

Асинхронные машины
.pdfРис. 3-66. Схема пуска короткозамкнутого двигателя при переключении обмотки статора со звезды на треугольник.
Во время пуска она соединяется звездой, а по окончании разбега переключается на
треугольник. Следовательно, напряжение, приходящееся на фазу при пуске, будет в 
 3 раз меньше, чем при работе.
3 раз меньше, чем при работе.
При этом (если считать параметры двигателя постоянными) начальный пусковой фазный ток
уменьшается также в  3 раз, а линейный ток — в 3 раза (в действительности вследствие уменьшения при больших токах x1 и x2, вызванного насыщением коронок зубцов полями рассеяния, уменьшение тока получается больше чем в 3 раза).
3 раз, а линейный ток — в 3 раза (в действительности вследствие уменьшения при больших токах x1 и x2, вызванного насыщением коронок зубцов полями рассеяния, уменьшение тока получается больше чем в 3 раза).
При понижении напряжения, приложенного к обмотке статора, заметно уменьшается начальный пусковой момент, пропорциональный квадрату первичного напряжения. Поэтому пуск при пониженном напряжении применяется только в тех случаях, где не требуется большой начальный момент (например, для электропривода к вентилятору).
Многие мощные сети, имеющиеся на заводах и электрических станциях Советского Союза, допускают непосредственное включение короткозамкнутых двигателей больших мощностей (на сотни киловатт).
Благодаря сравнительно небольшой стоимости, простоте конструкции, большой надежности в работе и удобству в обслуживании короткозамкнутые двигатели получили значительно большее распространение, чем двигатели с контактными кольцами.
Короткозамкнутые двигатели мощностью примерно до 100—125 кВт обычно выполняются со скошенными пазами ротора или статора (приблизительно на пазовое деление статора). При этом уменьшаются «паразитные моменты», действующие на ротор и статор машины. Они создаются высшими гармониками полей статора и ротора, в том числе гармониками полей, обусловленными неравномерностью воздушного зазора из-за наличия пазов. При неправильно выбранном числе пазов ротора «паразитные моменты» могут вызвать заметное ослабление пускового момента и шум как при разбеге двигателя, так и при его работе.
3-20. Регулирование скорости вращения
Асинхронные двигатели обычно применяются для электроприводов, которые работают с постоянной частотой вращения. Но иногда они применяются для регулируемых электроприводов. Рассмотрим возможные способы регулирования частоты вращения.
1. На практике иногда для регулирования частоты вращения асинхронного двигателя используется реостат в цепи ротора, имеющего обмотку, присоединенную к контактным кольцам.
Увеличение активного сопротивления цепи ротора приводит к увеличению скольжения и, следовательно, к уменьшению частоты вращения двигателя, что видно из кривых M = f(s) при
различных ( r2 rд ), представленных на рис. 3-60. Здесь при M ст const (соответствует работе электропривода с подъемным краном) точки пересечения кривой M ст  f (s) с указанными кривыми
f (s) с указанными кривыми
определяют скольжения при различных значениях ( r2 rд ). Регулирование здесь возможно в широких пределах, причем плавность регулирования, очевидно, зависит от числа ступеней реостата.
Указанный способ регулирования неэкономичен, так как он связан с непроизводительной затратой энергии в реостате. Действительно, согласно (3-69) получаем:
Pэ1 m1 I 22 (r2 rд ) sPэм sω1M .
Отсюда видно, что увеличение скольжения s при М = const приводит к увеличению электрических потерь в роторной цепи. Если, например, s увеличивается при М = const вследствие
введения в роторную цепь сопротивления rд от 0,02 до 0,5, что соответствует уменьшению частоты вращения приблизительно вдвое, то почти половина мощности Рэм непроизводительно теряется в реостате.
При регулировании частоты вращения двигателя при помощи реостата в цепи ротора следует иметь в виду, что его механическая характеристика (рис. 3-67) может получиться резко падающей, недопустимой, например, для электропривода к токарному станку.
Рис. 3-67. Механические характеристики n2 = f (M) двигателя с контактными кольцами при сопротивлении rд = 0 и при rд >0.
Для целей регулирования не следует применять пусковые реостаты, так как они предназначаются для кратковременной нагрузки. Регулировочные реостаты должны иметь большие размеры, чтобы получилась достаточная поверхность охлаждения для рассеяния тепла, образующегося в реостате.
