

статика / GLAVA3
.docГлава 3. Системы двух параллельных сил
3.1. Система двух параллельных и направленных в одну сторону сил
Система двух параллельных и направленных в одну сторону сил (рис. 15)
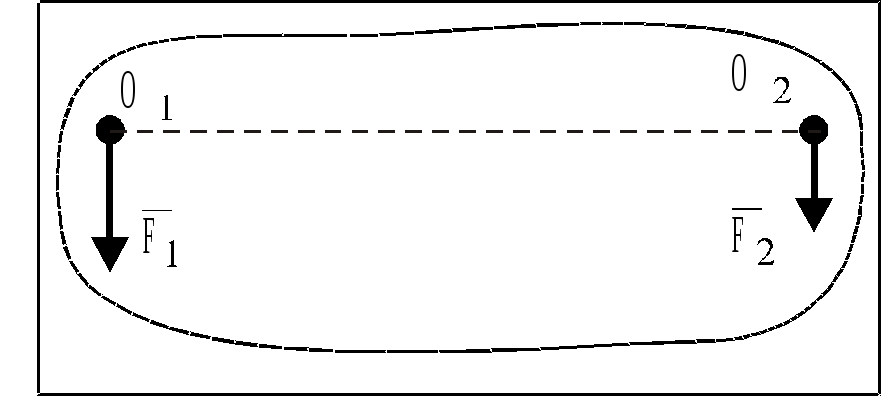
Рис. 15
может
быть сведена к сходящейся системе сил
путем добавления (аксиома 2) уравновешенной
системы сил
![]() следующим образом (рис. 16):
следующим образом (рис. 16):
 '
'

![]()
![]()
![]()
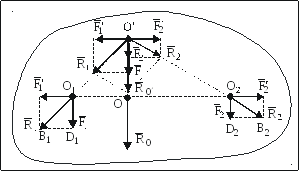
Рис. 16
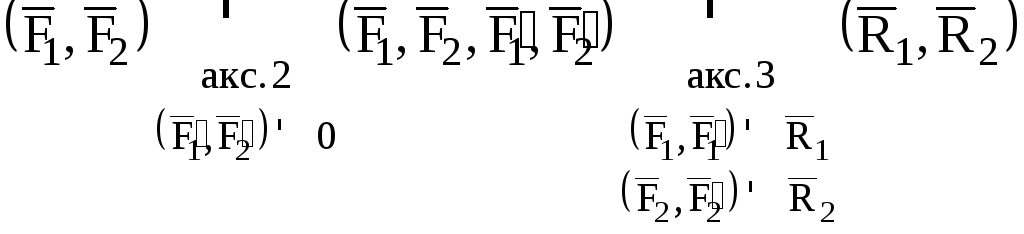
Эти же преобразования можно записать в следующем виде:

В результате
преобразования силы
![]() и
и
![]() приложены в точке О' и направлены
по одной прямой, следовательно,
приложены в точке О' и направлены
по одной прямой, следовательно,
![]() .
(3.1)
.
(3.1)
Положение
точки О определяется c
помощью пропорций, полученных из подобия
треугольников
![]() ,
,
![]() (по признаку равенства углов).
(по признаку равенства углов).
Тогда
![]()
или
![]() и
и
![]() .
.
Разделив
первое соотношение на второе и учитывая,
что
![]() ,
получим:
,
получим:
![]() .
(3.2)
.
(3.2)
Таким образом, система двух параллельных и направленных в одну сторону сил приводится к равнодействующей (рис.17), которая равна по модулю сумме модулей этих сил (3.1), параллельна этим силам, направлена в ту же сторону, а ее линия действия проходит через точку, которая делит внутренним образом расстояние между линиями действия сил на части, обратно пропорциональные модулям сил (3.2).
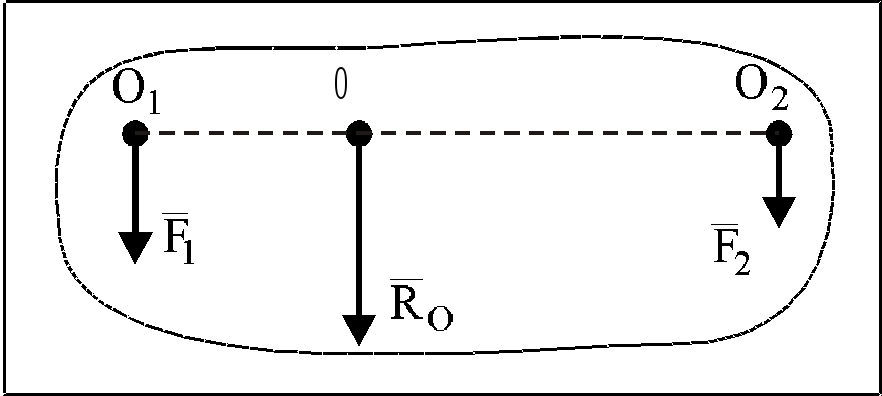
Рис. 17
Используя соотношения (3.1) и (3.2), можно решить также обратную задачу: разложить силу на две, направленные в ту же сторону, параллельные силы. Обратная задача в отличие от прямой имеет бесконечное множество решений.
