

Асинхронные машины
.pdfЗдесь угловая частота ω 2 f , а индуктивность рассеяния
L w2 . (3-164)
где — некоторая расчетная проводимость для индукционных трубок поля рассеяния. Из (3-163) и (3-164) получаем:
x 2πfw2 Λ . (3-165)
Индукционные линии поля рассеяния, например статора, условно делят на три группы; в соответствии с этим различают три вида рассеяния: пазовое, дифференциальное и лобовых частей
обмотки. Если ввести коэффициенты проводимости — пазового рассеяния λп , дифференциального
рассеяния λд , и рассеяния лобовых частей λл , отнесенные к единице длины статора или ротора l, то выражение (3-165) после ряда преобразований примет следующий вид, Ом:
x 0,158 |
f |
( |
w |
) |
2 |
l |
λ |
|
|
|
|
|
|
||||
|
100 100 |
|
|
pq |
, |
(3-166) |
||
|
|
|
|
|
|
|
||
где
λλп λд λл . (3-167)
Коэффициент проводимости пазового рассеяния λп для диаметральных двухслойных обмоток (y = η ) и для однослойных обмоток зависит только от геометрических размеров паза. Его определяют по потокосцеплению индукционных линий, проходящих поперек паза, с проводниками, лежащими в пазу (рис. 3-52).
Рис. 3-52. К определению λп .
При этом пренебрегают магнитным сопротивлением индукционных трубок пазового поля рассеяния вне паза и считают, что сопротивление для них определяется только расстояниями между стенками паза в той части, где лежат проводники, и в части паза над проводниками. Очевидно, что это сопротивление будет тем меньше, чем больше глубина паза (h1 + h2 + h3 + h4) и чем меньше его ширина bп.
Для хордовых двухслойных обмоток (y < η) коэффициент λп зависит также и от значения
β y
y
η, так как при β < 1 в некоторых пазах находятся катушечные стороны, принадлежащие разным
фазам (рис. 3-15), вследствие чего общее потокосцепление какой-либо катушечной стороны в этих пазах уменьшается. Следовательно, пазовое рассеяние при y < η будет меньше, чем при y = η.

Расчет λп производится по формулам:
λ |
|
|
k |
|
( |
h1 |
|
|
h2 |
) |
|
|
|
|
|
|
|
|
||||
п |
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
3b |
b |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
п |
п |
|
|
|
|
|
|
|
|
||||
(для паза по рис. 3-52,а); |
|
|
|
|
|
|
|
|
||||||||||||||
|
λ |
|
|
k |
|
|
( |
h1 |
|
|
h2 |
|
|
2h3 |
|
h4 |
) |
|
|
|||
|
п |
|
β |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
3b |
|
b |
|
a b |
|
a |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
п |
|
|
п |
|
|
п |
|
|
|
|
|
|
(для паза по рис. 3-52,б), где |
kβ |
0,75β |
0,25 |
. |
||||||||||||||||||
|
|
|
|
|
||||||||||||||||||
Для нормальных машин λп = 0,8 |
2. |
|
||||||||||||||||||||
Коэффициент проводимости дифференциального рассеяния λд в большой степени зависит от числа пазов q1 (или q2). шага обмотки. Рассматриваемое рассеяние определяется потокосцеплениями, которые создают высшие гармоники поля, например, статора с его обмоткой. Они наводят в обмотке э.д.с. той же частоты, что и 1-я гармоника поля (§ 3-4,б). Практически они зависят только от тока статора и от проводимости воздушного зазора. Просуммировав указанные э.д.с. и разделив полученную сумму на ток, мы найдем сопротивление хд, соответствующее дифференциальному
рассеянию (или высшим гармоникам поля). От хд мы можем перейти к коэффициенту λд . Его
значение λд = 1  2,5. Оно тем меньше, чем больше число пазов q, длина воздушного зазора δ и чем ближе у к 0,83 η .
2,5. Оно тем меньше, чем больше число пазов q, длина воздушного зазора δ и чем ближе у к 0,83 η .
Для упрощения расчетов иногда составляют эмпирические формулы, рассматривая вместо дифференциального рассеяния поле рассеяния между соседними коронками (внешними поверхностями) зубцов. Индукционные трубки этого поля проходят через воздушные зазоры и частично через коронки зубцов противолежащей части машины. Их магнитная проводимость
определяется в основном длиной воздушного зазора δ .