2. Частоту вращения асинхронного двигателя можно регулировать также путем изменения напряжения U1 на зажимах статора. Однако такой способ регулирования при малом сопротивлении роторной цепи позволяет изменять частоту вращения лишь в небольших пределах, что следует из рис. 3-68, где сплошные кривые представляют собой зависимости M = f(s)при различных напряжениях U1 и при rд = 0.
Рис. 3-68. Регулирование частоты вращения путем изменения напряжения U1.
Можно расширить пределы регулирования путем изменения U1, включив в роторную цепь добавочное сопротивление rд (пунктирные кривые на рис. 3-68).
Изменение напряжения U1 производится при помощи регулировочных трансформаторов, реактивных катушек с выдвижным сердечником, переменных активных сопротивлений, включенных
вцепь статора, а также при помощи магнитных усилителей.
3.В относительно редких случаях регулирование частоты вращения осуществляется путем изменения частоты f1, тока, подводимого к двигателю. При этом изменяется частота вращения поля
n60 f1
1p , а следовательно, и ротора. Такой способ регулирования требует наличия отдельного генератора переменного тока с регулируемым первичным двигателем.
4.На практике применяется также способ ступенчатого изменения частоты вращения путем изменения числа пар полюсов обмотки статора. Соответствующее переключение обмотки производится сравнительно просто, если нужно увеличить или уменьшить число пар полюсов вдвое. В этом случае каждая фаза обмотки статора делится на две одинаковые части, которые можно включать последовательно или параллельно.
На рис. 3-69 показана принципиальная схема такой обмотки, из которой видно, что при последовательном соединении обеих половин фазы получается число полюсов, в 2 раза большее, чем при параллельном.
Рис. 3-69. Изменение числа пар полюсов обмотки статора в отношении 2 : 1.
При обмотке статора, переключаемой на различные числа пар полюсов, как правило, применяется короткозамкнутый ротор с беличьей клеткой. Если ротор выполняется с контактными кольцами, то его обмотка также должна переключаться на те же числа пар полюсов, что требует устройства большого количества контактных колец и удорожает двигатель.

Для получения большего числа ступеней скорости на статоре помещают обычно две обмотки, причем одна или каждая из них делается переключаемой на числа пар полюсов в отношении 2 : 1. В этом случае можно получить три или четыре ступени скорости, например:
3000 : 1500 : 1000
или
3000 : 1 500 : 1 000 : 500 об/мин.
Асинхронные двигатели с несколькими ступенями частоты вращения называются многоскоростными. Они применяются в электроприводах к вентиляторам и металлорежущим станкам, где позволяют упростить «коробку скоростей» или совсем от нее освободиться. Достоинством многоскоростного двигателя при применении его, например, для токарного станка является то, что при изменении момента нагрузки он работает на каждой ступени частоты вращения при незначительном ее изменении, как и обычный асинхронный двигатель.
Сказанное подтверждают механические характеристики n2 = f (M) многоскоростного двигателя, приведенные на рис. 3-70.
Рис. 3-70. Механические характеристики n2 = f (M) многоскоростного двигателя для двух ступеней скорости.
К недостаткам многоскоростных двигателей нужно отнести их увеличенные размеры по сравнению с нормальными двигателями и вследствие этого более высокую стоимость.
Другие способы регулирования частоты вращения асинхронного двигателя здесь не рассматриваются, так как они редко применяются на практике.
3-21. Работа трехфазного двигателя при неноминальных условиях
Условия работы двигателя могут отличаться от номинальных, т. е. от тех условий, для которых он предназначен.
На практике напряжение на его зажимах часто отличается от номинального: U1 U1н. Могут быть случаи, когда f1 f1н. Иногда к двигателю подводятся несимметричные напряжения, если, например, нагрузка сети, к которой он приключен, распределена по фазам неравномерно. Напряжения на зажимах двигателя могут быть также несинусоидальными, если большую часть нагрузки сети составляют нелинейные сопротивления, например, выпрямители. Поэтому исследование работы двигателя при указанных неноминальных условиях имеет важное практическое значение.