3.2. Система двух параллельных, не равных
по модулю и направленных в противоположные
стороны сил
Система двух параллельных, не равных по модулю и направленных в противоположные стороны сил, приводится к равнодействующей следующим образом (рис. 18).
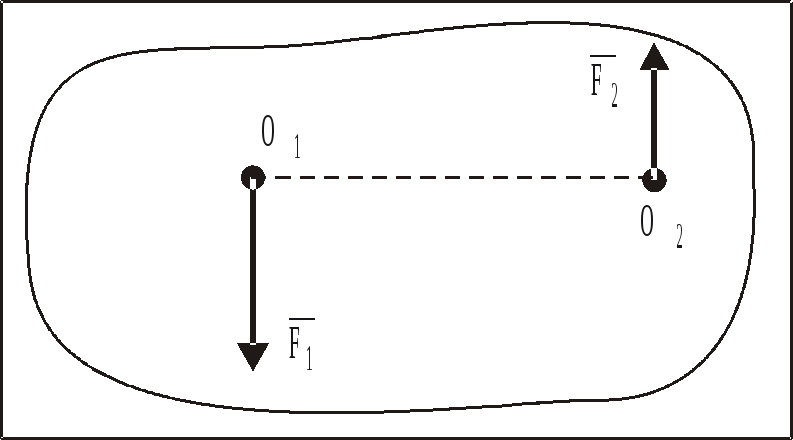
Рис. 18
Используя
предыдущий случай, разложим большую
силу
![]() на две параллельные составляющие
на две параллельные составляющие
![]() и
и
![]() :
:
![]() (3.3)
(3.3)
так
чтобы сила
![]() была приложена
в точке О2
и по величине силы
была приложена
в точке О2
и по величине силы
![]() и
и
![]() были бы равны (рис. 19):
были бы равны (рис. 19):
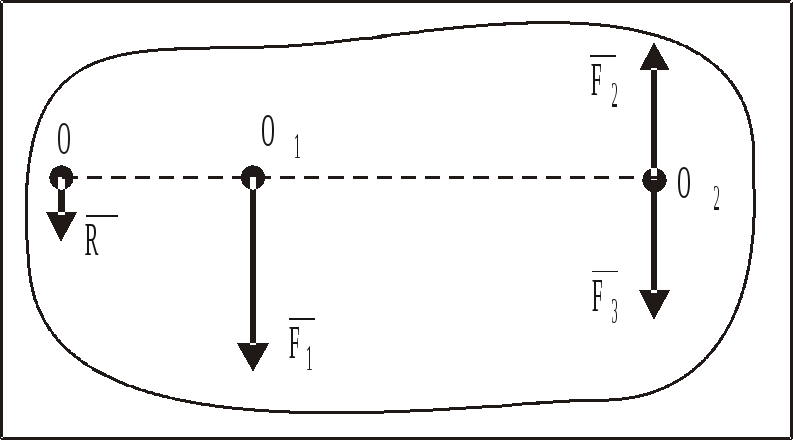
Рис. 19
На основании соотношения (3.1) можно записать
![]() ,
(3.4)
,
(3.4)
и
тогда
 .
.
Эти же преобразования можно записать в следующем виде:
![]()
Таким
образом, из (3.4) с учетом, что
![]() ,
получим:
,
получим:
![]() ,
,
![]() (3.5)
(3.5)
На основании формулы (3.2) запишем:
![]() ,
откуда
,
откуда
![]() .
(3.6)
.
