5.7, а) складається із вала 3, до якого жорстко прикріплено промені 2, а до них — лопаті 1. Під час обер- тання вала лопаті здійснюють обертальний рух, почергово входять у хлібну (трав’яну) масу і відокремлюють смугу стебел (рис. 5.8, а). Таке положення лопатей правильне для збирання прямостоячого хлібостою. Якщо при збиранні полеглих хлібів лопаті встановлено вертикально або з нахилом уперед (рис. 5.8, б), то вони не підводять стебла до різального апарата, а притискують їх до землі. У цьому разі лопаті бажано встановлювати з нахилом назад (рис. 5.8, в). Зміна кута нахилу лопатей залежно від стану хлібостою на такому типі мотовила зумовлює певні труднощі. Ось чому звичайні мотови- ла застосовують лише при збиранні прямостоячого стеблостою, що виправдано, адже такі мотовила прості за будовою і мають порівня- но невелику масу.
204
Основи теорії та розрахунку косарок, косарок-плющилок …
Рис. 5.7. Мотови- ла:
а — звичайне; б |
— |
|||
універсальне; |
в |
— |
||
розміщення повідця |
||||
універсального |
|
мо- |
||
товила у вертикаль- |
||||
ному, лівому і пра- |
||||
вому |
положеннях; |
|||
г— копіювальне; 1 — |
||||
лопать; 2 — промінь; |
||||
3 — вал; 4 — шнек; |
||||
5 і А — «мертві зо- |
||||
ни»; 6 — |
різальний |
|||
апарат; 7 — грабли- |
||||
на; 8 — промінь |
||||
обойми |
ексцентри- |
|||
кового |
|
механізму; |
||
9 — роликовий брус; |
||||
10 — |
кронштейн |
|||
підтримки мотовила; |
||||
11 — повідець лопа- |
||||
ті; 12 — бігова дорі- |
||||
жка; І – І |
і n – n |
— |
||
траєкторії |
кінцевої |
|||
точки |
лопаті |
зви- |
||
чайного |
мотовила; |
|||
m – m — траєкторія |
||||
кінцевої точки лопа- |
||||
ті |
копіювального |
|||
мотовила |
|
|
|
|
Універсальне мотовило також складається з вала 3 (рис. 5.7, б), до якого жорстко прикріплено промені 2. Лопаті 1 жорстко прикріп- лено до граблин 7, які шарнірно з’єднані з променями. Граблини мають кривошипи CD, які шарнірно з’єднані з променями 8 обойми
205
Розділ 5
|
ексцентрикового |
механізму. |
|
|
Довжина AB повідця цього ме- |
||
|
ханізму дорівнює довжині кри- |
||
|
вошипа. Завдяки такій конс- |
||
|
трукції мотовила |
утворюється |
|
|
паралелограмний |
механізм |
|
|
ABCD (рис. 5.7, в), що дає змогу |
||
|
лопатям (пальцям граблин) |
||
|
зберігати |
сталим, |
попередньо |
|
встановленим кут нахилу при |
||
Рис. 5.8. Схема роботи мотовила при |
обертанні вала мотовила і змі- |
||
збиранні стеблостою: |
нювати його залежно від стану |
||
а — прямостоячого; б, в — полеглого; |
хлібостою, |
зміщуючи повідець |
|
1 — лопать; 2 — різальний апарат |
AB. При |
вертикальному роз- |
|
міщенні повідця граблини вхо- дять у стеблостій вертикально, при зміщенні вперед — з нахи-
лом уперед, при зміщенні назад — з нахилом назад. Це досягається зміщенням роликового бруса 9 (рис. 5.7, б) по отворах у кронштей- ні 10 або автоматично за допомогою копіра при підніманні чи опус- канні мотовила.
Універсальне мотовило називають ще мотовилом О.А. Клія, яке застосовували на жатках причіпних комбайнів типу С-6. Таке мото- вило за будовою складніше і має більшу масу порівняно зі звичай- ним (радіальним), але воно стійко виконує технологічний процес як на прямостоячому, так і на полеглому стеблостої. Тому його широко застосовують на жатках для збирання хлібів.