Мы здесь рассмотрим также работу двигателя при неравных сопротивлениях фаз его роторной обмотки, что может быть вызвано ухудшением переходных контактов между кольцами и щетками или дефектами, допущенными при изготовлении короткозамкнутой обмотки ротора

(например, плохие контакты или разрывы между стержнями и короткозамыкающими кольцами, пустоты в стержнях при заливке пазов алюминием).
3-21.1. Работа при U1 U1н
Отклонение напряжения U1 от номинального U1н на ±5% считается допустимым. При этом двигатель обычно может нести номинальную нагрузку на валу. При больших отклонениях напряжения нагрузка на валу двигателя, как правило, должна быть снижена.
Работа двигателя при U1 U1н может быть исследована путем сопоставления его рабочих характеристик при U1 и при U1н. Прежде чем переходить к такому сопоставлению, рассмотрим с качественной стороны, как изменятся характеристики двигателя при U1 > U1н и при U1 < U1н.
Повышение напряжения сверх номинального сравнительно редкое явление на практике, но в отдельных случаях оно может иметь место, например, при неисправностях регулятора напряжения генератора. При этом в машине должен увеличиться магнитный поток Ф, создающий э.д.с. E1, почти полностью уравновешивающую приложенное напряжение U1. Увеличение потока вызовет увеличение намагничивающего тока, которое может быть значительным из-за чрезмерного насыщения стальных участков магнитной цепи машины. В результате получим ухудшение cosθ1 и увеличение тока статора. Поэтому при U1 > U1н возрастут не только потери в стали, но и электрические потери в обмотке статора, что может увеличить ее нагрев сверх допустимого.
Если U1 < U1н, то вследствие уменьшения магнитного потока уменьшится намагничивающий ток, но возрастут активные составляющие токов ротора и статора В результате при номинальной нагрузке на валу токи ротора и статора будут больше номинальных. При этом усиливаются поля рассеяния, что повлечет за собой увеличение реактивной составляющей тока статора. Таким образом, и здесь мы будем иметь при номинальной нагрузке на валу ухудшение cosθ1 и увеличение токов статора и ротора сверх допустимого. Следует также иметь в виду, что при U1 <U1н может заметно снизиться максимальный момент двигателя Мм, пропорциональный квадрату напряжения (§
3-13,в).
При более подробном исследовании, когда нужно дать количественную оценку изменениям I1 c cosθ1, η, s при отклонении U1 от U1н, следует обратиться, как указывалось, к сопоставлению рабочих характеристик при U1 и при U1н.
Рассмотрим характеристики при U1 <U1н. Они могут быть построены по круговой диаграмме
или расчетным путем (§ 3-18). При этом параметры r1, х1, r2 и x2 остаются без изменения, а для определения тока холостого хода нужно произвести опыт холостого хода при U1 или выполнить расчет магнитной цепи и потерь в стали при E1 0,97U1.
На рис. 3-71 представлены рабочие характеристики двигателя на 10 кВт при номинальном фазном напряжении U1н = 220 В (сплошные кривые) и при фазном напряжении U1 = 127 В (пунктирные кривые). По оси ординат здесь отложены фазные токи.
Рис. 3-71. Рабочие характеристики двигателя при U1н = 220 В (сплошные кривые) и при U1 = 127 В (пунктирные кривые).
Из сопоставления характеристик мы видим, что при малых нагрузках выгодно работать при пониженном напряжении. Этим иногда пользуются на практике для улучшения соsθ1 и η двигателя: если его номинальное фазное напряжение равно напряжению сети, то при малых нагрузках [примерно при Р2 < (0,40  0,45)Р2н] его обмотку статора переключают с треугольника на звезду (для такого случая построены кривые на рис. 3-71).
0,45)Р2н] его обмотку статора переключают с треугольника на звезду (для такого случая построены кривые на рис. 3-71).
3-21.2. Работа при f1 f1н
В большинстве случаев частота сети достаточно точно поддерживается равной стандартной частоте 50 Гц. Лишь иногда, обычно в аварийных случаях, могут быть заметные отклонения fi от f1н. Если они не превышают примерно ±5%, то работа двигателя мало ухудшается; поэтому такие отклонения обычно считаются допустимыми.
