

Аналитическая механика. Классификация связей. Примеры. Возможные перемещения.
Связь – это соотношение связывающихся между собой координаты и скорости точек системы представляющихся в виде равенств или неравенств.
Классификация:
Геометрические – накладывает ограничения только на координаты точек системы (скорости не входят)
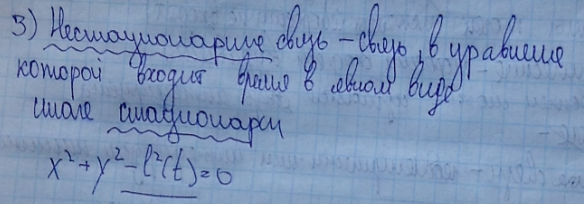
Кинематические – скорости входят в уравнения. Если от скоростей можно избавиться, то связь интегрируемая.
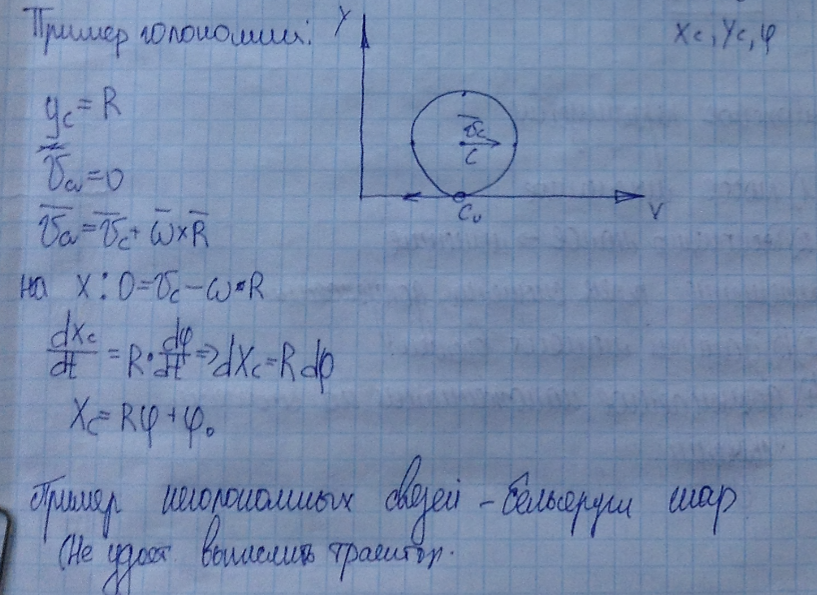
Голономные связи – геометрические и интегрируемые дифференциальные связи.
Связь называется удерживающие (налагаемые или ограничения сохраняются при любом положении системы) и неудерживающие, которые этим свойством не обладают ( от таких связей, как говорят, система может “освобождаться”
Возможное перемещение
Это
Любое мысленное
Бесконечно малое
Перемещение точек системы, допускаемых
В данный момент времени
Наложенными на систему связями.
Действительное перемещение – зависит от сил, времени, связей, начальных условий.
Возможное перемещение – зависит только от связей.
Для стационарных связей действительное перемещение это одно из возможных.
Идеальные связи. Принцип возможных перемещений.
Идеальными называются связи, для которых сумма элементарных работ всех их реакций на любом возможном перемещении равна 0.

Принцип возможных перемещений.
Для
равновесия механической системы с
идеальными стационарными связями,
необходимо и достаточно, чтобы сумма
элементарных работ всех активных сил
на любом возможном перемещении равнялась
0. При этом для достаточности начальная
скорость должна равняться нулю.
Необходимое равновесие => Достаточное
Достаточное
 =>равновесие.
=>равновесие.
Обобщенные координаты. Число степеней свободы системы. Обобщенные силы, способы их вычисления. Условия равновесия системы с голономными связями, выраженные в терминах обобщенных сил.
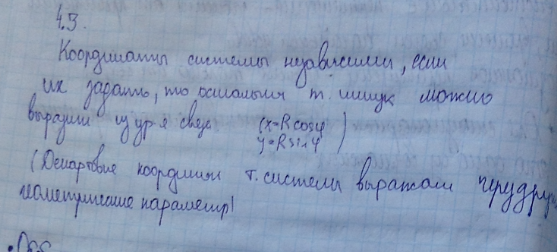
Обобщенные координаты – независимый параметр, который полностью определяет положение системы и через который могут быть выражены все декартовые координаты точек системы.
Число степеней свободы определяется количеством обобщенных координат
Или так:
Число независимых между собой скалярных величин, однозначно определяющих положение механической системы в пространстве, называется числом степеней свободы.
Обобщенными координатами механической системы называются любые независимые между собой геометрические величины, однозначно определяющие положение системы в пространстве.
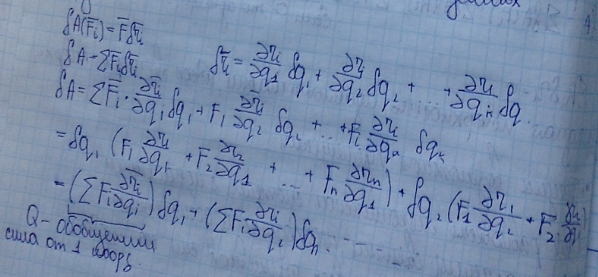
Qi = δAj/δqj или δAj = Qi⋅ δqj.
Обобщенная сила – это такая сила, которая совершает на возможном перемещении по своей обобщенной координате такую же работу, как и все силы, приложенные к системе, на соответствующем перемещении точек их приложения.
Для нахождения обобщенной силы даем возможное перемещение по своей обобщенной координате, оставляя остальные координаты неизменными. Затем находим работу всех сил, приложенных к системе и делим на возможное перемещение.
Принцип возможных перемещений в терминах обобщенных сил.
Поскольку
при равновесии сумма элементарных
работы на любом возможном перемещении
(бА= бqj,
которые не зависит друг
от друга, то для этого должно выполняться:
Q1=0;
Q2=0;
QK=0
бqj,
которые не зависит друг
от друга, то для этого должно выполняться:
Q1=0;
Q2=0;
QK=0