

4.2 Преобразователи с широтно-импульсным
регулированием напряжения
Использование модуляции для регулирования напряжения постоянного тока, подаваемого на нагрузку, является распространенным приемом. Отметим три способа модуляции:
– широтно-импульсная модуляция ШИМ, при которой период модуляции постоянен, а переменным является время приложения постоянного по значению напряжения к нагрузке. Обозначим его как время работы tраб. Оно определяется средними значениями напряжения и тока на нагрузке;
– частотно-импульсная модуляция ЧИМ, при которой время приложения постоянного по значению напряжения к нагрузке неизменно в течение периода модуляции, а сам период переменен, т. е. частота модуляции определяется средними значениями напряжения и тока на нагрузке;
– широтно-частотная модуляция ШЧМ, при которой и период модуляции, и время приложения постоянного по значению напряжения к нагрузке переменны и определяется средними значениями напряжения и тока на нагрузке.
В электроприводе наибольшее распространение получила широтно-импульсная модуляция. Эпюры напряжения и тока при однополярной ШИМ приведены на рис. 4.10, где tраб – длительность импульса напряжения, приложенного к нагрузке; tпаузы – время паузы; tмод – период модуляции.
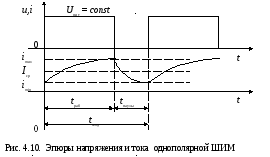
Соотношение время работы – период модуляции оценивается продолжительностью включения γ = tраб / tмод. Среднее напряжение за период модуляции определяется выражением
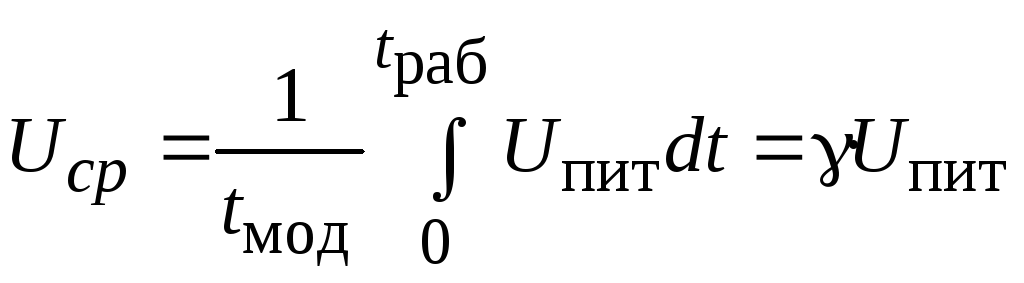 .
(4.14)
.
(4.14)
Такое ШИМ-напряжение достаточно рационально реализуется полупроводниковыми преобразователями, которые в большинстве случаев для нужд полиграфического оборудования выполняются на транзисторах. Пример такого преобразователя представлен на рис. 4.11.
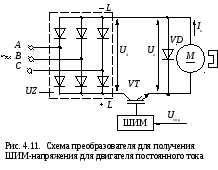
Напряжение питания Uпит = Ud постоянное по значению получается за счет применения неуправляемого выпрямителя (однофазного при малых мощностях или трехфазного при больших мощностях нагрузки). Транзисторным ключом VT обмотка якоря двигателя с периодом модуляции подсоединяется к нерегулируемому напряжению Ud. В рабочую часть периода tраб двигатель потребляет энергию от источника питания, расходуя ее на совершение полезной работы и на накопление кинетической и электромагнитной энергии. Во время паузы транзистор VT выключен, и ток по цепи якоря протекает за счет накопленной энергии через диод VD под действие ЭДС двигателя. Период модуляции задается системой управления ШИМ в соответствии с напряжением управления Uупр, определяющим необходимые средние значения напряжения и тока, а следовательно и скорость электропривода. Зависимость скорости ω при ШИМ-регулировании можно записать в виде
![]() ,
(4.15)
,
(4.15)
где ω0 – скорость идеального холостого хода; Iср – среднее значение тока якоря; Iмод = Ud /Rя.
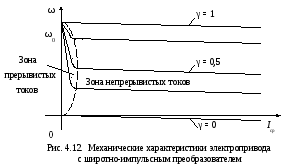
Анализ работы схемы показывает, что период модуляции не зависит от частоты напряжения на входе неуправляемого выпрямителя, а определяется только динамическими свойствами транзистора. В силу высококачественных параметров современных транзисторов частота модуляции fмод = 1/tмод составляет десятки килогерц. Внутреннее сопротивление неуправляемого выпрямителя мало и напряжение Udне зависит от нагрузки, что определяет высокую жесткость механических характеристик электропривода, которая зависит только от сопротивления якоря двигателяRя. Этому способствует и то обстоятельство, что система возбуждения двигателя, особенно для небольших мощностей двигателя, выполняется постоянными магнитами с высокими уровнями магнитной энергии. Общий вид механических характеристик при ШИМ регулировании приведен на рис. 4.12.
