

Шпоры / шпоры тау / 2006 г. ЭВТд-ТАУ / 3-2005г.Реал.ПД-рег.-расч.сист.по кан.управления
.doc
Реализация ПД-регулятора
С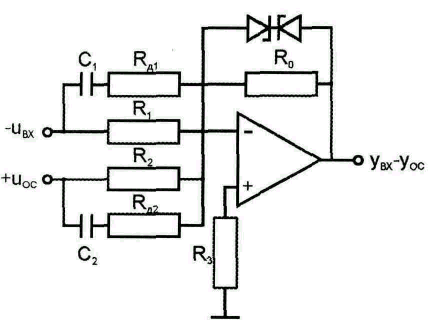 игналы
входного воздействия и обратной связи
суммируются просто.
игналы
входного воздействия и обратной связи
суммируются просто.
Если изменить знаки входного воздействия и обратной связи, то к выходу регулятора следует подключить инвертор.
Стабилитроны в обратной связи операционного усилителя предназначены для ограничения уровня выходного сигнала заданной величиной.
Во
входных цепях
![]() и
и
![]() включаются по необходимости. Желательно,
чтобы
включаются по необходимости. Желательно,
чтобы
![]() .
Если исключить
.
Если исключить
![]() ,
то усилитель из-за действия помех может
войти в режим насыщения. Подбираются
,
то усилитель из-за действия помех может
войти в режим насыщения. Подбираются
![]() (величина
(величина
![]() до 20 кОм).
до 20 кОм).
Требования к усилителю постоянного тока:
Тип усилителя, например, К140УД6.
-
Большой коэффициент усиления по напряжению: (40400)103.
-
Малый дрейф нуля.
-
Большое входное сопротивление (100кОм-3МОм).
-
Малое выходное сопротивление (десятки Ом).
Если допускаются большие габариты конденсаторов, то используют:
-
Бумажные металлизированные МБГП;
-
Бумажные полистироловые МПГП;
-
Бумажные фторопластовые МФГП.
Передаточная функция регулятора по каналу управления:

![]() .
.
ПИ-регулятор
(изодромный регулятор)


![]() ;
;
на
низких частотах преобладает интегрирующий
эффект (отсутствует статическая ошибка),а
на высоких частотах – эффект от
![]() (качество переходного процесса лучше,
чем при И-законе регулирования).
(качество переходного процесса лучше,
чем при И-законе регулирования).
![]() – закон
регулирования.
– закон
регулирования.

-
– отсутствие регулятора;
-
– П-регулятор;
-
– ПИ-регулятор.
Достоинства:
-
Простота реализации;
-
Существенно улучшает точность регулирования в статике:
• Установившаяся ошибка при постоянном входном воздействии равна нулю;
• Эта ошибка нечувствительна к изменениям параметров объекта.
Недостатки:
повышается астатизм системы на единицу
и, как следствие, снижение запасов
устойчивости, увеличивается колебательность
переходного процесса, увеличивается
![]() .
.
Реализация ПИ-регулятора