Як звичайне, так і універсальне мотовила незадовільно працю- ють на короткостебловому (менше ніж 40 см) і зрідженому (менш як 500 шт. на 1 м2) стеблостоях. Річ у тім, що кінці планок мотовила, обертаючись по траєкторії I – I (див. рис. 5.7, а), розміщуються на великій відстані від різального апарата 6 і не знімають з нього зрі- заних стебел, унаслідок чого вони падають на землю. Крім цього, між траєкторією I – I і шнеком 4 утворюється так звана «мертва зо- на» 5, в якій накопичується зрізана маса. Це призводить до нерів- номірності подачі, а в цілому до пульсуючого навантаження на ро- бочі органи збиральної машини. Ось чому виникла потреба у пошу- ках нового типу мотовила — копіювального.
Копіювальне мотовило має лопаті, які шарнірно прикріплено до променів, а їхні повідці 11 (рис. 5.7, г) рухаються по спеціальній біговій доріжці 12, в результаті чого усувається «мертва зона». Та- ким мотовилом обладнують жатки для збирання низькорослих зер- нових культур, а також жатки для збирання трав.
206

Основи теорії та розрахунку косарок, косарок-плющилок …
5.2.2. Основи теорії та розрахунку мотовил
Траєкторія абсолютного руху точки лопаті звичайного мо-
товила. Маємо мотовило радіусом R, кутову швидкість його ω та швидкість машини vм (рис. 5.9).
Вибираємо систему координат хOу. Розглянемо рух точки А. Нехай за певний час t точка А переміс- титься в точку А1 при обертальному
русі, тобто промінь ОА повернеться на кут ϕ = ωt. За цей самий час вал мотовила за рахунок швидкості ма- шини зміститься на відстань ОО1,
тобто OO1 = vмt. Тому і точка А1 змі-
ститься в напрямку осі х на таку са- му відстань vмt, тобто в точку A2.
Тоді траєкторія точки А в абсолют- ному русі визначиться лінією АА2.
Переміщення точки А в напрям- ку осі х опишемо рівнянням
Рис. 5.9. До побудови траєкторії точки лопаті мотовила
xA = x +vмt = Rcos ωt +vмt, (5.6) |
|
а в напрямку осі у — |
|
y = Rsin ωt. |
(5.7) |
Рівняння (5.6) і (5.7) описують траєкторію руху будь-якої точки
лопаті мотовила.
Знаючи значення R, ω, vм і кут повороту ϕ, наприклад
ϕ = ωt = 60° = 3π, можна визначити координати хA і уA, а саме:
x |
A |
= R cos |
π |
+v |
π |
; |
3 |
|
|||||
|
|
м 3ω |
|
|||
yA = Rsin 3π.
Задавшись значенням ϕ, через певні проміжки можна аналітич- но визначити координати при певному куті повороту.
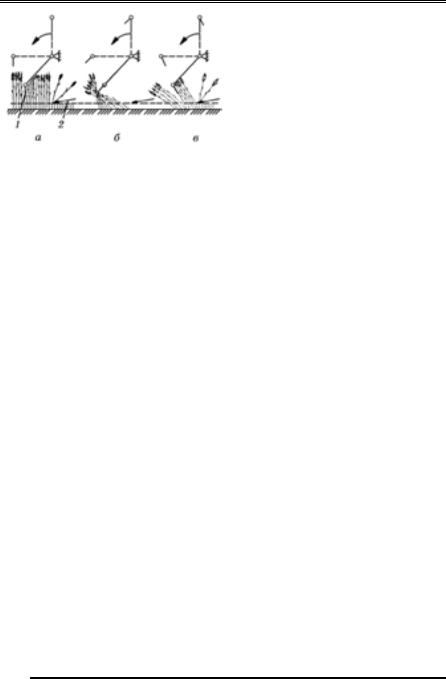
У результаті підрахунків і при коловій швидкості и мотовила, бі- льшій від швидкості vм, траєкторія матиме вигляд видовженої цик-
лоїди за один оберт мотовила (рис. 5.10).
Дотична у будь-якій точці цієї траєкторії визначить напрямок абсолютної швидкості иа точки лопаті.
