

Асинхронные машины
.pdfОтложив на оси ординат в миллиметрах 100cosθ0 и 100cosθ1к и проведя через полученные точки параллели к оси абсцисс до пересечения с окружностью cosθ1, найдем направления токов I0 и
|
|
|
I 0 |
|
|
|
I 1к |
|
|
0 A0 |
|
0Aк |
|||||
I1к. Отрезки, соответствующие. этим токам, |
|
CI и |
|
CI . |
||||
|
|
|
|
|||||
Разделим отрезок Aа A0 пополам и проведем линию AсD параллельно оси абсцисс. Так как
A0 Aк — хорда окружности, центр которой лежит на линии AсD, то последний легко находится: он
лежит в точке пересечения перпендикуляра к отрезку A0 Aк , проведенного из середины этого
отрезка, и линии AcD. Найдя центр окружности 0к радиусом 0к A0 , проводим эту окружность, которая и представляет собой искомую круговую диаграмму асинхронной машины.
|
Проведем из точки Ак |
перпендикуляр к диаметру |
Ac |
D |
. Разделим получившийся отрезок |
||||
|
|
|
|||||||
|
|
|
Pс.к Pэм.к |
|
r1 |
|
|
|
|
Pс.к Aк таким образом, чтобы |
|
Pс.к Aк |
|
rк |
(сопротивление |
обмотки статора r1 должно быть |
|||
измерено, например, методом амперметра и вольтметра при постоянном токе). Линия, проведенная через точки Aс и Pэм.к, есть линия электромагнитных моментов М или линия электромагнитных мощностей Pэм.
Линия АсАк есть линия механических мощностей ротора P2 . Приближенно можно считать, что линия А0Ак представляет собой линию механических мощностей Р2 на валу машины.
Для более удобного определения скольжения воспользуемся следующим вспомогательным построением.
Возьмем на нижней полуокружности любую точку Тс и соединим ее прямой линией с точкой
Ас. Через точки Тс и A∞ проведем прямую линию и на ней отложим отрезок TcT , который удобно
разделить на 100 частей (например, TcT = 100 мм). Проведем линию ТcАк и затем — параллель TSк к линии TcAc до пересечений с линией ТcАк. Линия SкS0, проведенная параллельно ТТc, может служить
шкалой скольжения. Отрезок S0 Sк TcT соответствует скольжению, равному 1, или 100%. Если
теперь провести линию A1Tc, то полученный при этом на шкале скольжения отрезок S0 S1 (в долях от
S0 Sк ) определит скольжение при токе статора I1 = 0A1 , что доказывается следующим образом:
Ac P2 Pэм ~ |
SкTс S0 ; |
|
|
|
|
Ac A1Pэм ~ |
S1Tс S0 , |
|
|
|
|
так как |
|
|
|
|
|
P2 Ac Pэм |
SкTcT ; |
HAc A1 |
A1Tc Ac ; |
HAc Aк |
AкTс Aс , |
как углы, опирающиеся на общие дуги, а |
|
|
|||
HAc A1 |
Aс A1Pэм ; |
HAc P2 |
Ac P2 Pэм ; |
S0 SкTс |
SкTcT |
как накрест лежащие углы; из подобия треугольников имеем:

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pэм P2 |
|
S0Tc A c Pэм |
S0 S1 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Aс Pэм S0 Sк ; Pэм A1 |
S0Tc ; |
||||||||||||||||||||||||||
перемножая эти равенства и учитывая (3-186), получаем: |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
s |
|
Pэм P2 |
|
|
S0 S1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Pэм A1 |
|
S0 Sк . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Можно получить более крупный масштаб для определения s. Для этого надо провести линию, |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
параллельную линии S0Sк, на |
расстоянии, в а раз большем Tc S0 (Tc S0 aTc S0 ) . Тогда s будет |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
определяться отрезкам S0 S1 . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Таким образом, из диаграммы можно получить вcе основные величины, характеризующие работу машины:
|
|
|
|
|
|
|
|
|
|
|
P C |
|
|
P A |
|
P C |
|
|
P A |
|
M C |
|
P A |
|
|
||||||||||||||||
|
I1 |
|
CI 0A1 ; |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
p 1 1 ; |
|
2 |
|
|
|
p 2 1 ; |
|
|
|
M зм 1 ; |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S0 S1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
cos |
|
|
|
|
|
0K |
s |
|
|
|
|
|
η |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
S0 Sк |
|
|
|
|
|
P1 . |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
100 ; |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
Определение к.п.д. η по диаграмме недостаточно точно. Его можно определить точнее путем |
||||||||||||||||||||||||||||||||||||||||
расчета, взяв из круговой диаграммы I1, |
cosθ1, |
I 2 . В этом случае рассчитываем мощность Pl = |
|||||||||||||||||||||||||||||||||||||||
m1U1I1cosθ и потери в двигателе: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
P P m I 2 r |
|
|
|
|
|
m I 2 |
(r r ) |
|
|
P |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
0 |
1 |
1 175 |
|
|
1 |
2 |
|
к |
1 |
75 |
|
доб , |
|
|
|
|
|
|
|||||||||||||||||||||
|
P P m I 2 r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
где |
; |
I |
|
|
|
|
|
C |
|
|
|
A A |
; r175 и |
(r |
r ) |
|
— сопротивления |
обмоток статора и ротора, |
|||||||||||||||||||||||
0 |
0 |
|
1 0 1 |
|
2 |
|
|
|
|
|
I |
|
|
|
c |
1 |
|
|
к |
1 |
75 |
||||||||||||||||||||
приведенные к температуре 75° (§ 2-7); Рдоб = 0.005P1. После этого определяем к.п.д.: |
|||||||||||||||||||||||||||||||||||||||||
|
η |
|
P1 - |
|
|
P |
|
1 |
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
P1 |
|
|
|
|
|
|
|
P1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Круговая диаграмма |
|
|
позволяет, как |
указывалось, определить |
максимальный вращающий |
|||||||||||||||||||||||||||||||||||
M м
момент Мм и его кратность M н .
При токах в обмотках статора и ротора, соответствующих моменту Мн начинает сказываться насыщение зубцов от полей пазового и дифференциального рассеяния, что приводит к уменьшению
x1, и x2 и, следовательно, к увеличению Mм. Действительное значение Мм, как показывают опыты для нормальных машин, больше найденного из круговой диаграммы примерно в 1,1  1,15 раза.
1,15 раза.
Определение пусковых характеристик (§ 3-19) по круговой диаграмме не может быть точным, так как при больших токах и скольжениях параметры машины перестают быть постоянными и диаграмма тока перестает быть круговой. Она может быть использована только для построения рабочих характеристик и приближенно для определения Мм.
По круговой диаграмме могут быть также найдены основные величины, характеризующие работу генератора. Для этого режима работы имеем:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1 CI 0A1(г) ; P1 |
C p P2 A1(г) ; P2 |
|
C p P1 A1(г) ; M CМ Pэм A1(г) ; |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
S0 S1(г ) |
|
|
|
P2 |
|
||||||
cos |
|
|
0K1(г ) |
s1(г ) |
η |
|
|||||||||||||||
|
|
|
|
|
|
|
|
S0 Sк ; |
|
P1 . |
|||||||||||
1(г ) |
100 ; |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
в) Определение рабочих характеристик расчетным путем.
С достаточной для практики точностью рабочие характеристики двигателя могут быть определены расчетным путем (без круговой диаграммы), если известны параметры машины, найденные из ее расчета или по данным опытов холостого хода и короткого замыкания.