(3.6)
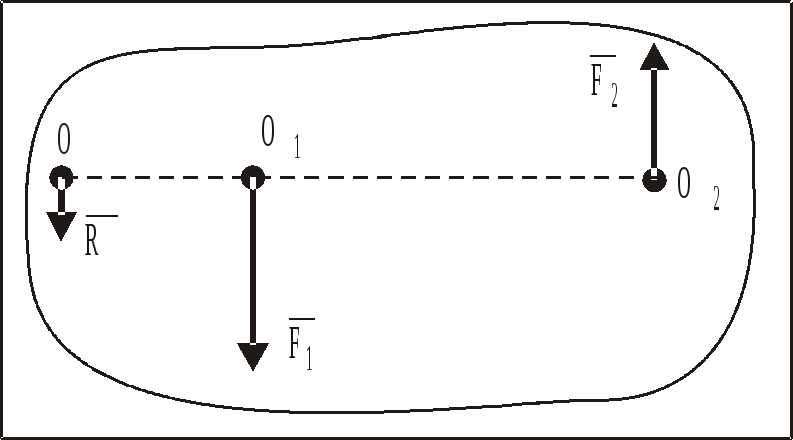
Рис. 20
Таким образом, система двух параллельных, не равных по модулю и направленных в противоположные стороны сил, приводится к равнодействующей (рис. 20), которая равна по модулю разности модулей сил (3.5), параллельна этим силам, направлена в сторону большей из них, а ее линия действия проходит через точку, которая делит внешним образом расстояние между линиями действия сил на части, обратно пропорциональные модулям сил (3.6).
Используя соотношения (3.5) и (3.6), можно решить также обратную задачу: разложить силы на две, направленные в разные стороны параллельные силы. Обратная задача в отличие от прямой имеет бесконечное множество решений.
3.3. Пара сил
3.3.1. Понятие пары сил
Определение: Парой сил называется система двух равных по величине, параллельных и направленных в противоположные стороны сил (рис.21).
Плоскость, проведенная через линии действия сил пары, образует плоскость действия пары.
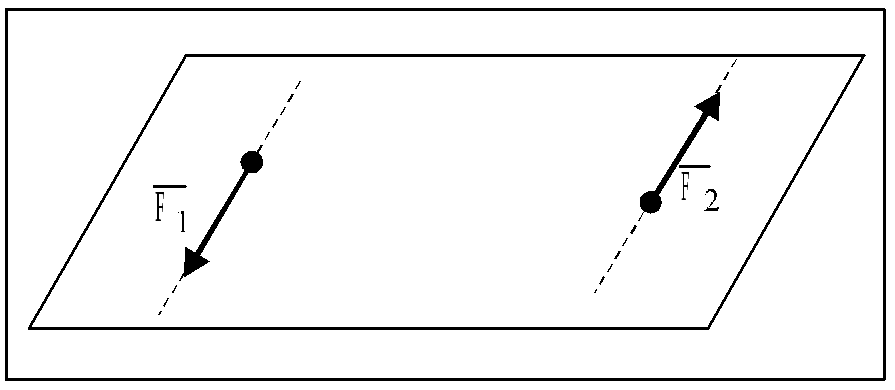
Рис. 21
Так
как для пары сил
![]() ,
то из (3.5) следует, что R=0. Однако система
сил пары не будет уравновешенной, так
как не выполняются условия аксиомы 1.
,
то из (3.5) следует, что R=0. Однако система
сил пары не будет уравновешенной, так
как не выполняются условия аксиомы 1.
Изучение действия пары сил не может быть сведено к изучению действия одной силы. Поэтому пара является новым самостоятельным элементом статики, таким же основополагающим, как понятие "сила".
3.3.2. Момент пары
Определим момент пары как сумму моментов сил пары относительно произвольной точки О (рис. 22):
![]()
![]() .
(3.7)
.
(3.7)
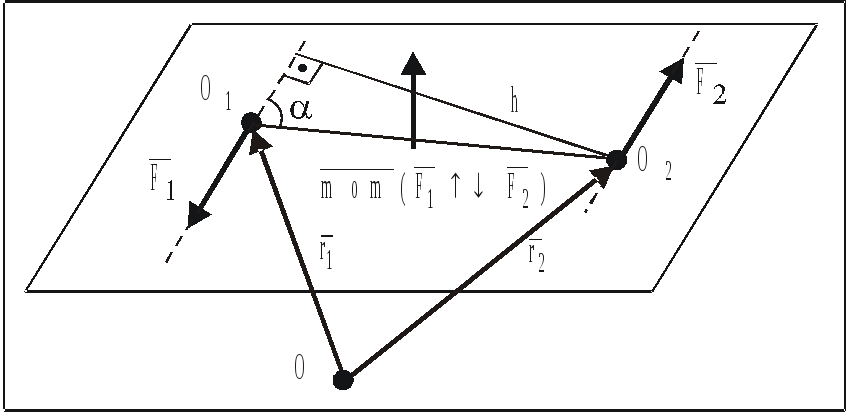
Рис. 22
На основании соотношения (3.7) можно сделать вывод, что сумма моментов сил пары относительно произвольной точки О, не зависит от положения этой точки.
Определение: Моментом пары сил называется вектор равный по модулю произведению модуля одной из сил пары на кратчайшее расстояние между линиями действия сил пары, называемое плечом, направленный перпендикулярно плоскости пары в ту сторону откуда пара видна стремящейся осуществить поворот плоскости ее действия против хода часовой стрелки (рис. 22).