При больших отклонениях fi от fiн приходится изменять напряжение на зажимах двигателя: например при регулировании его частоты вращения путем изменения частоты f1. Довольно часто при этом напряжение изменяют пропорционально частоте, чтобы поток Ф оставался приблизительно постоянным (согласно уравнению U  E1
E1  f1Ф).
f1Ф).
Исследование работы двигателя при f1 fiн может быть проведено при помощи круговой диаграммы или расчетным путем. Здесь нужно учитывать, что индуктивные сопротивления х12, х1 и
x 2 изменяются пропорционально fi. Если при изменении fi напряжение изменяется непропорционально частоте, когда, следовательно, поток Ф не остается постоянным, то при определении х12 должно быть учтено не только изменение частоты, но и изменение насыщения машины. Если необходимо произвести исследование двигателя при частоте fi, значительно меньшей, чем fiн, то следует обратиться к точной круговой диаграмме, построенной с учетом γ1 (см. § 3-17).
3-21.3. Работа при несимметричных напряжениях
Работа трехфазного двигателя даже при небольшой несимметрии напряжений на его зажимах может привести к недопустимому нагреванию его обмоток, если он имеет на валу номинальную нагрузку или близкую к ней.
Исследование такой работы производится при помощи метода симметричных составляющих.
Заданную систему напряжений U a , U b , U c мы должны заменить двумя симметричными системами:
напряжениями прямой |
последовательности |
|
, |
2 |
, |
|
и |
напряжениями |
обратной |
U1 |
a U1 |
aU1 |
последовательности U 2 , a2U 2 , aU2 . В обычных случаях заданная система напряжений не имеет
|
|
|
|
|
|
|
|
|
|
|
|
U 0 , |
|
|
составляющих |
нулевой |
последовательности |
|
|
из-за отсутствия нулевого провода. Тогда |
|||||||||
|
|
|||||||||||||
определение U1 и U2 может быть произведено по заданным абсолютным значениям напряжений |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U a , |
U b , |
U c |
, векторы которых при U 0 |
= 0 образуют замкнутый треугольник. |
||||||||||
|
|
Аналогично уравнениям для токов I a1 и I a 2 |
(2-146) и (2-147) мы можем написать уравнения |
|||||||||||
|
|
и |
|
: |
|
|
|
|
|
|
|
|
|
|
для U1 |
U 2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
U1 |
3 |
|
(U a |
aU b |
a U c ); |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
U 2 |
3 |
(U a |
a U b |
aU c . |
(3-187) |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Согласно этим уравнениям на рис. 3-72 построена диаграмма для определения U1 и U 2 , из
которой мы находим не только абсолютные значения напряжений U1 и U 2 , но и взаимный сдвиг их по фазе.
|
U |
U |
|
U a |
U b |
U c |
|
|
|
Рис. 3-72. Определение |
|
|
2 при |
|
|
|
= 0. |
|
|
1 и |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
U 2 |
||
|
|
|
|||||||
Критерием для оценки несимметрии напряжений служит отношение U1 , которое иногда |
|||||||||
называют коэффициентом несимметрии. Значения |
U1 и U 2 |
определяются по рис. 3-72 или |
|||||||
аналитически. При аналитическом определении U1 |
и U 2 надо заданные напряжения расположить в |
||||||||
следующем порядке: Ua > Ub > Uc (в частном случае два напряжения из трех могут быть равны между собой). Предварительно находим:
a |
U a U b |
|
b |
Ub |
U c |
|
|
|
U b |
; |
Ub |
. |
|
|
|||
|
|
|
|
|||||
|
|
|
|
|
|
|
||
Далее рассчитываем: |
|
|
|
|||||
|
|
|
|
|
||||
x (a b) |
0,5(a2 |
b2 ) ; y 0,867 (1 b)2 (0,5 x)2 . |
||||||
После этого получим: |
|
|
|
|||||
U
U
|
|
|
|
|
|
y |
|
|
|
|
|
x |
|||||
b1 |
Ub |
1 |
|
|
|
|
|
|
|
|
j |
|
|
|
|
||
3 |
3 ; |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
y |
|
|
|
x |
|
|
|
|
|||||||
b 2 |
Ub |
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
и отсюда модули симметричных составляющих:
|
|
|
|
U b |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|||||||||
U |
|
U |
|
( 3 |
y) |
x |
|
|||||||||||||||
b1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
3 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
U b |
|
|
|
|
|
|
|
|
|
||||||||
U |
|
U |
|
|
|
x |
2 |
y |
2 |
|
|
|
|
|||||||||
b 2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
3 |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При симметричных обмотках статора и ротора мы можем считать, что обе системы напряжений U1 и U2, действуют независимо одна от другой При U1 > U2 ротор будет вращаться в сторону вращения поля, соответствующего напряжениям прямой последовательности U1. Будем это поле называть прямо вращающимся или прямым.
