Приклад к2
Дано: r2 = 3 см, R2 = 6 см, r3 = 4 см, R3 = 8 см, S1 = 2t3 (S – у сантиметрах).
Визначити:
![]() в момент часу t1
= 1с.
в момент часу t1
= 1с.

Розв'язання.1. Визначимо кутову швидкість та кутове прискорення колеса 2. Знаючи закон руху вантажу 1, знаходимо його швидкість як функцію часу:
![]() .
(2.1)
.
(2.1)
Ураховуючи,
що
![]() ,
знаходимо
,
знаходимо
![]() .
(2.2)
.
(2.2)
Для моменту часу t1 = 1с одержуємо
![]() .
.
2. Визначимо кутову швидкість та кутове прискорення колеса 3. Оскільки колеса 2 та 3 пов'язані пасовою передачею, то
![]() .
(2.3)
.
(2.3)
Для моменту часу t1 = 1с одержуємо
![]() .
.
3.
Визначимо швидкості VA
та V4.
Оскільки
![]() і
і![]() ,
то для моменту часуt1
= 1с
маємо
,
то для моменту часуt1
= 1с
маємо
![]() .
.
4. Визначимо прискорення ас. Ураховуючи, що
![]() ,
(2.4)
,
(2.4)
де
![]() ,
для моменту часуt1
= 1с
одержуємо
,
для моменту часуt1
= 1с
одержуємо
![]() .
.
Відповідь:
![]()
![]()
![]()
![]()
![]()
![]()
![]() .
.
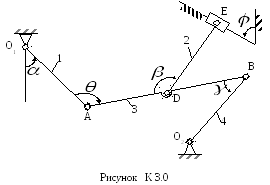
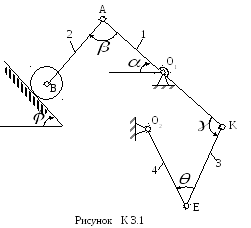
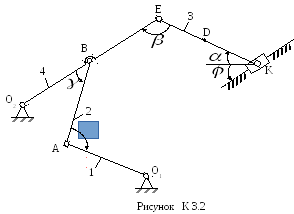
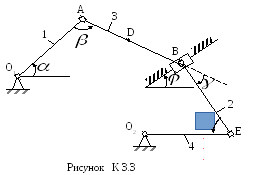
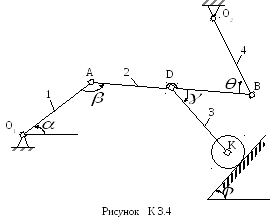
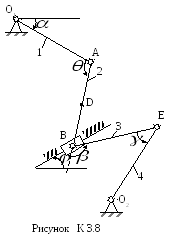
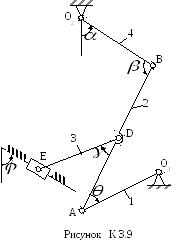
Задача к3
Плоский
механізм складається зі стрижнів 1 –
4, повзуна або колеса 5, з'єднаних між
собою нерухомими опорами та шарнірами;
точки, що розташовані не на кінцях
стрижнів, знаходяться посередині
відповідних стрижнів. Довжина стрижнів
дорівнює відповідно:
![]() ,
,![]() ,
,![]() ,
,![]() ,
радіус колеса
,
радіус колеса![]() .
.
Положення
механізму визначається кутами
![]() ,
значення яких подано в таблиці К3. Дугові
стрілки на рисунках указують, як під
час побудови схеми механізму повинні
відкладатися відповідні кути. Побудову
схеми починати зі стрижня, напрямок
якого визначається кутом
,
значення яких подано в таблиці К3. Дугові
стрілки на рисунках указують, як під
час побудови схеми механізму повинні
відкладатися відповідні кути. Побудову
схеми починати зі стрижня, напрямок
якого визначається кутом![]() .
.
Рух
механізму задається законом обертання
стрижня 1 –
![]() ,
який подається в таблиці К3. Додатний
напрямок відліку кута
,
який подається в таблиці К3. Додатний
напрямок відліку кута![]() вважати проти ходу годинникової стрілки.
вважати проти ходу годинникової стрілки.
Визначити кутові швидкості всіх ланок механізму, кутове прискорення стрижня АВ, швидкості всіх точок механізму та прискорення точки В в момент часу t1 = 1с.
Указівка. Задача К3 – на дослідження плоскопаралельного руху твердого тіла. Під час розв'язування задачі для визначення швидкостей точок механізму та кутових швидкостей його ланок слід скористатися поняттям про миттєвий центр швидкостей, застосовуючи його до кожної ланки механізму окремо.
Визначаючи
прискорення точок механізму, виходити
з векторного рівняння
![]() .
Якщо точка В рухається непрямолінійно,
то
.
Якщо точка В рухається непрямолінійно,
то![]() також слід подати двома складовими
також слід подати двома складовими
![]() .
Тоді векторне рівняння матиме вигляд:
.
Тоді векторне рівняння матиме вигляд:
![]() .
.
При
цьому вектор нормального прискорення
![]() відомий як за напрямом (уздовж ВО2
до точки О2),
так і за модулем:
відомий як за напрямом (уздовж ВО2
до точки О2),
так і за модулем:
![]() .
Вектор
.
Вектор![]() направлений перпендикулярно до ВО2
в будь-який бік. Після проектування
поданого векторного рівняння на два
будь-яких напрямки одержимо невідомі
величини –
направлений перпендикулярно до ВО2
в будь-який бік. Після проектування
поданого векторного рівняння на два
будь-яких напрямки одержимо невідомі
величини –
![]() та
та![]() .
Тоді
.
Тоді![]() .
Прискорення
.
Прискорення![]() необхідне для визначення
необхідне для визначення![]() .
.
Таблиця к3
|
Номер умови |
|
Кути | ||||
|
|
|
|
|
| ||
|
0 |
|
90 |
120 |
90 |
90 |
60 |
|
1 |
|
0 |
150 |
30 |
0 |
60 |
|
2 |
|
60 |
150 |
120 |
90 |
30 |
|
3 |
|
30 |
120 |
30 |
0 |
60 |
|
4 |
|
0 |
60 |
30 |
0 |
120 |
|
5 |
|
90 |
150 |
120 |
90 |
60 |
|
6 |
|
30 |
150 |
120 |
0 |
30 |
|
7 |
|
60 |
60 |
60 |
90 |
150 |
|
8 |
|
30 |
120 |
120 |
0 |
60 |
|
9 |
|
0 |
120 |
120 |
0 |
30 |