![]() .
(3.8)
.
(3.8)
Используя соотношение (3.7), можно записать следующие формулы:
![]() .
(3.9)
.
(3.9)
Определение: Эквивалентными парами сил называются такие пары, при замене одной из которых на другую не изменится состояние свободной НМС.
Эквивалентные пары имеют одинаковые по модулю и направлению моменты.
3.4. Теоремы об эквивалентности пар
Теорема 1: Действие пары сил на НМС не изменится, если пару перенести и повернуть в плоскости ее действия.
Доказательство:
Пусть имеется пара сил
![]() с плечом h.
с плечом h.
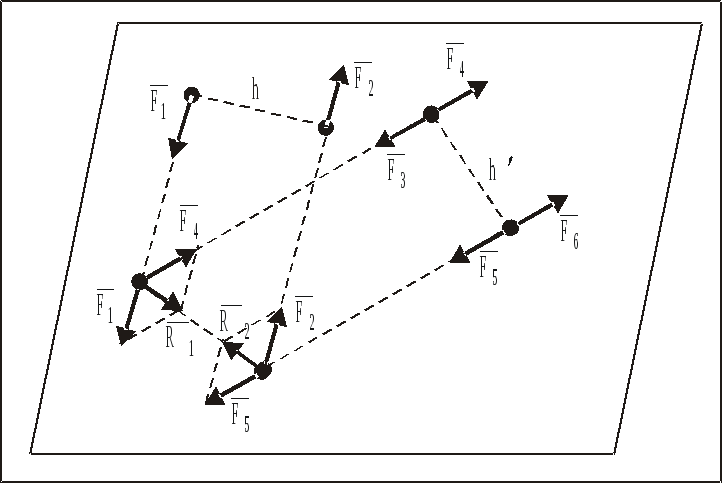
Рис. 23
Добавим
уравновешенную систему четырех сил
![]() (рис. 23), численно равных модулям сил
пары, направленных так, чтобы линии
действия сил
(рис. 23), численно равных модулям сил
пары, направленных так, чтобы линии
действия сил
![]() ,
,![]() и
и
![]() были параллельны и расстояние между
этими линиями действия сил равнялось
h
(рис. 23).
были параллельны и расстояние между
этими линиями действия сил равнялось
h
(рис. 23).
Учтя,
что параллелограммы, построенные на
силах
![]() и
и
![]() ,
,
![]() и
и
![]() будут ромбами и, следовательно,
будут ромбами и, следовательно,
![]() ,
получим:
,
получим:
что и требовалось доказать.
Теорема 2: Действие пары сил на НМС не изменится, если пару перенести в плоскость, параллельную плоскости пары.
Доказательство теоремы 2 аналогично доказательству теоремы 1 с тем различием, что добавляется уравновешенная система четырех сил в плоскости, параллельной плоскости пары.
На основании первых двух теорем можно сделать вывод:
Момент пары сил – вектор свободный.
Теорема 3: Действие пары сил на НМС не изменится, если изменить модуль силы пары и ее плечо, сохранив неизменным момент пары (без доказательства).
3.5. Приведение систем пар сил
к равнодействующей паре
3.5.1. Cложение пар сил,
лежащих в пересекающихся плоскостях
Пусть имеется система лежащих в пересекающихся плоскостях n пар, с моментами:
![]() ,
,
![]() .
.
Моменты пар являются свободными векторами, следовательно, их можно переносить параллельно самим себе в одну точку приложения и сложить геометрически:
![]() ,
(3.10)
,
(3.10)
где
![]() – момент равнодействующей пары.
– момент равнодействующей пары.
Справедливость формулы (3.10) можно доказать, используя три теоремы об эквивалентности пар, перенося пары в их плоскостях в параллельные плоскости и взяв общим плечом пар плечо на прямой, по которой пересекаются плоскости пар, сохраняя момент пары.
3.5.2. Сложение пар сил,
лежащих в параллельных плоскостях
Так как моменты пар сил, лежащих в параллельных плоскостях перпендикулярны этим плоскостям, т. е. параллельны друг другу и являются векторами свободными, то момент результирующей пары направлен перпендикулярно плоскостям пар и его величина определяется алгебраическим сложением величин моментов этих пар сил:
![]() .
(3.11)
.
(3.11)
3.6. Условия равновесия систем пар сил
Условия равновесия системы пар сил, лежащих в пересекающихся плоскостях, может быть получена из (3.10):
![]() .
(3.12)
.
(3.12)
Условие равновесия систем пар, лежащих в параллельных плоскостях имеет вид:
![]() .
(3.13)
.
(3.13)