Коэффициент проводимости рассеяния лобовых частей обмотке λл зависит от длины лобовой части. Его значение λл = 0,6 1,5.
В относительных единицах измерения
x* |
I1н x1 |
|
x * |
I1н x2 |
|
|
|
|
|
1 |
U1н ; |
2 |
U1н . |
|
|
|
|
||
|
|
|
(3-168) |
|
|||||
Для нормальных машин |
x* |
x |
* 0,09 0,13 |
о.е. |
|||||
1 |
2 |
|
|||||||
|
|
|
|
|
|
|
|
||
При больших скольжениях (s > 0,10), при которых обычно в обмотках имеют место большие |
|||||||||
токи, х1 и х2 несколько уменьшаются, |
так как уменьшаются λп и хд из-за насыщения тех стальных |
||||||||
участков, по которым частично проходят индукционные трубки соответствующих полей рассеяния. Кроме того, х2 уменьшается из-за неравномерного распределения тока по сечению стержней обмотки ротора, с чем приходится считаться при глубоких пазах и высоких стержнях (§ 3-19,в).
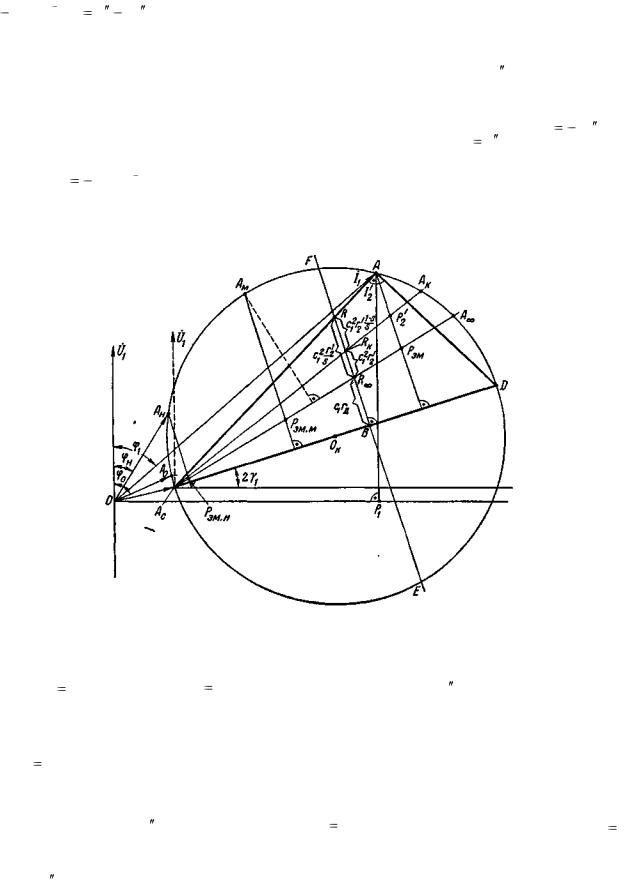
3-17. Круговая диаграмма
Круговая диаграмма асинхронной машины представляет собой геометрическое место концов
вектора тока I1 , изменяющегося при изменении скольжения s в пределах от + ∞ до -∞, если при этом напряжение на зажимах статора машины и все ее параметры сохраняют постоянные значения. Ее называют также диаграммой тока. Она дает наглядное представление о важных зависимостях между величинами, характеризующими работу асинхронной машины.