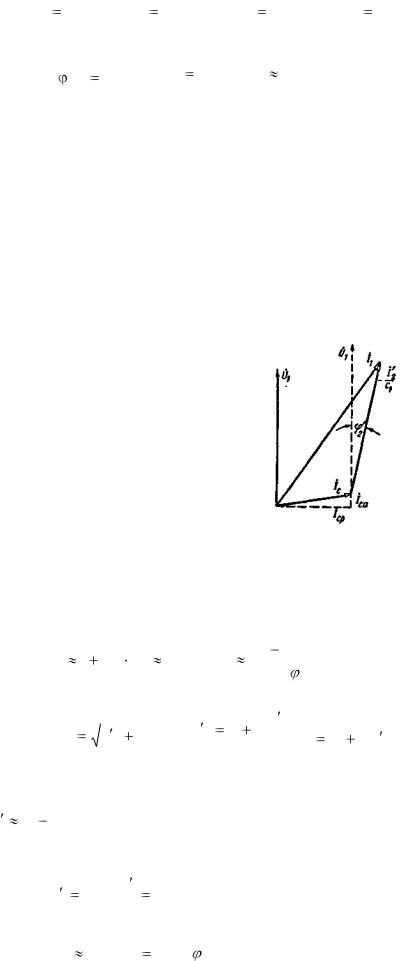
Необходимые расчетные формулы составляются при помощи схемы замещения, представленной на рис. 3-49, и соответствующей ей векторной диаграммы, изображенной на рис. 3- 56.
Рис. 3-56. К расчетному определению рабочих характеристик двигателя.
Напишем эти формулы в том порядке, в каком рекомендуется производить расчеты, причем в скобках укажем, как рассчитываются отдельные величины по опытным данным:
c |
1 |
x1 |
(x |
0,5x |
|
; |
x |
U1 |
I 0 x1 |
) |
|
|
к |
|
|
|
|||||||
1 |
|
1 |
|
|
12 |
I 0 |
sin 0 |
|
|||
1) |
|
x12 |
|
|
|
|
; |
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
rк.s |
r1 |
c1 |
r2 |
|
|
|
|
|
|
|
|
zк.s |
rк.2s |
xк2 |
x |
|
x c x |
|
||||||||
2) |
s ; |
к |
2 |
||||||||||||
|
|
|
, где |
|
|
|
|
1 |
1 |
||||||
( r2 rк |
r1 ; |
r1 измеряется при постоянном токе;. rк и хк определяются по данным опыта короткого |
||||||
замыкания); |
|
|
|
|
|
|
|
|
|
I 2 |
|
U1 |
|
I 2 |
|
U1 |
|
3) |
|
zк.s ; c1 |
|
c1 zк.s ; |
||||
|
|
|
||||||
4) |
Iср |
|
I0р |
(I0р |
|
I0 sin 0 ) ; |
||
|
|
|
P |
|
m I 2 r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
I са |
|
|
c1 |
1 |
|
c 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
5) |
|
|
|
|
m1U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pс1 |
P0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
(можно принять |
|
2 ; |
|
Ic |
|
I0 ); |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
cos |
|
|
|
|
rк.s |
|
|
sin |
|
|
|
|
xк |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
2 |
|
|
zк..s ; |
|
2 |
|
|
zк..s ; |
|
|
|
|
|
|
|
|
|
||||||||||||
6) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
I |
|
|
I 2 |
cos |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1а |
|
|
|
са |
|
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c1 |
|
|||||||
7) |
активный ток статора |
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
I |
|
|
|
I 2 |
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1р |
|
ср |
|
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c1 |
|
||||||
8) |
реактивный ток статора |
|
|
|
|
|
|
|
|
|
; |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
cos |
|
|
|
|
I1а |
|
|
|
|
|
|
|
|
|
|||||
|
I1 |
|
|
I |
2 |
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
9) |
|
|
1а |
I1р |
; |
|
|
|
|
|
|
|
1 |
|
|
; |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
10)электрическая мощность статора P1 = m1U1I1cosθ1;
11)электрические потери в обмотках статора и ротора
P |
m I 2 r |
; |
P |
m I 2 r |
; |
э1 |
1 1 1 |
э2 |
1 2 2 |
12) потери холостого хода за вычетом электрических потерь
P |
P |
m I 2 r |
P |
P |
P |
|
|
|
|
||
0 |
0 |
1 |
0 1 |
|
c1 |
мех |
с.д ; |
|
|
|
|
13) |
добавочные потери при нагрузке |
P |
0,005P |
; |
|||||||
доб |
1 |
||||||||||
14) сумма всех потерь |
P |
Pэ1 |
Pэ2 |
P0 |
Pдоб ; |
|
|||||
15) |
мощность на валу P2 |
P1 |
P ; |
|
|
|
|||||
|
к.п.д. η |
1 - |
P |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
16) |
P1 . |
|
|
|
|
|
|
||||
При расчете по приведенным формулам нужно задаваться значениями скольжения примерно в пределах s = (0,2  1,3), где номинальное скольжение sн предварительно может быть взято из кривой рис. 3-57. Достаточно произвести расчеты для пяти-шести значений скольжения, выбирая их приблизительно через равные интервалы.