По отношению к напряжениям U1 машина будет работать в режиме двигателя со
s |
n1 n2 |
. |
|
|
|
||
скольжением |
n1 |
По круговой диаграмме или расчетным путем, как указывалось ранее, мы |
|
|
|
||
можем найти токи статора и ротора I1, и I 2 вращающий момент М при любом скольжении s. Токи I1, вызванные напряжениями U1, являются токами прямой последовательности.
Поле, соответствующее напряжениям обратной последовательности U2 будет вращаться против вращения ротора. Будем его называть обратно вращающимся или обратным. По отношению к напряжениям U2 машина будет работать в режиме тормоза со скольжением
n1 n2 |
|
n1 |
(n1 |
sn1 ) |
2 s |
n1 |
|
|
n1 |
|
|
|
|
|
. |
||
|
|
|
|
|
Токи статора, вызванные напряжениями U2, являются токами обратной последовательности.
Обозначим их через I12. Токи I 22 , наведенные в обмотке ротора обратным полем, будут иметь частоту (2 — s)f1 При малом s эта частота почти в 2 раза больше частоты тока статора.
3-21.3. Работа при несимметричных напряжениях
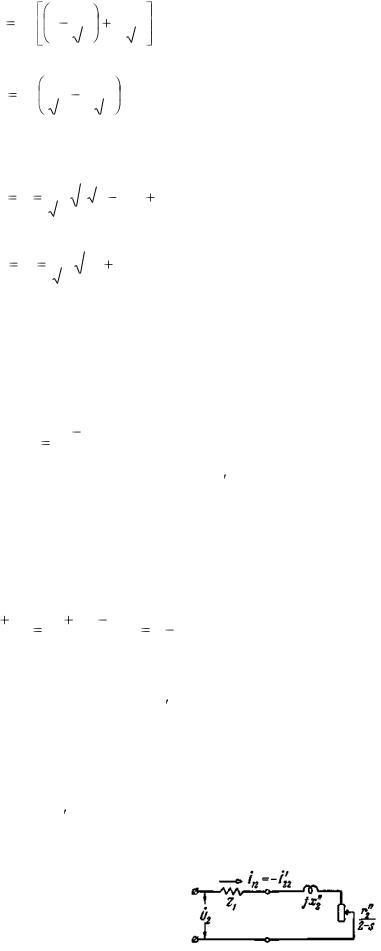
Токи I12 и I 22 можно определить по упрощенной схеме замещения, представленной на рис 3-
73.
Рис. 3-73. Приближенная схема для определения тока обратной последовательности.

Здесь мы пренебрегаем током синхронизма и принимаем с1 = 1, что допустимо при U2 |
U1. |
Сопротивления x2 и r2 являются сопротивлениями роторной обмотки, приведенными к статорной обмотке и рассчитанными с учетом вытеснения тока. Вытеснение тока здесь необходимо учитывать, так как частота тока ротора почти равна 2f1. Для двигателей с глубокими пазами и с двойной клеткой
являются сопротивлениями роторной обмотки, приведенными к статорной обмотке и рассчитанными с учетом вытеснения тока. Вытеснение тока здесь необходимо учитывать, так как частота тока ротора почти равна 2f1. Для двигателей с глубокими пазами и с двойной клеткой
на роторе r2 может быть больше r2 (рассчитанного без учѐта вытеснения тока) в 5-6 раз. Для фазного ротора, имеющего стержневую двухслойную обмотку при высоте стержней 1 см и больше,
может быть больше r2 (рассчитанного без учѐта вытеснения тока) в 5-6 раз. Для фазного ротора, имеющего стержневую двухслойную обмотку при высоте стержней 1 см и больше,
также получается заметное увеличение r2 по сравнению с r2 .
по сравнению с r2 .