Обратимся к схеме замещения, представленной на рис. 3-49. Введем обозначение:
I 2 |
I 2 |
|
C1 . |
|
|
|
(3-169) |
Тогда в соответствии со схемой замещения и уравнениями (3-120) и (3-121) можем написать:
|
|
2 |
r2 |
|
2 |
|
|
|
|
|
|
|
|||
U1 |
I 2 (C1r1 |
C1 |
s |
) |
jI 2 (C1 x1 |
C1 |
x2 ) . |
(3-170) |
|
|
|
|
|||
Комплексный коэффициент C1 согласно (3-126) равен: |
|
|
|
|
|||||||||||
C |
Z1 Z12 |
|
r1 |
|
r12 |
j(x1 |
x12 ) |
c e jγ1 |
c (cosγ |
|
j sin γ |
|
) |
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|||||
1 |
Z12 |
|
|
|
r12 |
jx12 |
|
|
1 |
1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
, |
(3-171) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где
|
(r |
r )2 |
(x |
x )2 |
|
1 |
12 |
1 |
12 |
|
|
c1 |
|
|
|
|
|
|
r 2 |
x2 |
(3-172) |
||
|
|
12 |
12 |
||
|
|
|
|
||
и
tgγ1 |
|
|
|
|
r12 x1 |
|
r1 x12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
r12 (r1 |
r12 ) |
|
|
x12 (x1 x12 ) . |
|
|
|
(3-173) |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Подставив в (3-170) значение C1 |
по (3-171), будем иметь: |
|
|
|
|
|
|
||||||||||||||||||||
|
|
j 2γ |
|
|
jγ1 |
2 r2 |
|
|
|
|
j 2γ1 |
|
jγ1 |
2 |
|
|
|
|
|
|
|
||||||
U1 |
I 2 e |
|
(c1r1e |
|
|
c1 |
s |
) |
|
jI 2 e |
|
|
(c1 x1e |
|
c1 x2 ) |
|
|
|
|
|
|
|
|||||
I |
e j 2γ1 [c r (cosγ |
|
j sin γ |
|
) |
c 2 |
|
r2 |
] |
jI e j 2γ1 |
[c x (cosγ |
|
j sin γ |
|
) |
c 2 x |
|
], |
|||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||
2 |
|
|
1 1 |
|
|
1 |
|
|
|
1 |
|
|
1 s |
2 |
|
1 1 |
1 |
|
1 |
|
1 |
2 |
|
||||
что после преобразований дает:
|
|
j 2γ1 |
|
j 2γ1 |
|
|
U1 |
I 2 rдs e |
|
jI 2 xд e |
|
, |
(3-174) |
|
|
|
|
|
где
r |
|
c [r (cosγ |
|
|
x sin γ |
|
) |
c2 |
r2 |
|
|||
|
|
|
|
|
|
|
|
||||||
дs |
1 |
1 |
1 |
1 |
1 |
|
1 |
s ; |
(3-175) |
||||
x |
|
c [x (cosγ |
|
r sin γ |
|
) |
c2 x |
2 . |
(3-176) |
||||
|
д |
1 |
1 |
|
1 |
1 |
1 |
|
1 |
|
|||
Разделив (3-174) на jxд e j 2γ1 , получим:
|
|
|
|
|
rд.s |
|
|||
U1 |
|
j 2γ1 |
|
||||||
I |
|
e |
|
I 2 |
jI |
2 |
|
|
|
xд |
|
xд . |
|
||||||
|
|
|
|
|
|
(3-177) |
|||
Три вектора полученного уравнения токов образуют при токе I 2 , соответствующем некоторому скольжению s, прямоугольный треугольник AcAD, представленный на рис. 3-53, где
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rд.s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
U |
|
|
|
|
|
|
|
|
I2 |
|
AD |
jI 2 |
xд |
|
вектор |
направлен по вертикали. В этом треугольнике |
катеты |
Ac A |
, и |
|||||||||||
1 |
|
|
и |
|
|
||||||||||
|
|
|
A D |
j U1 |
e j 2γ1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xд |
|
|
|
|
|
|
|
|
|
||
гипотенуза |
|
|
|
|
(в соответствии с обычными |
соотношениями |
между |
параметрами |
|||||||
|
|
|
|
|
|||||||||||
асинхронной машины принято, что угол γ1 имеет отрицательное значение).