1,3), где номинальное скольжение sн предварительно может быть взято из кривой рис. 3-57. Достаточно произвести расчеты для пяти-шести значений скольжения, выбирая их приблизительно через равные интервалы.
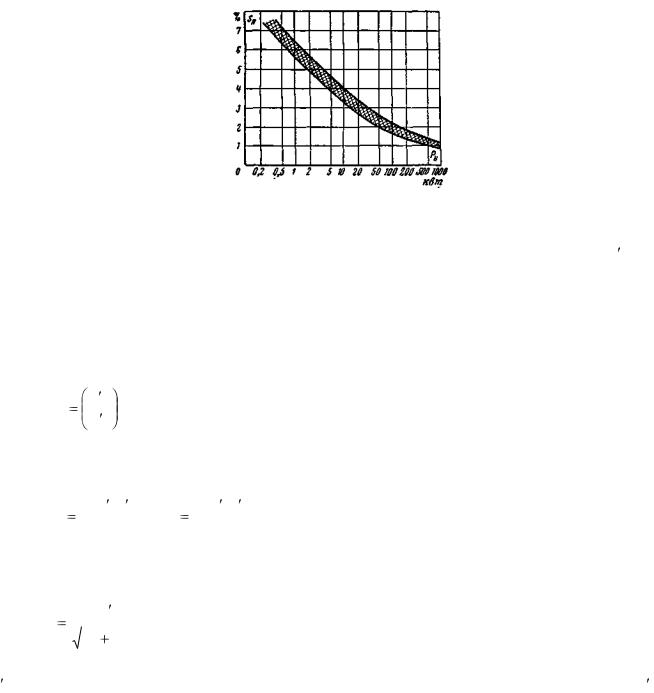
Рис. 3-57. Приближенные кривые зависимости sн = f(Рн)
После того как по расчетным точкам построены кривые I1, cosθ1; η; s; I 2  f (P2 ) , определяются номинальные величины, соответствующие номинальной мощности на валу P2н (рис. 3- 54).
f (P2 ) , определяются номинальные величины, соответствующие номинальной мощности на валу P2н (рис. 3- 54).
Расчетным путем можно также определить кратность максимального вращающего момента по соотношению
|
M м |
|
|
I2м |
|
2 sн |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M н |
|
|
I2н |
|
|
sк , |
|
|
|
|
|
|
которое получается из равенства |
|
|
|||||||||||
|
|
|
m I 2 r |
|
|
m I |
2 r |
|
|||||
M м |
|
|
1 2м |
2 |
|
|
M |
|
1 2м 2 |
|
|||
|
|
ω1 sк |
|
|
|
н |
ω1 sн |
|
|||||
|
|
|
|
|
и |
|
|
. |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь критическое скольжение [см. (3-130)]
sк |
|
c1r2 |
|
|
|
|
|
|
|
|
|
r 2 |
x2 |
||||
|
|
1 |
к ; |
||
I 2м — приведенный ток ротора, рассчитанный по формулам пп. 1  3 для скольжения sк; I 2н и sн берутся из построенных кривых.
3 для скольжения sк; I 2н и sн берутся из построенных кривых.
3-19. Пуск в ход
а) Общие замечания.
Вопросы, связанные с пуском в ход электрических двигателей, имеют большое практическое значение. При их разрешении приходится считаться с условиями работы сети, к которой приключается двигатель, и с требованиями, которые предъявляются к электроприводу. Под электроприводом понимается устройство, состоящее из электродвигателя вместе с относящейся к нему аппаратурой и предназначенное для приведения во вращение рабочей машины (какого-либо станка, насоса, вентилятора, экскаватора, прокатного стана, конвейера и др.).