Традиционное выражение механической характеристики на основе выражения (15) будет иметь следующий вид:
![]() .
(4.16)
.
(4.16)
Импульсное регулирование напряжения сопровождается пульсациями тока якоря, а значит момента и скорости двигателя. Это негативная сторона такого регулирования. Значение пульсаций тока выразим как
![]() ,
(4.17)
,
(4.17)
где Тя– электромагнитная постоянная времени якорной цепи;
K– коэффициент.
Для нереверсивных преобразователей коэффициент K= 1. Для реверсивных преобразователей коэффициентKможет принимать значения 1 или 0,5 в зависимости от способа коммутации его силовых ключей. Выражение (4.16) показывает, что уменьшение пульсаций можно добиться увеличением электромагнитной постоянной времени якорной цепи и частотой модуляции. Последняя причина весьма выгодна, поскольку улучшаются динамические свойства электропривода. Регулирование может приводить к снижению значения среднего тока Iср, что вызывает возрастание его пульсаций, приводящей к снижению тока во время паузы к нулю. Наступает режим прерывистых
токов. Граничное значение тока можно вычислить по выражению
![]() .
(4.18)
.
(4.18)
Самая большая протяженность режима прерывистых токов возникает при γ = 0,5, при γ = 1 и γ = 0 наблюдается только режим непрерывного тока. В зоне прерывистых токов модуль жесткости механических характеристик уменьшается. Здесь они приблизительно описываются уравнением вида
![]() .
(4.19)
.
(4.19)
Это выражение помогает понять, почему характеристики в зоне прерывистых токов выходят из точки идеального холостого хода. При токе Iср→ 0 изменение γ не приводит к изменению ω0.
Избежать зоны прерывистых токов позволит применение реверсивных преобразователей ШИМ-напряжения. Это дает линейность механических характеристик во всем диапазоне изменения нагрузки двигателя. Схема реверсивного преобразователя приведена на рис. 4.13. Преобразователь собран по мостовой схеме, в каждом плече которой имеется IGB-транзистор и дроссельL.
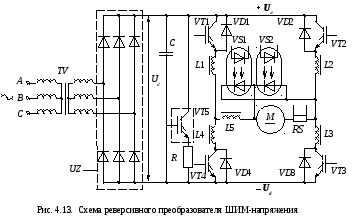
В диагональ моста включена обмотка якоря двигателя, дроссель L5 и шунтRS. Двухполярное ШИМ-напряжение на обмотке якоря формируется симметричным режимом работы транзисторовVT1…VT4, которые в течение периода модуляции переключаются попарно:VT1…VT3 обеспечиваютtраб.1(+ud), аVT2…VT4 –tраб.2( –ud), гдеtраб.1 >tраб.2, для одного направления вращения вала двигателя, иVT1…VT4 обеспечиваютtраб.1(+ud), аVT2…VT3 –tраб.2( –ud), гдеtраб.1 <tраб.2, для обратного направления вращения. Среднее напряжение на нагрузке определяется выражением
![]() .
(4.20)
.
(4.20)
Оно равно нулю при γ = 0,5, и меняет свой знак при γ < 0,5. Дроссели L1, L4 иL2, L3 ограничивают сквозной ток, который может возникнуть в момент переключения транзисторовVT1,VT4 иVT2,VT3, изменяющих полярность на обмотке якоря в концеtраб.1и аналогично – в концеtраб.2. Симметричный режим работы ключей повышает уровень пульсаций тока в нагрузке (17), поскольку скважность модуляции при этом может составить только γ = 0,5. Однако, наличие дросселяL5 уменьшает это значение. ШунтRSв цепи обмотки якоря предназначен для организации обратной связи по току и для измерения этого тока.
Такого построения преобразователь имеет возможность сформировать на нагрузке два вида напряжения: двухполярное (рис. 4.14, а) и однополярное (рис. 4.14,б).

Однополярное ШИМ-напряжение формируется работой только транзисторов VT1,VT3 для одного направления вращения вала двигателя или толькоVT2,VT4 – для обратного. Скважность модуляции при этом может составить γ = 1, тогда согласно (4.17) пульсации тока вдвое меньше, чем в предыдущем случае. Но и здесь дроссельL5 исполнит свою роль и уменьшит пульсации тока в нагрузке.