|
|
|
|
|
|
Рис. 3-53. Круговая диаграмма асинхронной машины. |
|
|
|
|
||||||||
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
При |
1 |
const |
отрезок |
Ac D const |
. Поэтому конец вектора |
|
|
|
|
|||||||||
|
|
|
|
2 (вершина прямого угла А) |
||||||||||||||
при изменении скольжения s опишет окружность, имеющую диаметр |
|
|
|
|
|
|||||||||||||
|
|
|
U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ac D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
xд . |
(3-178) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
I |
|
|
|
|
I 2 |
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 Ac |
|
|
|
|
|
|||
Прибавив к вектору |
|
|
|
получим вектор первичного тока |
0 A |
. |
||||||||||||
2 постоянный вектор |
|
|
1 |
|
|
|||||||||||||
Отсюда следует, что конец вектора тока I1 |
при изменении s будет скользить по той же окружности, |
|||||||||||||||||
что и вектор I2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Отложим в произвольном масштабе Ac B xд ; тогда в том же масштабе BR rд.s , так как треугольник сопротивлений AcBR и треугольник токов AcAD подобны. Отрезок AcR в масштабе
сопротивлений, очевидно, равен |
z |
|
r 2 |
x2 |
|
|
||||||||||||
|
|
|||||||||||||||||
|
д.s |
д.s |
д . Теперь разделим отрезок BR на части: |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
BR |
c1 (r1 cosγ1 |
x1 sin γ1 ) |
|
c1rд ; |
|
|
|
|
|||||||||
|
|
|
c2r |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
R R |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
к |
1 |
2 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 s |
( |
|
c2 |
r2 |
) |
|
|
|
|
|
|||||
|
R R с2r |
R R |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
к |
1 |
|
s |
|
|
|
1 s . |
|
|
|
|
||||||
При уменьшении s точка R. будет скользить вверх по прямой EF; соответствующая точка А будет скользить по окружности влево.
При s = 0 точка R уходит в бесконечность, точка А совпадает с точкой Aс, и мы получаем ток синхронизма I c .
При увеличении s точка R смещается вниз и точка А скользит вправо; при s = l точка R совпадает с точкой Rк, а точка А — с точкой Ак. Режим работы асинхронной машины при s = 1 по
аналогии с трансформатором называется режимом короткого замыкания. Ток I к 0 Aк (не показан на рис. 3-5З) — ток короткого замыкания.
Дуга АcААк соответствует работе машины двигателем, так как по ней будет скользить ток
I1 при изменении s от 0 до 1. При дальнейшем увеличении s от 1 до + ∞ точка R перемещается вниз, точка А — вправо и при s = + ∞ точка R попадает в точку R∞, а точка А — в точку А∞. Малая дуга АкА∞ соответствует изменению s от 1 до + ∞ и, следовательно, работе машины тормозом.
При s = -∞ точка R также совпадает с точкой R∞, а точка А — с точкой A∞. При отрицательном s и при его уменьшении по абсолютной величине точка R скользит вниз от R∞, а точка А — вниз от A∞. При s = 0, как отмечалось, точка А совпадает с точкой Aс. Дуга A∞EAc с соответствует изменению s от - ∞ до 0 и, следовательно, работе машины генератором.
Полученная диаграмма позволяет найти для любого тока I1 соответствующий ему cosθ1. Из диаграммы мы можем также получить ряд других величин, характеризующих работу машины.
Проведем через точку А перпендикулярно оси абсцисс отрезок P1 A . Пусть при построении
круговой диаграммы был выбран масштаб для тока СI , A/мм. Тогда CI P1 A I1 cos 1 ; где
|
P1 A |
|
|
|
|
|
|
|
|
|
|
|
измеряется в миллиметрах. Умножив полученный активный ток статора на число фаз m1 и |
||||||||
напряжение U1, получим электрическую мощность статора: |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
m1U1 I1 cos 1 |
m1U1C1 P1 A C p |
P1 A |
, |
(3-179) |
|||
|
|
|
|
|
|
|
|
|
||
где масштаб для мощности, Вт/мм, |
|
|
|
|
||||||
|
|
C p |
m1U1CI . |
(3-180) |
|
|
|
|
|
|

Таким образом, перпендикуляр из любой точки диаграммы тока на ось абсцисс, измеренный в масштабе мощности, равен электрической мощности статора. Поэтому ось абсцисс называется линией электрических мощностей P1.