Для оценки пусковых свойств электродвигателя установлены следующие основные показатели:
1. начальный пусковой ток Iнач или его кратность Iнач/Iн;
2. начальный пусковой момент Мнач или его кратность Мнач/Мн.
Кроме того, в ряде случаев имеет значение продолжительность разбега двигателя вместе с приводимым им во вращение механизмом и иногда плавность разбега.
б) Двигатели с контактными кольцами.
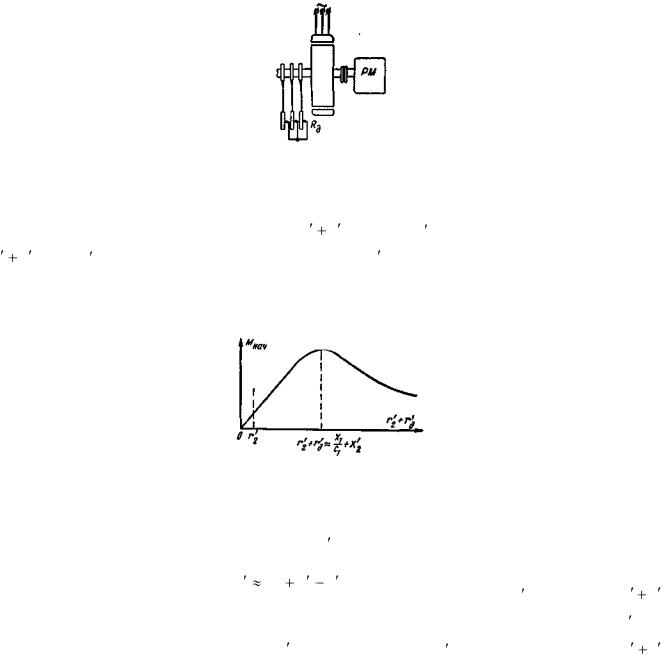
Двигатели с контактными кольцами пускаются в ход при помощи реостата, включаемого в роторную цепь и называемого пусковым. Соответствующая схема приведена на рис. 3-58.
Рис 3-58. Схема пуска в ход трехфазного асинхронного двигателя с контактными кольцами (РМ — рабочая машина).
По формуле (3-134), подставив в нее r2 rд вместо г r2 , можно найти зависимость Мнач =
f( r2 rд ), где r2 — сопротивление обмотки ротора, а rд — переменное сопротивление пускового реостата (оба сопротивления приведены к обмотке статора). Эта зависимость представлена на рис. 3- 59.
Рис. 3-59. Зависимость начального вращающего момента от активного сопротивления роторной цепи.
Она показывает, что при увеличении |
rд начальный момент Мнач |
сначала возрастает |
и |
||||||
|
rд |
x1 |
|
x2 |
r2 |
|
|
|
|
|
c1 |
|
r2 нужно взять |
r2 |
rд |
|
|||
достигает, максимума при значении |
|
|
|
[см. (3-131), где вместо |
и |
||||
принять sк = 1] и затем падает. Одновременно с возрастанием Мнач при увеличении |
rд |
будет |
|||||||
уменьшаться Iнач вместе с уменьшением |
I2нач |
[см. (3-128), где r2 нужно заменить через |
r2 |
rд |
и |
||||
взять s = l]. С физической стороны это будет ясно, если мы обратимся к выражению (3-113), полученному согласно закону электромагнитных сил. Оно показывает, что момент зависит не только от I2, но и от соsψ2 (см. также рис. 3-42).
На рис. 3-60 показано изменение вращающего момента при выключении ступеней пускового реостата за время разбега двигателя.
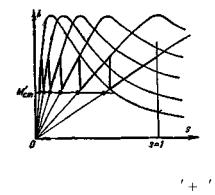
Рис. 3-60. Кривые М = f (s) при различных сопротивлениях r2 rд роторной цепи (зигзагообразная линия соответствует изменению пускового момента при выключении ступеней реостата во время разбега двигателя).