Сопротивление схемы рис. 3-73 приблизительно равно сопротивлению короткого замыкания zк; следовательно, приближенно можем написать
|
|
I |
|
|
I |
|
|
|
U 2 |
U1н |
|
|
|
U 2 |
U1н |
|
U 2 |
I |
|
|
|
|||||||||
|
|
12 |
|
22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1к |
|
|
||||||
|
|
|
|
|
|
|
zк |
U1н |
|
|
U1н |
|
zк |
U1н |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(3-188) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
I |
|
|
U1н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1к |
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
к |
|
|
— |
|
ток |
короткого замыкания |
при |
напряжении U1н. Ранее указывалось, что для |
||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1к |
4 |
6 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|||||
нормальных двигателей |
1н |
|
|
|
, поэтому, учитывая (3-188), получим: |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
I12 |
|
|
I 22 |
|
|
U 2 |
|
I1к |
|
|
(4 |
6) |
U 2 |
|
|
|
|
|
|
|||||||||
|
|
I1н |
|
I1н |
U1н |
|
I1н |
|
|
U1н |
. |
|
|
(3-189) |
||||||||||||||||
Из (3-189) следует, что ток обратной последовательности может иметь большое значение:
|
U 2 |
100% |
5% |
|
|
|
|
||
например, даже при U1н |
токи I12 и |
I 22 будут составлять 20 30% номинального тока |
||
I1н. |
|
|
||
Тормозящий момент М2, соответствующий работе тормозом при U2, в обычных случаях несимметрии напряжений мал и им можно пренебречь Действительно, момент от обратного поля
|
|
m I |
|
2 r |
|
|
|
|
|
|
|
|
|
|
m I |
2 |
2r |
|
||||
M |
|
1 |
22 |
2 |
|
|
|
|
|
|
|
|
|
M |
1 |
2 |
|
|||||
2 |
ω1 (2 |
s) |
|
|
|
|
|
|
|
|
|
ω1s |
|
|||||||||
|
|
; момент от прямого поля |
|
, следовательно |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
M 2 |
|
|
( |
I 22 |
)2 |
r2 |
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
M |
|
|
|
|
I 2 |
r2 |
2 |
s |
. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U 2 |
0,05, |
I 22 |
|
|
0,3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
I 2 |
|
|||||
|
|
Мы видим, что при |
|
|
когда |
|
|
, и при обычных скольжениях s = 0,02 0,05, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
соответствующих номинальной нагрузке на валу, момент М2 не превышает в худшем случае 0,02 М.
Таким образом, ухудшение условий работы двигателя при несимметрии напряжений на его зажимах получается в основном из-за увеличения электрических потерь в его обмотках. Потери в
роторной обмотке увеличиваются на |
m I |
2 r |
I |
22 |
и |
I |
2 |
сильно отличаются |
||||
1 |
22 2 , (так как частоты токов |
|
|
|||||||||
одна от другой, и поэтому мы можем считать, что общие потери |
в роторной обмотке равны |
|||||||||||
m I |
2 |
2 r m I |
2 r |
|
|
|
|
m I 2 r |
(так как из общих |
|||
1 |
2 |
1 |
22 2 . Общие потери в статорной обмотке увеличиваются на |
1 |
12 1 |
|||||||
уравнений метода симметричных составляющих следует, что электрические потери в трехфазной