Из подобия треугольников AcRRк и АсАP'2 следует:
|
|
|
|
|
|
Rк R |
|
|
P2 A Ac |
A |
|
|
|||||
|
|
|
||||||
Ac R |
. |
|||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
Умножив обе части равенства на масштаб мощности, получим:
|
|
|
|
|
|
c 2 r |
1 s |
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
2 |
|
s |
|
|
m1U1C1 P2 A m1U1CI |
Ac |
A |
|
|
|
|
||||
|
zд s |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||
или
|
|
|
|
2 r |
1 |
s |
|
|
C |
|
P A |
m I |
P |
|
|||
|
|
|
|
|||||
|
p |
2 |
1 2 |
2 |
|
s |
2 , |
(3-181) |
так как
U1 |
I 2 |
I 2 |
|
|
|
|
|
|
I |
2 |
|
C |
|
A A |
I |
|
|
||||||
|
|
|
2 |
|
|
|
|||||
|
|
|
|
|
|
||||||
zд.s |
|
c1 |
и |
I c |
|
|
1 . |
||||
|
|
|
|
|
|
|
c |
||||
Следовательно, линия AcA∞ —линия механических мощностей P2 , развиваемых ротором.
Аналогично из подобия треугольников AсRR∞ и AсAРэм следует:
|
|
|
|
2 r2 |
|
|
|
C |
|
P A |
m I |
P |
|
||
|
|
|
|
||||
|
p эм |
1 2 |
|
s |
эм . |
(3-182) |
|
Следовательно, линия АcА∞ — линия электромагнитных мощностей Рэм; в то же время это есть линия электромагнитных вращающих моментов М, так как М равен мощности Рэм, деленной на
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w1 |
2πn1 |
const |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|||
синхронную угловую частоту |
, Дж, |
|||||||||||||||||
|
|
Pэм |
|
C1 |
|
|
|
|
|
|
|
|
|
|
||||
M |
|
|
P |
A |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
w1 |
|
w1 |
эм |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
(3-183) |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
или, кг·м, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
Pэм |
A |
|
CM Pэм A |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
9,81w1 |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
, |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
где масштаб для момента., кг·м/мм, |
|
|
||||||||||||||||
СM |
|
|
60 |
|
|
|
C p |
|
0,973 |
C p |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
9,812πn1 |
|
|
|
|
|
n1 |
. |
(3-184) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Отрезок Pэм P2 , измеренный в масштабе мощности, равен электрическим потерям в обмотке ротора:
С |
|
P P |
|
|
|
P |
|
P |
m I |
|
2 r |
P |
(3-185) |
|||
|
p эм 2 |
|
|
|
эм |
2 |
1 |
2 |
2 |
э2 . |
||||||
Согласно (3-69) скольжение |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
Pэ2 |
|
|
|
Pэм P2 |
|
|
|
|
|
|
|
||
|
|
Pэм |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Pэм A |
. |
(3-186) |
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
При небольших токах I1 (например, при I1 < 0 Aн ) достаточно точное определение s по (3-186) затруднительно, поэтому для определения s применяют особое построение на диаграмме, рассмотренное в § 3-18,б.
При помощи диаграммы можно определить максимальный момент Мм. Для этого нужно параллельно линии моментов АсА∞ провести касательную к окружности и из точки касания Ам —
перпендикуляр к диаметру Ac D до пересечения с линией АcА∞, тогда получим, кг·м,
M м СМ Pэм.м Aм .
Обычно асинхронные двигатели рассчитываются таким образом, чтобы cosθн при номинальной нагрузке был равен максимальному (или близок к максимальному). В этом случае ток
статора I1н 0Aн будет совпадать с касательной к окружности (или будет близок к ней).
Номинальный момент Мн = CM Pэм.н Aн . Кратность максимального момента (способность к перегрузке)
M м |
|
Pэм.м |
Aм |
|
M н |
|
Pэм.н |
Aн . |
|
Методы построения круговой диаграммы по расчетным или опытным данным и определение с ее помощью рабочих кривых двигателя, характеризующих его рабочие свойства, рассматриваются в § 3-18,б.
При построении рассмотренной круговой диаграммы было принято, что параметры
асинхронной машины r1, r2 , x1, x2 , r12, x12 остаются без изменения, а изменяется только скольжение s. Никаких других допущений не делалось. Поэтому представленная на рис. 3-53 диаграмма называется точной круговой диаграммой.
Для обычных случаев, как отмечалось, комплекс С1 можно заменить его модулем с1 и принять, следовательно, γ1 = 0. Тогда построение круговой диаграммы упрощается: ее диаметр расположится на линии, параллельной оси абсцисс; отрезки прямых, определяющие мощности и вращающие моменты, будут перпендикулярны к оси абсцисс. Такая упрощенная круговая диаграмма и используется при исследовании асинхронных машин, если угол γ1 не превышает примерно 2  3°.