Двигатель с контактными кольцами, пускаемый в ход при помощи пускового реостата, обладает хорошими пусковыми характеристиками. Здесь за все время разбега мы можем иметь большой пусковой момент и тем самым сократить время разбега. При этом пусковой ток имеет относительно небольшое значение и, следовательно, подключение двигателя к электрической сети, особенно маломощной, не будет вызывать резких изменений режима ее работы.
Пусковые реостаты изготовляются из проволоки или ленты, обычно намотанной в виде спирали на фарфоровые столбики. Для проволоки или ленты берут металл повышенного удельного сопротивления (нихром, фехраль и др.), обладающий высокой износоустойчивостью, и иногда железо или чугун. Такие реостаты имеют воздушное охлаждение, если они предназначаются для частых пусков в ход, или масляное охлаждение. В последнем случае спирали помещаются в баке с маслом. Переключение ступеней реостата, присоединенных к контактам, помещенным на доске из изоляционного материала, производится при помощи ручки, скользящей по контактам.
Применяются также жидкостные пусковые реостаты, состоящие обычно из бака с содовым раствором и пластин, опускаемых в бак. Пластины соединяются со щетками, наложенными на контактные кольца.
Следует иметь в виду, что пусковые реостаты рассчитываются на кратковременную нагрузку, и поэтому их ступени нельзя оставлять на долгое время под током во избежание чрезмерного нагрева.
Иногда двигатели с контактными кольцами снабжаются приспособлением, позволяющим замкнуть кольца накоротко, когда выведен весь реостат, и при этом поднять щетки. Таким. образом, устраняются потери на трение щеток о кольца и электрические потери в их переходных контактах. В последние годы от таких приспособлений отказываются, так как их применение удорожает двигатель и усложняет уход за ним.
При пуске в ход двигателя с контактными кольцами нужно до включения рубильника или масляного выключателя убедиться в том, что весь реостат введен в цепь ротора. После включения надо пусковое сопротивление выводить постепенно, чтобы стрелка амперметра, который должен быть включен в цепь статора, не отклонялась дальше допустимого значения.
в) Короткозамкнутые двигатели.
Короткозамкнутые двигатели обычно пускаются в ход путем непосредственного включения их в сеть. Такие двигатели выполняются, как отмечалось, с роторной обмоткой в виде беличьей клетки.
Круглые пазы на роторе и соответствующие им круглые медные стержни в настоящее время применяются только для малых машин, причем и для таких машин более часто применяется алюминиевая клетка, полученная путем заливки пазов расплавленным алюминием. В малых
машинах сопротивление r2 получается относительно большим, поэтому здесь и при круглых пазах создается достаточный момент Мнач. Что касается начального пускового тока, то в случае малых машин он обычно не имеет большого значения.
Для короткозамкнутых машин с алюминиевой обмоткой мощностью свыше 2  3 кВт пазам ротора придается форма, показанная на рис. 3-20,б, в и г, причем при больших мощностях (> 20
3 кВт пазам ротора придается форма, показанная на рис. 3-20,б, в и г, причем при больших мощностях (> 20  30 кВт) применяются тем более глубокие пазы, чем больше мощность машины.
30 кВт) применяются тем более глубокие пазы, чем больше мощность машины.
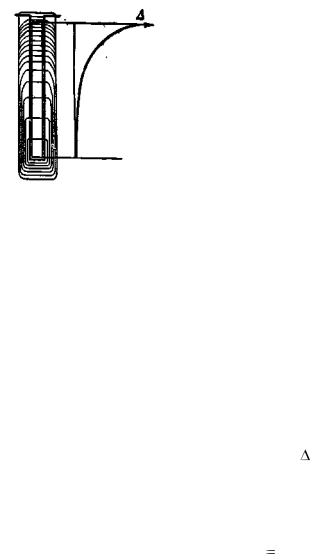
При мощности свыше 120—150 кВт на роторе применяются узкие глубокие пазы (при ширине паза 5—6 мм и глубине его до 50  55 мм). В них закладываются узкие высокие медные стержни. Такой паз вместе с заложенным в него стержнем показан на рис. 3-61. Здесь же приведена примерная картина поля пазового рассеяния.