обмотке при наличии в ней токов прямой и обратной последовательностей равны |
m I 2 r |
m I 2 r |
1 1 1 |
1 12 1 ). |
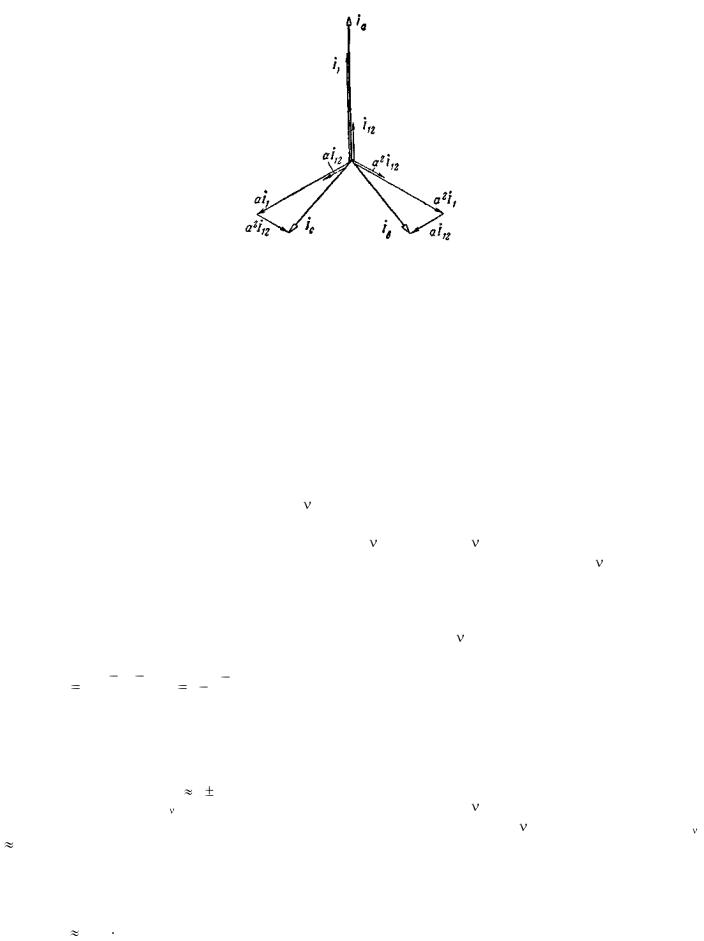
Приходится также считаться с тем, что в наихудшем случае в одной из фаз токи прямой и обратной последовательностей складывается арифметически (рис. 3-74). Нагревание ее в этом случае может быть чрезмерным.
Рис. 3-74. Определение токов фаз по их симметричным составляющим.
Отметим здесь, что асинхронный двигатель при его работе вхолостую или с нагрузкой создает выравнивающее действие на напряжения сети, к которой он подключен, т. е. уменьшает их несимметрию. Объясняется это тем, что распределение токов по фазам сети и обмотки статора будет соответствовать напряжениям фаз: больший ток будет поступать в ту фазу обмотки статора, к которой приложено большее напряжение. Выравнивающее действие трехфазного асинхронного двигателя на напряжения сети будет тем больше, чем меньше zк двигателя.
3-21.4. Работа при несинусоидальном напряжении
Если кривая напряжения сети, к которой подключен двигатель, имеет высшие гармоники, то действие каждой гармоники с частотой f = f1 можно рассматривать отдельно, так же как и действие основной (первой) гармоники При этом следует иметь в виду, что все индуктивные сопротивления и частота вращения поля при более высокой частоте ( > l) будут в раз больше, чем при основной частоте напряжения. Но число полюсов вращающегося поля, соответствующего -й гармонике напряжения, будет равно числу полюсов основного поля (здесь рассматриваются только основные пространственные гармоники н.с. и, следовательно, полей статора).
= f1 можно рассматривать отдельно, так же как и действие основной (первой) гармоники При этом следует иметь в виду, что все индуктивные сопротивления и частота вращения поля при более высокой частоте ( > l) будут в раз больше, чем при основной частоте напряжения. Но число полюсов вращающегося поля, соответствующего -й гармонике напряжения, будет равно числу полюсов основного поля (здесь рассматриваются только основные пространственные гармоники н.с. и, следовательно, полей статора).
Скольжение ротора относительно поля, соответствующего |
-й гармонике напряжения, |
||||||||||||
sν |
νn1 |
|
(1 s)n1 |
1 |
1 s |
|
|
|
|||||
|
|
νn1 |
|
|
|
ν |
, |
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где s — скольжение ротора относительно основного поля. При номинальном режиме работы |
|||||||||||||
|
|
|
|
|
|
1 |
1 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
двигателя скольжение s |
|
|
ν . Оно мало отличается от 1 (при |
> 5), |
т. е. практически можно |
||||||||
|
|
|
|||||||||||
принять, что двигатель по отношению к системе напряжений с частотой |
f1, находится в покое (s |
||||||||||||
1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда добавочный ток, созданный этой системой напряжений, |
|
||||||||||||
I ν |
U ν |
|
I1к |
|
|
|
|
|
|
|
|
|
|
U1н |
|
ν |
, |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|