3°.
На практике к точной круговой диаграмме приходится обращаться при исследовании: малых машин, имеющих относительно высокое значение r1; машин, работающих при низкой частоте тока [когда индуктивные сопротивления уменьшаются, а активные сопротивления практически остаются неизменными, что приводит согласно (3-173) к возрастанию γ1];
машин, работающих с большим активным сопротивлением, включенным последовательно с обмоткой статора.
3-18. Рабочие характеристики двигателей
а) Определение рабочих характеристик опытным путем.
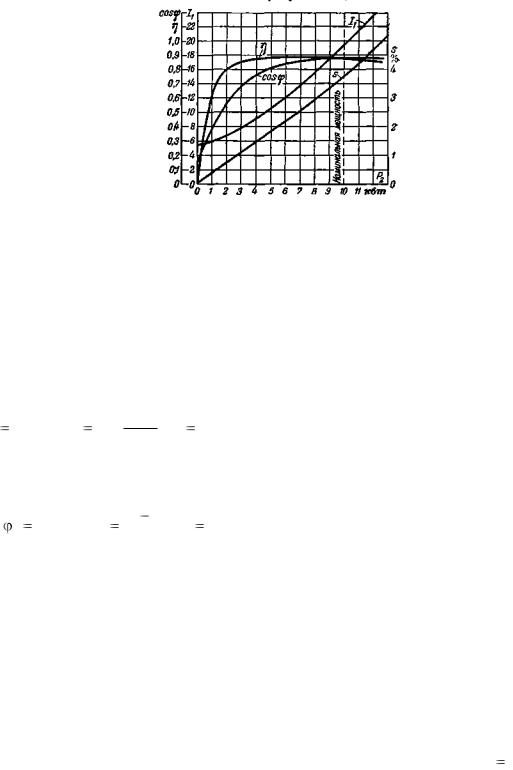
Под рабочими характеристиками или рабочими кривыми асинхронного двигателя обычно понимаются следующие зависимости:
I1, cosθ1, η, s = f(P2) при U1 = const и f = const (рис. 3-54).
Рис. 3-54. Рабочие характеристики двигателе на 10 кВт, 220/380 В, 1500 об/мин.
Рабочие характеристики двигателей небольшой мощности могут быть найдены путем непосредственного измерения тока I1, мощности P1, частоты вращения n2 и момента на валу Мв при различных нагрузках двигателя. Нагрузка двигателя при этом осуществляется с помощью какоголибо тормоза, позволяющего измерить создаваемый им тормозящий момент Мв, кг·м.
При опыте непосредственной нагрузки напряжение U1 и частоту тока f1 устанавливают равными номинальным значениям U1н и f1н. По данным измерений рассчитывается мощность, Вт,
P2 9,81ω2 M в 9,81260πn2 M в 1,02nMв
и коэффициенты:
cos 1 |
P1 |
; s |
n1 |
n2 |
|
η |
P2 |
|
|
m1U1 I1 |
n1 |
; |
P1 . |
||||||
|
|
|
|||||||
Определение рабочих характеристик путем непосредственного измерения указанных величин обычно не дает достаточно точных результатов, так как измерения Mв и п2 практически трудно выполнить с надлежащей точностью. Погрешность при определении P2 дает примерно ту же погрешность при определении η. Поэтому обычно не рекомендуется определять к.п.д. η электрических машин по данным непосредственного измерения Р1 и Р2, если значение η >0,50. Однако в последнее время вследствие усовершенствования тормозов, позволяющих более точно измерить вращающий момент, метод непосредственного определения к.п.д. используется и в том случае, когда примерно значение η  0,70. Значение n2 близко к значению n1, поэтому погрешность, допущенная при измерении n2, сильно скажется на значении s. Скольжение s значительно более
0,70. Значение n2 близко к значению n1, поэтому погрешность, допущенная при измерении n2, сильно скажется на значении s. Скольжение s значительно более
|
s |
f |
2 |
|
|
точно определяется по данным измерения частоты f2 тока ротора — по формуле |
f1 . |
||||
|
|||||
Если производится испытание малых машин (Pн  0,4 кВт), то обычно используется метод непосредственного определения рабочих характеристик.