207

Розділ 5
|
Таку траєкторію мо- |
||||
|
жна |
побудувати |
також |
||
|
графічним |
способом. |
|||
|
Для цього коло діамет- |
||||
|
ром, який дорівнює ді- |
||||
|
аметру |
D |
мотовила |
||
|
(див. рис. 5.10), поділя- |
||||
|
ють |
на |
кілька |
рівних |
|
|
між собою частин, на- |
||||
|
приклад на 12. На таку |
||||
Рис. 5.10. Траєкторія абсолютного руху точки |
саму |
кількість |
частин |
||
лопаті мотовила |
поділяють і відстань S. |
||||
|
Із точок поділу S — 1′, |
||||
2′, 3′ і т.д. — проводять промені 1′ – 1′′, 2′ – 2′′, 3′ – 3′′ і т.д. паралельно променям 0′ − 1, 0′ − 2, 0′ − 3 і т.д., довжина яких дорівнює радіусу R = D / 2 мотови-
ла. Точки 1′′, 2′′, 3′′ і т.д. і визначать форму траєкторії.
Відстань S — це шлях, який проходить машина за час t одного
оберту мотовила, тобто |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
S = vмt. |
|
|
|
(5.8) |
||
Оскільки t = 60 |
, або t = |
2π |
|
, де n — частота обертання мотовила, |
|||||||||
ω |
|||||||||||||
|
n |
|
|
|
|
|
πn |
|
|
||||
об/хв; ω — кутова швидкість мотовила, ω = |
, с–1, то |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
S = v |
60 |
= v |
2π |
= v |
2πR |
= 2πR , |
(5.9) |
||||
|
|
|
м n |
|
м ω |
м |
u |
|
λ |
|
|||
де u = ωR; λ = |
u |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
v |
|
|
|
|
|
|
|
|
|
|
||
|
м |
|
|
|
|
|
|
|
|
|
|
||
Кінематичний режим роботи мотовила — це співвідношення колової швидкості и мотовила до швидкості машини vм:
λ = |
u |
. |
(5.10) |
|
|||
|
v |
|
|
|
м |
|
|
У реальних умовах λ = 1,2…1,8. Неправильно вибраний λ під час експлуатації збиральних машин призводить до того, що мотовило відштовхує стебла від різального апарата (λ < 1) або не бере участі в технологічному процесі (λ = 1). При збільшенні λ ширина В петлі траєкторії також збільшується (рис. 5.11), а отже, збільшується ши- рина смуги стебел, що підводиться до різального апарата.
208
Основи теорії та розрахунку косарок, косарок-плющилок …
Рис. 5.12. Можливе розміщення ножа відносно траєкторії абсо- лютного руху точки лопаті мо-
Рис. 5.11. Траєкторії абсолютно- товила го руху точки лопаті мотовила
при різних значеннях кінематичного режиму
Колова швидкість мотовила. Смуга стебел, що підводиться до різального апарата, може дорівнювати ширині В (рис. 5.12) петлі, коли ніж перебуває в положенні I, а вал мотовила — в положенні с, і B / 2, коли ніж — у положенні II, а вал — у положенні b. Стебла не
підводитимуться, якщо ніж буде в положенні III, а вал — у поло- женні а.
Отже, чим більша ширина петлі, тим більша ширина смуги сте- бел підводитиметься до різального апарата. Із рис. 5.11 видно, що ширина петлі збільшується при збільшенні λ, тобто колової швид- кості и мотовила (и = 1,8vм). Зменшувати швидкість машини не ба-
жано заради збільшення λ, оскільки це призведе до зменшення продуктивності збирального агрегату.
Таким чином, з метою поліпшення ефективності роботи мотовила доцільно збільшувати його колову швидкість, але в певних межах, адже може виникнути ймовірність вимолоту зерна із колоса.
Розглянемо це на прикладі.
Із практики відомо, що обмолот зерна із колоса починається при витраті енергії W = 0,02 Н·см, а
W = |
mu2 |
, |
(5.11) |
|
2 |
||||
|
|
|
де m — маса зернини; и — колова швидкість мотовила (беремо ко- лову и, а не абсолютну иа швидкість, оскільки и може бути більшою, ніж иа залежно від кута повороту мотовила).
209
Розділ 5
Оскільки
m = Gg ,
де G — вага зернини, Н (G = 4·10–4 Н для пшениці); g = 9,81 — прискорення вільного падіння, м/с2, то
u = |
2W |
= |
2 2 10−2 |
≈ 3 м/с. |
|
m |
4 10−7 |
||||
|
|
|
Отже, розрахунки свідчать, що колову швидкість мотовила треба брати не більше ніж 3 м/с.