Систему управления
ключами преобразователя, реализующую
ШИМ, с точки зрения технической реализации
целесообразно основывать на сравнении
пилообразного опорного напряжения
Uопс напряжением управления
Uупр.
Опорное напряжение задает частоту
модуляции, а напряжение управления
задает скважность модуляции, которая
определяет средние значения напряжения
и тока в нагрузке. Опорное напряжение
вырабатывается генератором пилообразного
напряжения, построенного по любому
принципу. Однако на практике в их схемных
решениях используется линейная часть
кривой заряда конденсатора, имеющей
экспоненциальную зависимость. В момент
равенства нарастающего пилообразного
напряжения и напряжения управления
схема управления вырабатывает импульсы,
переключающие соответствующие транзисторы
преобразователя. Линеаризируя передаточную
функцию преобразователя, можно считать
его как звено чистого запаздывание –![]() .
Время чистого запаздывания принимают
равным периоду модуляции τ =Тмод.
Как указывалось ранее, частота модуляции
в преобразователях велика, то τ мало и
экспоненциальную зависимость можно
заменить линейной. Тогда импульсный
преобразователь модно представить
апериодическим звеном первого порядка
с малой постоянной времени –
.
Время чистого запаздывания принимают
равным периоду модуляции τ =Тмод.
Как указывалось ранее, частота модуляции
в преобразователях велика, то τ мало и
экспоненциальную зависимость можно
заменить линейной. Тогда импульсный
преобразователь модно представить
апериодическим звеном первого порядка
с малой постоянной времени –![]() .
Если система управления выполняет
модуляцию с очень высокой частотой, то
постоянной времени запаздывания
преобразователя можно пренебречь, а
его считать безинерционным звеном с
передаточной функцией
.
Если система управления выполняет
модуляцию с очень высокой частотой, то
постоянной времени запаздывания
преобразователя можно пренебречь, а
его считать безинерционным звеном с
передаточной функцией![]() .
.
Регулируемые электроприводы, приводящие в движение производственные механизмы, могут работать как в двигательном режиме, так и переходить в тормозные (генераторные) режимы. В этих режимах запасенная механизмом энергия рекуперируется в источник питания приводного двигателя, где она либо накапливается в его емкостных элементах, увеличивая на них напряжение выше допустимого значения, либо должна рассеиваться на его активных элементах. В рассматриваемой схеме, рис. 4.13, ток рекуперации от двигателя М, перешедшего в генераторный режим, через диоды VD1,VD3 или через диодыVD2,VD4 в зависимости от направления его вращения аккумулирует возвращаемую энергию в конденсатореС, повышая на ней напряжение выше значения, выпрямленного мостомUZ. Для предотвращения воздействия этого перенапряжения на вентили выпрямительного моста и на силовые транзисторные ключи VT1,VT3,VT2,VT4 в схеме преобразователя предусматривается управляемая цепь снятия этого перенапряжения, состоящая из транзистораVT5 и резистораR. При появлении перенапряжения схема, контролирующая этот процесс, подает импульс управления на транзисторVТ5, и возвращаемая энергия рассеивается сопротивлениемR, что приводит к снижению напряжения на конденсатореСдо уровня выпрямленного значения. Такой процесс в работе электропривода наблюдается и при снижении скорости за счет использования регулируемого ШИМ-напря-жения. Кроме такого ограничения режимов работы электропривода в нем организуется аварийное торможение, которое может использоваться в частности при коротких замыканиях, при перегрузках, понижении или обрыве фазы питающего напряжения, при несоответствии фактической скорости якоря двигателя заданной и т. п. Аварийное торможение является динамическим. В большинстве случаев динамическим сопротивлением является измерительный шунт, используемый для снятия информации о токе в обмотке якоря двигателя. Аварийное торможение включается схемой, выявляющей аварийные режимы, а реализуется, например, в рассматриваемом электроприводе оптронным ключомVS1 либоVS2 в зависимости от направления вращения электродвигателя (от полярности его ЭДС). Включившийся оптронный ключ замыкает якорную обмотку двигателя на сопротивление шунтаRS, образуя тем самым динамическое торможение. В ней в силу малого сопротивления шунта обеспечивается большое значение тормозного тока, тормозного момента и весьма быстрое (в течение долей секунды) снижение скорости до нуля. Механическая характеристика при таком динамическом торможении имеет высокий модуль жесткости.