0,4 кВт), то обычно используется метод непосредственного определения рабочих характеристик.
б) Определение рабочих характеристик по круговой диаграмме.
Рабочие характеристики могут быть определены при помощи круговой диаграммы. Для построения диаграммы должны быть известны параметры машины, которые могут быть найдены расчетным или опытным путем.
Рассмотрим построение диаграммы по опытным данным, которые получают из опытов холостого хода и короткого замыкания.
При опыте холостого хода машина должна работать двигателем вхолостую. Напряжение на ее зажимах устанавливается равным номинальному: U1 = U1н. При этом нужно измерить ток холостого
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos 0 |
|
P0 |
|
||
хода I0 и мощность P0, |
потребляемую двигателем. По данным измерений находят: |
m1U1 I 0 . |
||||||||||||||||||
|
||||||||||||||||||||
Активная |
составляющая |
тока |
холостого |
хода |
I0а |
= I0cosθ0 |
зависит от потерь |
холостого |
хода |
|||||||||||
P |
mI 2 r |
P |
P |
P |
. Практически |
I0 |
Ic. |
Активная |
составляющая Icа, как указывалось, |
|||||||||||
0 |
0 1 |
c1 |
мех |
с.д |
||||||||||||||||
определяется потерями |
m I 2r |
P |
|
|
|
|
|
|
|
|
|
|
|
|||||||
1 |
c 1 |
c1 . |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|||
|
На рис. 3-53 показан вектор |
0 A |
|
|
|
на отрезок |
A A |
|||||||||||||
|
0 |
|
0 . Точка А0 лежит выше точки Ас |
c 0 , |
||||||||||||||||
приблизительно равный в масштабе мощности потерям на трение Pмех и добавочным потерям в |
||||||||||||||||||||
зубцах статора и ротора Pс.д: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Cр Aс A0 |
Pмех |
Pс.д . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
С некоторым приближением можно принять, что точка Ас делит отрезок Aа A0 пополам.
Ток холостого хода I0 асинхронных двигателей определяется главным образом его реактивной составляющей I0р (I0  I0р). Можно считать, что реактивная составляющая I0р идет на создание только основного поля машины, так как поля рассеяния при холостом ходе незначительны. Она может быть определена из расчета магнитной цепи машины. Так как в магнитную цепь входит воздушный зазор между статором и ротором, на который обычно затрачивается наибольшая часть н. с. всей цепи, то I0р имеет относительно большое значение, превышающее в несколько раз I0р трансформаторов. Обычно для нормальных асинхронных двигателей при U1 = U1н ток I0 = (0,25
I0р). Можно считать, что реактивная составляющая I0р идет на создание только основного поля машины, так как поля рассеяния при холостом ходе незначительны. Она может быть определена из расчета магнитной цепи машины. Так как в магнитную цепь входит воздушный зазор между статором и ротором, на который обычно затрачивается наибольшая часть н. с. всей цепи, то I0р имеет относительно большое значение, превышающее в несколько раз I0р трансформаторов. Обычно для нормальных асинхронных двигателей при U1 = U1н ток I0 = (0,25  0,40)I1н. Он тем больше, чем больше полюсов имеет машина и чем меньше ее мощность.
0,40)I1н. Он тем больше, чем больше полюсов имеет машина и чем меньше ее мощность.
У тихоходных двигателей (при 2p > 10) и специальных двигателей, работающих с повышенным насыщением, ток холостого хода часто получается больше 0,4I1н; cos θ0 = 0,15  0,05 (тем больше, чем меньше мощность машины и ее число полюсов).
0,05 (тем больше, чем меньше мощность машины и ее число полюсов).
При опыте короткого замыкания машина должна быть неподвижной при замкнутой накоротко обмотке ротора. Напряжение U1к на зажимах статора устанавливаем таким образом, чтобы
ток I1к I1н |
при этом измеряем U1к, I1к |
и P1к и затем определяем: |
||||||||||||
|
U1н |
|
|
|
P1к |
|
|
|
|
P1к |
||||
I1к |
I1к |
|
|
|
cos |
|
|
|
|
|
rк |
|
|
|
U |
|
; |
1к m U |
I |
|
; |
m I |
2 |
|
|||||
|
|
|
1к |
|
|
1 1к |
|
1к |
1 |
1к |
||||
(здесь приближенно принято с1 = 1).