У конструкціях мотовил жаток зернозбиральних комбайнів «Ни- ва», «Колос» та «Дон» така умова, як правило, виконується. Так, ді- аметр мотовил становить 1160…1200 мм, а частота обертання —
15…52 об/хв, що відповідає и = 0,91…3,26 м/с.
Висота установлення вала мотовила над різальним апара-
том. Лопать мотовила має входити у хлібостій тоді, коли проекція абсо- лютної швидкості иа та її точки А на
вісь х дорівнюватиме нулю, тобто иа
буде направлена вертикально вниз (рис. 5.13). У цьому разі усувається відштовхування смуги стебел від різального апарата і удар лопаті по колосу в момент входження в хлібну масу.
Рівняння руху точки лопаті в на- прямку осі х відомо (5.6):
Рис. 5.13. До визначення висоти |
|
|
|
xA = Rcos ωt +vмt. |
|
|
|
Перша похідна від переміщення |
|||||
установлення вала мотовила і |
|
|||||
його радіуса |
|
хА, тобто абсолютна швидкість у на- |
||||
|
.& |
прямку осі х становить |
|
|||
|
|
|
|
+vм. |
(5.12) |
|
. |
xA = −Rωsin ωt |
|||||
то з рівняння (5.12) матимемо |
|
|||||
Оскільки xA = 0, |
|
|||||
& |
|
|
|
|
|
|
|
sin ωt = |
v м |
= |
1 , |
(5.13) |
|
|
|
|||||
|
|
|
ωR |
λ |
|
|
210

Основи теорії та розрахунку косарок, косарок-плющилок …
де ωR = u — колова швидкість точки лопаті; λ = |
u |
— кінематич- |
|
v |
|||
|
|
||
ний режим роботи. |
м |
|
|
Рівняння руху точки лопаті в напрямку осі у також відомо (5.7): |
|||
yA = Rsin ωt. |
|
|
|
Беручи до уваги рівняння (5.13), отримаємо |
|
|
|
yA = R 1 . |
|
(5.14) |
|
λ |
|
|
|
Із рис. 5.13 видно, що висота Н установлення вала мотовила до- рівнюватиме
H + h = l + yA , |
|
||
де h — висота установлення ножа; l – довжина стебла. |
|
||
Ураховуючи рівняння (5.14), можна записати: |
|
||
H = l − h + R |
vм |
. |
(5.15) |
|
|||
|
u |
|
|
Із рівняння (5.15) видно, що висота установлення мотовила за- лежить не тільки від l, h, R, а й від кінематичного режиму роботи мотовила.
Радіус мотовила. Лопать має діяти на стебло вище від центра його маси, якщо вона перебуває в крайньому нижньому положенні, щоб унеможливити перекидання стебла через лопать уперед. Центр маси стебла зернових культур, як правило, розміщується на висоті 1/3 l від верхівки колоса (волоті).
Отже, згідно з рис. 5.13 нормальна робота мотовила зумовлюєть-
ся рівнянням |
|
|
H + h > |
2 l + R, |
(5.16) |
|
3 max |
|
де lmax — максимальна довжина стебла.
Підставивши значення Н із рівняння (5.15) у рівняння (5.16), ді-
станемо |
|
|
|
|
|
R < |
ulmax |
|
. |
(5.17) |
|
3(u −v |
) |
||||
|
|
|
|||
|
м |
|
|
|
Проте радіус мотовила має бути меншим, ніж найменша висота розміщення вала над різальним апаратом, тобто
211
Розділ 5
R < Hmin = lmin − hmax + R vuм ,
або
R < |
u(lmin − hmax ) |
. |
(5.18) |
|
|||
|
u −vм |
|
|
Таким чином, радіус мотовила визначається найменшим зна- ченням, обчисленим за залежностями (5.17) і (5.18).
Радіус мотовила жаток вітчизняних і зарубіжних зернозбираль- них комбайнів становить R = 535…600 мм, мінімальна висота роз-
міщення вала над різальним апаратом — Hmin = 640...950 мм, мак-
симальна Hmax = 1060...1500 мм.