55 мм). В них закладываются узкие высокие медные стержни. Такой паз вместе с заложенным в него стержнем показан на рис. 3-61. Здесь же приведена примерная картина поля пазового рассеяния.
Рис. 3-61. Глубокий паз с узким высоким стержнем и распределение плотности тока по высоте стержня.
Применение глубоких пазов на роторе улучшает пусковые характеристики короткозамкнутых двигателей, что вытекает из следующих рассуждений.
Представим себе, что стержень по высоте разделен на большое число слоев. Нижние слои сцепляются с большим числом индукционных линий, чем верхние слои. Поэтому их индуктивное сопротивление больше, чем верхних слоев. При большой частоте тока /2 = sf1 (например, при s = 1) индуктивное сопротивление отдельных слоев значительно больше их активного сопротивления, вследствие чего распределение тока по слоям будет определяться в основном их индуктивными сопротивлениями.
На рис. 3-61 справа показано примерное распределение плотности тока (имеется в виду действующее значение тока) по сечению стержня при f2 = fi. Мы видим, что ток в стержне вытесняется к открытию паза. Площадь сечения его используется не полностью. Вследствие этого увеличивается активное сопротивление обмотки r2, что приводит к повышению начального пускового момента. Начальный пусковой ток при этом уменьшается, но сравнительно мало, так как
из-за вытеснения тока в стержне несколько уменьшается х2. Уменьшение x2s 2πsf1Lζ2 при больших скольжениях вызвано тем, что площадь, через которую проходят трубки поля пазового рассеяния, становится меньше (они в основном проходят, как показано на рис. 3-61, в верхней части паза); при этом уменьшается магнитная проводимость для них и, следовательно, индуктивность рассеяния Lζ2.
По мере возрастания частоты вращения частота f2 уменьшается и при номинальной частоте вращения имеет небольшое значение. Ток при этом практически распределяется равномерно по всему сечению стержня, так как его распределение теперь будет определяться в основном активными сопротивлениями отдельных слоев, на которые мы мысленно подразделили стержень. Следовательно, f2 автоматически уменьшится.
|
M |
I |
f (n2 ) |
|
|
|
|
|
|
|
M п и |
I н |
||
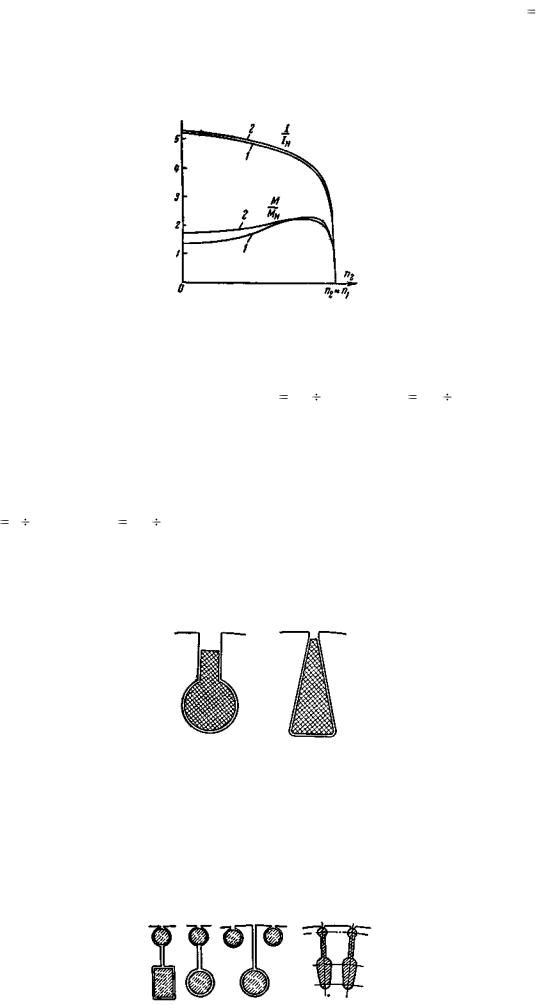
На рис. 3-62 представлены пусковые характеристики |
для |
|||
короткозамкнутого двигателя с глубокими пазами на роторе (здесь вместо абсолютных значений тока статора I и вращающего момента М взяты их отношения к номинальным значениям Iн и Мн, что является более показательным).