Для короткозамкнутых двигателей с глубиной роторного паза свыше 2  2,5 см, при двойной клетке на роторе и для двигателей с контактными кольцами, имеющих на роторе двухслойную стержневую обмотку при глубине роторных пазов свыше 3 см, опыт короткого замыкания следует проводить при пониженной частоте питающего тока (f1 = 5
2,5 см, при двойной клетке на роторе и для двигателей с контактными кольцами, имеющих на роторе двухслойную стержневую обмотку при глубине роторных пазов свыше 3 см, опыт короткого замыкания следует проводить при пониженной частоте питающего тока (f1 = 5  8 Гц). При этом можно с некоторым приближением считать, что вытеснения тока в проводниках обмотки ротора (§ 3-19,в) не будет и что
8 Гц). При этом можно с некоторым приближением считать, что вытеснения тока в проводниках обмотки ротора (§ 3-19,в) не будет и что
|
|
|
|
|
|
|
|
f1н |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
его параметры |
|
|
1 |
|
|
и |
|
|
r2 |
|
соответствуют тем же параметрам при изменении s от -sк до +sк |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
приблизительно в пределах |
|
(0,05 |
|
|
0,16). |
|
|
|
|
|
||||||||||||||||||||||||||
По данным измерений определяем: |
|
|
|
|
|
|||||||||||||||||||||||||||||||
rк |
|
P1к |
|
|
|
z |
|
|
U1к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
m I |
|
2 |
|
к |
|
|
I |
|
|
|
|
|
x |
|
|
|
z |
2 |
|
r 2 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
1 |
1к ; |
|
|
|
|
|
|
1к |
|
|
|
к |
|
|
|
|
к |
|
|
к |
|
|
|
|
|
|||||||||
и затем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
к |
|
f1н |
|
x |
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
1к |
|
U1н |
1к |
|
rк |
|||||||||
|
|
z |
|
|
|
|
|
x |
2 |
|
r |
2 |
|
|||||||||||||||||||||||
|
f |
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
z |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
; cos |
|
|
|
|||||||||
|
|
|
|
1 |
|
|
|
|
к |
|
|
|
|
|
к |
|
|
к |
|
|
|
|
|
к |
|
|
к |
|||||||||
(здесь также принято с1 = 1). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I1к |
|
|
4 |
|
|
6; cos |
|
|
|
|
|
Для нормальных двигателей I1н |
|
|
|
|
1к 0,08 0,25 . |
|||||||||||||||||||||||||||||||
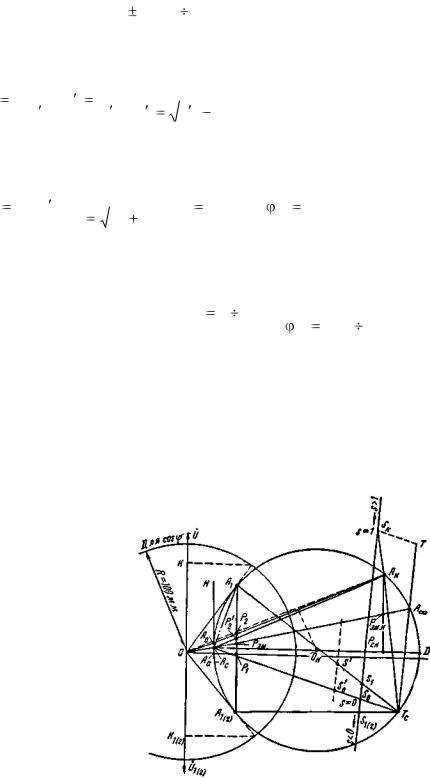
По найденным значениям I0, cosθ0, I1к и cosθк можно построить упрощенную круговую диаграмму. При этом будем считать γ1 = 0.
Проведем часть окружности радиусом 100 мм (рис. 3-55), которая позволит находить cosθ1. Далее выберем масштаб тока СI (A/мм) (его рекомендуется выбирать таким образом, чтобы I1к/СI = 200  250 мм).
250 мм).
Рис. 3-55. Построение круговой диаграммы асинхронной машины.