У жатках кормозбиральних комбайнів для збирання високостеб- лових культур, наприклад кукурудзи, R = 900…1400 мм (причому може регулюватися), а Hmax = 4600 мм.
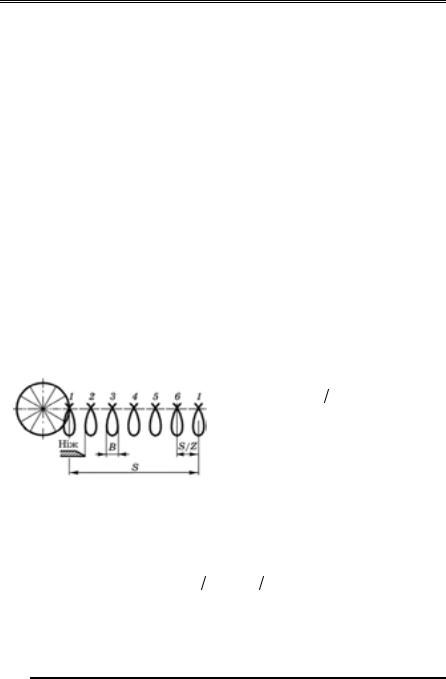
Ступінь дії мотовила на стеблову масу. За один оберт мото-
вила на стеблостій послідовно діятимуть усі його Z лопатей (рис. 5.14), у цьому разі Z = 6. Відстань між петлями траєкторій суміжних планок називають кроком мотовила. Згідно з рівнянням (5.9) він становить
S = 2πR |
= S . |
|
(5.19) |
|
Z |
Zλ |
Z |
|
|
|
|
|
||
|
|
Якщо крок дорівнює ширині |
||
|
петлі, тобто |
S Z = B, |
а ніж роз- |
|
|
міщується |
відносно |
траєкторії, |
|
|
як показано на рис. 5.14, то всі |
|||
|
стебла на шляху S підводяться |
|||
|
до різального апарата. Якщо |
|||
|
траєкторії (петлі) не стикаються |
|||
|
між собою |
(див. рис. 5.14), то |
||
Рис. 5.14. До визначення ступеня дії |
лише певна частина стебел під- |
|
мотовила на хлібну масу |
водитиметься до різального апа- |
|
|
рата, що характеризується па- |
|
|
раметром, який називають сту- |
|
пенем дії η мотовила на стеблову масу, тобто |
|
|
η = B SZ = BZ S. |
(5.20) |
|
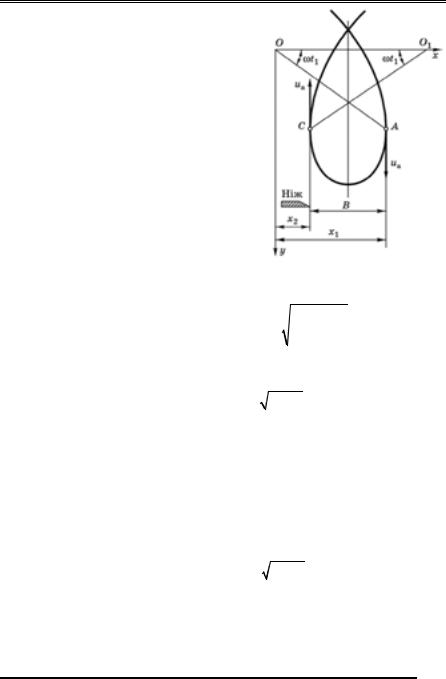
Ширину петлі можна визначити з таких міркувань. |
|
|
Із рис. 5.15 видно, що |
|
|
B = x1 − x2 , |
(5.21) |
|
212
Основи теорії та розрахунку косарок, косарок-плющилок …
де (див. залежність (5.6)) x1 = R cos ωt1 +
+ vмt1 , x2 = R cos(π − ωt1 ) +vмt2.
