

4.3.2. Плоская система сил
В
соотношениях (4.10) - (4.12) в случае плоской
системы сил (пусть это будет плоскость
xOy)
![]() ,
а вместо соотношений (4.13) используется
соотношение (4.8).
,
а вместо соотношений (4.13) используется
соотношение (4.8).
4.4. Теорема о зависимости главного момента от центра приведения
4.4.1. Пространственная система сил
Теорема:
Главный вектор не зависит от выбора
центра приведения, а главный момент
пространственной системы сил изменяется
на момент главного вектора, приложенного
в старом центре приведения, относительно
нового центра приведения (рис. 27).![]()
Доказательство:
Приведем
систему сил
![]() к центру О, а затем к центру О1:
к центру О, а затем к центру О1:
![]() ,
(4.5)
(4.6)
,
(4.5)
(4.6)
![]() .
(4.5)
(4.6)
.
(4.5)
(4.6)
Очевидно, что
![]() .
(4.16)
.
(4.16)
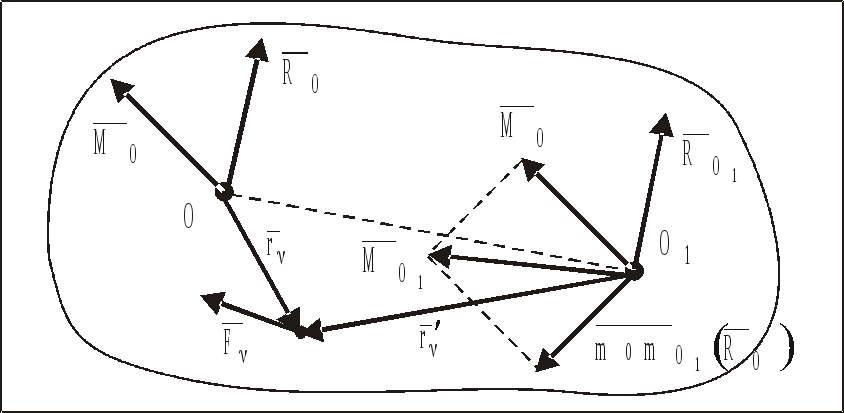
Рис. 27
Так
как
![]() ,
то формула для
,
то формула для![]() примет вид:
примет вид:
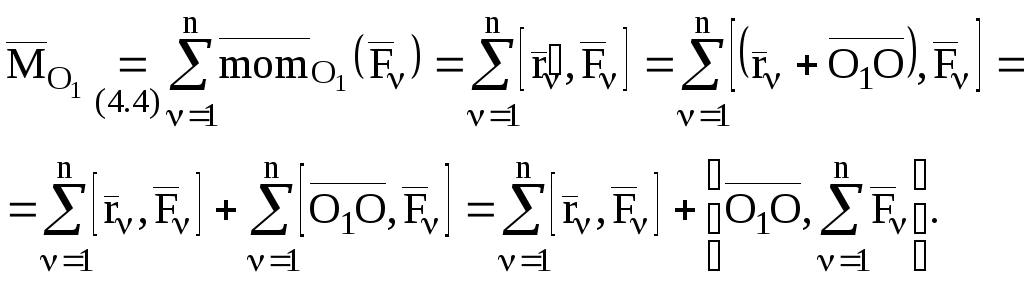
Учитывая, что на основании формул (4.3) и (4.4)
![]() ,
,
можно
записать для
![]() :
:
![]() .
(4.17)
.
(4.17)
4.4.2. Плоская система сил
Для
плоской системы сил вектор
![]() лежит в плоскости действия сил, а векторы
лежит в плоскости действия сил, а векторы![]() ,
,![]() и
и![]() перпендикулярны этой плоскости (рис.
28) при условии, что точки О и О1
лежат в плоскости действия сил.
перпендикулярны этой плоскости (рис.
28) при условии, что точки О и О1
лежат в плоскости действия сил.
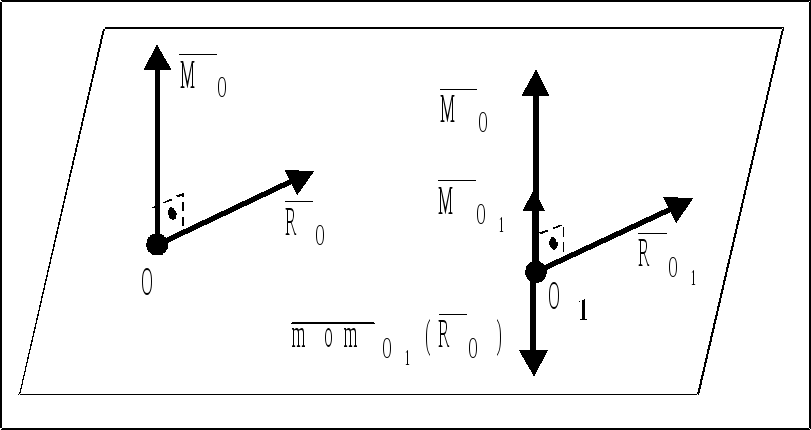
Рис. 28
Соотношение (4.17) для плоской системы сил примет вид:
![]() .
(4.18)
.
(4.18)
4.5. Инварианты статики
Определение: Инвариантами в статике называются такие параметры рассматриваемой системы сил, которые не изменяются при переносе центра приведения.
4.5.1. Пространственная система сил
Из соотношения (4.16) следует, что главный вектор системы сил является первым инвариантом статики:
![]() .
(4.19)
.
(4.19)
Скалярное произведение главного момента на главный вектор есть второй инвариант статики. Но это утверждение необходимо доказать:
 .
.
(4.17)
Второе слагаемое правой части этого выражения равно нулю (свойства смешанного произведения), следовательно:
![]() .
(4.20)
.
(4.20)
Если воспользоваться определением скалярного произведения, то для второго инварианта можно получить еще одну форму:
![]() .
.
Так
как
![]() ,
то предыдущее выражение примет вид:
,
то предыдущее выражение примет вид:
![]() .
(4.21)
.
(4.21)
Таким образом, проекция главного момента на направление главного вектора есть величина постоянная для данной системы сил и не зависит от выбора центра приведения.
4.5.2. Плоская система сил
Первый инвариант плоской системы сил – главный вектор лежит в плоскости действия сил. Второй инвариант (скалярное произведение главного момента на главный вектор) равен нулю для любой точки приведения, лежащей в плоскости действия сил, поскольку главный момент перпендикулярен плоскости действия сил и, следовательно, перпендикулярен главному вектору:
![]()
4.6. Приведение произвольной системы сил
к простейшим системам
4.6.1. Приведение системы сил к равнодействующей
![]() .
.
а)
Если при приведении системы сил к центру
О
![]() то
на основании (6.4) можно записать
то
на основании (6.4) можно записать
![]() .
(4.22)
.
(4.22)
В этом случае система сил приводится к равнодействующей, приложенной в центре приведения и совпадающей по величине и направлению с главным вектором.
б)
Если при
приведении системы сил к центру О
![]() (рис. 29), то представив
(рис. 29), то представив![]() в виде пары сил
в виде пары сил
![]() с плечом
с плечом
![]() ,
(4.23)
,
(4.23)
получим:
 .
.

Рис. 29
![]() .
(4.24)
.
(4.24)
В этом случае система сил приводится к равнодействующей, совпадающей по величине и направлению с главным вектором, а линия действия равнодействующей отстоит от линии действия главного вектора на расстояние ОО1, определяемое соотношением (4.23) (момент равнодействующей относительно центра приведения совпадает с главным моментом).