Рис. 3-62. Пусковые характеристики короткозамкнутых двигателей. 1-с глубокими пазами, 2—с двойной клеткой.
|
M нач |
1,2 |
1,5 |
|
I нач |
4,5 |
6 |
||
|
M |
|
|
I |
|
||||
Для таких двигателей обычно получают |
н |
|
|
при |
н |
|
. |
||
|
|
|
|
|
|
|
|||
При менее глубоких пазах, которые применяются при алюминиевой клетке для двигателей небольшой и средней мощности (до 100 кВт) эти отношения составляют:
M нач |
1 |
1,4 |
Iнач |
5,5 |
6,5 |
||
M |
|
I |
|
||||
н |
|
при |
н |
|
. |
||
|
|
|
|
|
|
||
В последние годы для короткозамкнутых роторов применяются пазы в виде представленных на рис. 3-63.
Рис. 3-63. Пазы короткозамкнутого ротора.
Здесь также получается увеличение r2 из-за вытеснения тока, но при меньшей глубине паза, чем в случае глубоких пазов по рис. 3-61.
М.О. Доливо-Добровольский впервые применил для короткозамкнутых двигателей двойную клетку на роторе (1893 г.). Применяемые при этом пазы показаны на рис. 3-64.
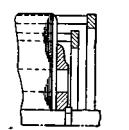
Рис. 3-64. Пазы ротора с двойной клеткой
Вверхних пазах помещают стержни повышенного активного сопротивления, в нижних пазах
—стержни с относительно малым активным сопротивлением.
Индуктивное сопротивление нижних стержней получается в несколько раз больше индуктивного сопротивления верхних стержней в соответствии с различием потокосцеплений тех и других. Потокосцепление нижних стержней определяется главным образом размерами прореза между верхней и нижней частями паза. Так как распределение тока между стержнями при больших скольжениях зависит в основном от их индуктивных сопротивлений, значительно превышающих их активные сопротивления, то ток вытесняется в верхние стержни, образующие клетку, называемую пусковой
При малых скольжениях распределение тока будет зависеть в основном от активных сопротивлений клеток. Ток при этом будет проходить главным образом по нижней клетке, которая называется рабочей.
При пуске, когда ток проходит главным образом по верхним стержням, они сильно нагреваются. Чтобы нагрев верхних стержней за время пуска не получился чрезмерным, их выполняют из латуни или бронзы, чем достигается увеличение теплоемкости стержней вследствие увеличения их веса при одновременном увеличении их активного сопротивления (по сравнению с медными стержнями).
Неодинаковое нагревание верхних и нижних стержней при пуске приводит к неодинаковому их удлинению. Поэтому для двигателей с большой длиной ротора приходится применять отдельные короткозамыкающие кольца для верхних и нижних стержней (рис 3-65; см также рис 3-126).
Рис 3-65. Ротор с двойной клеткой.
При выполнении двойной клетки из алюминия применяются пазы формы, показанной на рис 3-64 справа. На торцах обе клетки в этом случае имеют общие короткозамыкающие кольца.
Двигатели с двойной клеткой на роторе позволяют получить лучшие пусковые характеристики (рис. 3-62), чем двигатели с глубокими пазами на роторе, что достигается путем выбора надлежащих соотношений между параметрами верхней и нижней клеток. Поэтому в случае необходимости иметь короткозамкнутый двигатель с повышенным пусковым моментом при относительно небольшом пусковом токе его выполняют с двойной клеткой на роторе.
Короткозамкнутые двигатели иногда пускаются для ограничения пускового тока при пониженном напряжении. Для этой цели в цепь статора на время пуска включают активное сопротивление, реактор или автотрансформатор (§ 4-8,д).
Применяется также пуск при переключении обмотки статора со звезды на треугольник (рис. 3-66), если при данном напряжении сети она должна быть соединена в треугольник.