ПИД-регулятор
На низких частотах преобладает интегрирующий эффект, а на высоких – дифференцирующий.
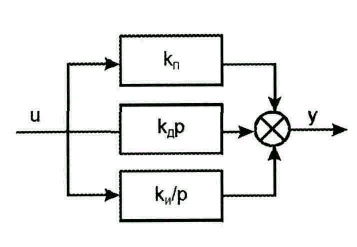
![]() .
.
![]() – закон
регулирования.
– закон
регулирования.
Статическая система при установке ПИД-регулятора становится астатической (статическая ошибка равна нулю), однако в динамике астатизм снимается за счет действия дифференцирующей составляющей, т. е. качество переходного процесса улучшается.
 Достоинства:
Достоинства:
-
Высокая статическая точность;
-
Высокое быстродействие;
-
Большой запас устойчивости.
Недостатки:
-
Применимы для систем, описываемых
дифференциальными уравнениями невысокого
порядка, когда объект имеет один или два полюса,
или может быть аппроксимирован моделью второго
порядка.
-
Требования к качеству управления низкие.
Реализация ПИД-регулятора
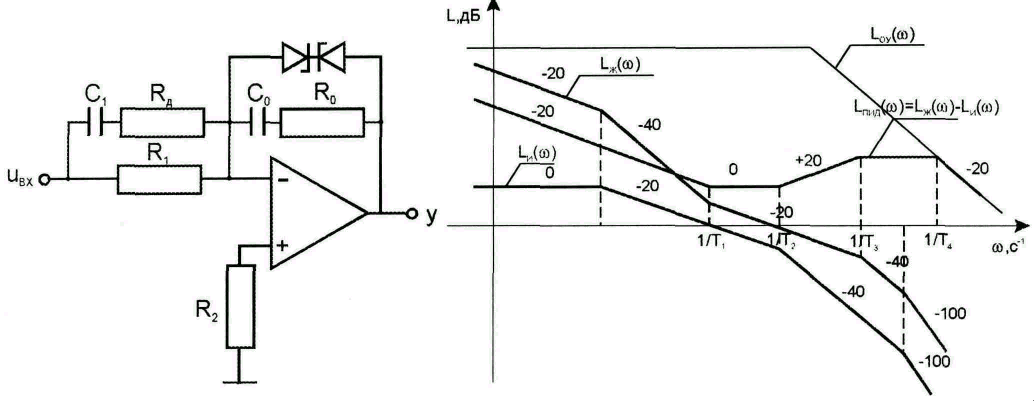

где
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
причем
,
причем
![]() .
.
По
ЛАЧХ операционного усилителя определяем
![]() .
Тогда передаточная функция реального
регулятора имеет вид
.
Тогда передаточная функция реального
регулятора имеет вид
![]() .
.
В системах чаще всего применяется ПИД-регулятор.
Расчёт систем комбинированного управления
Комбинированное – такое управление в автоматической системе, когда наряду с замкнутым контуром регулирования по отклонению используется внешнее компенсирующее устройство по задающим или возмущающим воздействиям.
Принцип инвариантности – принцип компенсации динамической и статической ошибок независимо от формы входного воздействия по каналу управления или компенсации возмущающего воздействия.
-
Расчет компенсирующих устройств по каналу возмущения
Пусть структурная схема исходной системы преобразована к виду, изображенному на рис.1.
Перенесем на вход системы точку приложения возмущения (рис. 2).
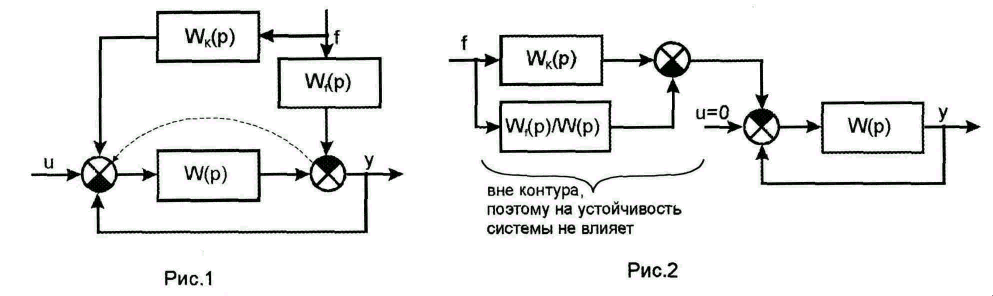
![]() .
.
Влияние на выходную функцию со стороны возмущения f будет отсутствовать, если выполняется условие абсолютной инвариантности системы к возмущающему воздействию:
![]() -
условие полной компенсации возмущения.
-
условие полной компенсации возмущения.
Внешние регуляторы используются для получения инвариантности по каналу возмущения с точностью до .
Пример. Пусть объект и регулятор ведут себя как апериодические звенья. Наибольшая постоянная времени, как правило, принадлежит объекту.
Тогда
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() .
.
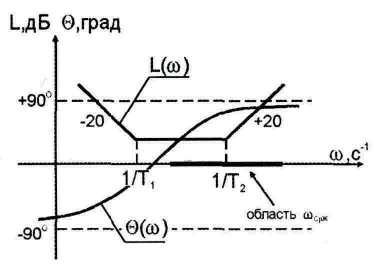
Графики на рис. 3.
1/Тp
1/Т0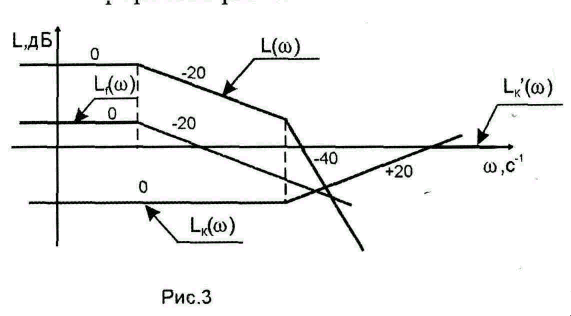
![]() в ограниченном диапазоне частот (
в ограниченном диапазоне частот (![]() на рис. 3).
на рис. 3).
Технически трудно и не всегда возможно измерить возмущение, поэтому при проектировании систем часто используют косвенные методы измерения возмущающих воздействий.
2. Расчет систем с компенсацией динамической ошибки по каналу управления
y1
y1+u-y
Для этой системы, структурная схема которой изображена на рис. 4, справедливы следующие соотношения:

![]() ;
;

=![]() – передаточная функция по сигналу
ошибки.
– передаточная функция по сигналу
ошибки.
Можем добиться условия полной компенсации ошибки, если выбрать компенсирующую цепь с параметрами:
(1) ![]() – условие абсолютной инвариантности
системы к ошибке по каналу управления.
– условие абсолютной инвариантности
системы к ошибке по каналу управления.
Передаточная
функция системы с компенсирующей цепью
![]() .
.
В
этом случае
![]() ,
,
![]() .
.
Следящие системы реализуются астатическими. Рассмотрим пример для таких систем (рис.5).

В области высоких частот дифференцирование второго порядка в компенсирующей цепи приводит к насыщению усилителей и размыканию цепи при высоком уровне помех. Поэтому осуществляется приближенная реализация, которая дает ощутимый эффект регулирования.

Астатические
системы характеризуются
добротностью
– передаточный
коэффициент k определяется при =1 и =k.
Если k=10, то ошибка в 10%, так как
![]() ,
система низкого качества (рис.6).
,
система низкого качества (рис.6).
Введем компенсирующую цепь с передаточной функцией
![]() .
Такой цепью может служить тахогенератор,
если
.
Такой цепью может служить тахогенератор,
если
вход механический. Реализация системы с малой добротностью
проста.
Пусть
![]() ,
из условия (1) получим
,
из условия (1) получим
![]() .
.
Тогда, имея систему с астатизмом 1-го порядка, получим систему с
астатизмом второго порядка (рис.7).
Всегда
Y
отстает от управляющего сигнала; введя
![]() ,
уменьшаем ошибку. Компенсирующая цепь
не влияет на устойчивость.
,
уменьшаем ошибку. Компенсирующая цепь
не влияет на устойчивость.
Как правило, компенсирующее звено должно обладать дифференцирующими свойствами и реализовываться с использованием активных элементов. Точное выполнение условия абсолютной инвариантности невозможно в виду технической нецелесообразности получения производной выше второго порядка (в контур регулирования вводится высокий уровень помех, возрастает сложность компенсирующего устройства) и инерционности реальных технических устройств. Количество апериодических звеньев в компенсирующем устройстве проектируют равным числу элементарных дифференцирующих звеньев. Постоянные времени апериодических звеньев рассчитывают по условию работы звеньев в существенной области частот, т.е.
![]() ,
,
![]() .
.