Тоді
B = vмt1 −vмt2 + 2R cos ωt1. |
(5.22) |
||||||||||
Беручи до уваги співвідношення |
|||||||||||
|
vмt1 |
= ωt1 |
; |
vмt2 |
= |
|
π − ωt1 |
, |
|||
|
S |
|
|
||||||||
|
2π |
|
S |
2π |
|
||||||
а також те, що |
sin ωt = |
vм |
(див. зале- |
||||||||
|
|||||||||||
|
|
|
|
|
vм |
u |
|
||||
жність 5.13)), S = 2πR |
(див. залеж- |
||||||||||
|
|||||||||||
|
|
|
|
|
|
u |
|
|
|
||
ність (5.9)), замінивши косинус синусом і виразивши кути через обернені три- гонометричні функції, отримаємо
Рис. 5.15. До визначення ши- рини петлі траєкторії
B = 2R |
v |
|
v |
π |
+ 2R |
v |
2 |
(5.23) |
||
м |
arcsin |
м − |
2 |
|
1 − |
м |
. |
|||
|
u |
|
u |
|
|
|
u |
|
|
|
Підставивши значення В у залежність (5.20), матимемо
η = |
Z |
1 |
− |
π |
+ λ2 |
−1 |
|
(5.24) |
arcsin |
λ |
2 |
. |
|||||
|
π |
|
|
|
|
|
Нагадаємо, що залежність (5.24) дійсна для випадку, коли точка С (рис. 5.15) траєкторії і ніж розміщуються на одній і тій самій вер- тикальній лінії, а вал мотовила винесений вперед у точку O1.
Для випадку, коли вал мотовила (точка 6′) і ніж знаходяться на одній вертикальній лінії (рис. 5.10), смуга стебел, що підводиться до різального апарата дорівнюватиме половині ширини петлі й тому ступінь дії буде вдвічі менший, тобто
|
Z |
|
1 |
|
π |
+ λ2 |
|
|
(5.25) |
η = |
|
arcsin |
λ |
− |
2 |
−1 |
. |
||
|
|||||||||
|
2π |
|
|
|
|
|
|||
Ступінь дії мотовила можна визначити також графоаналітичним способом. Для цього потрібно побудувати траєкторію абсолютного руху точки лопаті (див. рис. 5.10), заміряти S і ширину смуги стебел,
213

Розділ 5
що підводиться до різального апарата (у цьому разі ∆x = B / 2 ), і об- числити η за залежністю
η = |
Z∆x . |
(5.26) |
|
S |
|
Щоб проаналізувати, як впливає кінематичний режим роботи мотовила на ступінь його дії, доцільно скористатися аналітичними
залежностями (5.24) і (5.25). |
|
|
|
|
|
|
|
|
|
u |
|
|
|
||||
Так, при кінематичному режимі роботи |
λ = |
|
|
=1 ступінь дії |
|||||||||||||
v |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(див. (5.24)) |
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
η = |
Z |
1 |
− |
π |
+ |
12 |
−1 |
|
= |
Z π |
− |
π |
+ 0 |
|
= 0, |
||
arcsin |
1 |
2 |
|
|
2 |
|
|||||||||||
|
π |
|
|
|
|
|
|
π 2 |
|
|
|
|
|
||||
тобто мотовило не бере участі в технологічному процесі.
Винос мотовила. Якщо різальний апарат розмістити на одній вертикалі з валом мотовила (рис. 5.16, а), то укладання зрізаного стеблостою на конвеєр буде задовільним, оскільки абсо- лютна швидкість лопаті на- прямлена в протилежному напрямку до швидкості ма- шини. Проте ступінь дії мо- товила буде незначним, оскільки половина ширини петлі бере участь у процесі.
Якщо ніж розмістити на одній вертикалі з точкою С траєкторії (рис. 5.16, б), то укладання зрізаної маси на конвеєр буде незадовільним, проте ступінь дії мотовила буде вдвічі більший. При
|
цьому винос bmax вала мо- |
|
|
товила відносно |
різального |
|
апарата максимальний. |
|
Рис. 5.16. Розміщення ножа на одній вер- |
Щоб задовольнити умови |
|
тикалі з валом мотовила (а) і при макси- |
оптимального |
укладання |
мальному виносі вала (б) |
маси і ступеня дії, ніж по- |
|
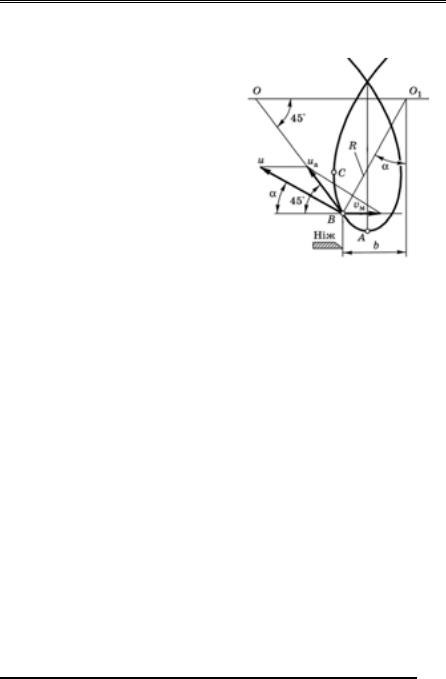
трібно розміщувати на вертикалі з точкою траєкторії, яка лежить у проміжку між точками А і С (рис. 5.17).
214
Основи теорії та розрахунку косарок, косарок-плющилок …
Вважають, що такою точкою може бути точка В, в якій дотична до траєкторії (напрямок абсолютної швидкості ua мотовила) утворює
з напрямком переміщення вала мотовила (горизонтом) кут 45°.
Тоді оптимальний винос b ва- ла мотовила (див. рис. 5.17) мож- на визначити за формулою
b = Rsin α, |
(5.27) |
де R — радіус мотовила; α — кут між напрямком колової швидкос- ті и мотовила і горизонтом.
Синус кута α визначають за теоремою синусів, виходячи із трикутника швидкостей, а саме:
|
vм |
= |
u |
. |
(5.28) |
|
|
|
|
|
|
|
|
|
|
|
|
|
sin(45° − α) |
sin135° |
|
|
|
|
Рис. 5.17. До визначення |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Розклавши синус різниці і су- |
|
|
|
|
|
|
оптимального виносу |
||||||||||
|
|
|
|
|
|
|
|
|
вала мотовила |
||||||||
ми кутів, отримаємо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
vм |
= cos α − sin α. |
|
|
|
|
|||||||
|
|
|
|
|
u |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Після перетворень, тобто |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
v |
2 |
|
|
|
|
|
2 |
; |
|
|
||||
|
|
|
|
м |
|
= (cos α − sin α) |
|
|
|
||||||||
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2cos αsin α = sin 2α, |
|
|
|
|
|||||||||
отримаємо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
sin 2α =1 − |
м |
|
=1 − |
|
|
|
, |
|||||||
|
|
|
λ2 |
|
|||||||||||||
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
||
або |
|
|
|
|
|
|
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
arcsin 1 − |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
λ |
2 |
|
|
|
|
|
|||||
|
|
|
|
α = |
|
|
|
|
|
|
. |
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.29)
(5.30)
(5.31)
215

Розділ 5
Підставивши значення α із залежності (5.31) у залежність (5.27),
визначимо оптимальний винос мотовила.
У жатках зернозбиральних комбайнів вітчизняного та зарубіжно-
го виробництва кількість планок Z = 5; 6, винос bmin = 125...380 мм, bmax = 400...700 мм.
Потужність на привід мотовила складається із потужності на холостий хід Nx.x і на підведення смуги стебел до різального апара-
та Nп, тобто
N = Nх.х + Nп; |
(5.32) |
Nх.х = Mкрω, |
(5.33) |
де Мкр — крутний момент на валу мотовила; ω — кутова швидкість мотовила;
Мкр = G d f, |
(5.34) |
2 |
|
де G — сила ваги мотовила; d — діаметр мотовила; f — коефіцієнт тертя вала;
Nп = η |
mи2 |
, |
(5.35) |
|
2 |
||||
|
|
|
де η — ступінь дії мотовила на хлібну масу; т — масова подача хліб- ної маси за одиницю часу; и — колова швидкість мотовила;
m = q |
, |
(5.36) |
g |
|
|
де q — подача хлібної маси до шнека жатки за одиницю часу; g — прискорення вільного падіння;
q = QBvм, |
(5.37) |
де Q — врожайність хлібної маси; B — ширина жатки; vм — швид- кість машини.
Підставивши значення Nx.x |
та Nп у залежність (5.32), остаточно |
|
отримаємо |
|
|
N = G d fω+ ηQBvм u2. |
(5.38) |
|
2 |
2g |
|
216