

Асинхронные машины
.pdfПри g = 0 внешнее сопротивление Z = 0, чему соответствует непосредственное подключение
фазы |
b |
к |
|
сети. |
Согласно (3-227) |
|
|
в |
этом |
случае |
модули |
|
|
|
|
|
между |
собой |
||||||||||||||||||||||||||||||||
|
|
|
U1 и |
U2 равны |
||||||||||||||||||||||||||||||||||||||||||||||
(U1 |
U2 |
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 при k = 1) и, следовательно, моменты от прямого и обратного полей одинаковы и Мнач |
||||||||||||||||||||||||||||||||||||||||||||||||
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При g = |
|
, Z = |
|
|
фаза b разомкнута и машина превращается в однофазную, не создающую |
||||||||||||||||||||||||||||||||||||||||||||
никакого момента в начале пуска. Для этого случая U1 =U2 = U/2. |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
Найдем теперь, при каком значении g момент Мнач |
будет максимальным. |
Для этого надо |
|||||||||||||||||||||||||||||||||||||||||||||||
определить максимум функции |
U 2 |
U |
2 |
|
|
|
|
|
f (g) |
, |
так как Мнач пропорционален |
U 2 |
U 2 |
|
||||||||||||||||||||||||||||||||||||
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 . Преобразим |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
g |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U 2 |
U U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zк |
|
|
|
|
|
|
|
|
|
|
||||||
уравнения |
(3-227), |
подставляя |
|
|
в |
|
них |
|
|
|
и |
|
z |
к |
и учитывая, |
что |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
1 1к и |
||||||||||||||||||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U2 |
U2U2к |
(U1к |
|
U2к |
– векторы, сопряженные с U1 |
и U2 ): |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
k 2 |
|
g 2 |
|
2g |
|
cos |
|
|
|
1 |
|
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
U 2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
U 2 |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 |
|
4 |
|
|
|
|
|
k 2 |
|
|
|
2g cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
1 |
k 2 |
|
|
2g |
|
cos |
|
|
|
|
1 |
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
U 2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
U 2 |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
2 |
|
4 |
|
|
|
|
|
k 2 |
|
|
|
2g cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 2 |
|
|
|
|
|
|
|
|
(3-228) |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Отсюда получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
sin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (g) |
|
|
|
U1 |
U |
2 |
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
k 2 |
|
2g cos |
|
|
|
|
|
|
g 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 2 |
|
|
(3-229) |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
[ f (g)] |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U12 |
U22 |
|
|
|
|
|
|
|
|
|
|
|
Согласно условию |
|
|
|
|
g |
|
|
|
|
|
величина |
будет максимальной при g = k2, т. е. при z = |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
k2zк.
Таким образом, мы нашли, что для любой машины при ее пуске в ход с использованием вспомогательной фазы максимальный момент Mнач.м получается в том случае, если абсолютное значение активного, индуктивного или емкостного сопротивления, включаемого во вспомогательную фазу, для данного k равно k2zк.
Обозначим через Mg начальный вращающий момент, развиваемый машиной, если к ней
|
|
|
|
|
|
|
|
|
|
|
|
|
|
подводится симметричная двухфазная система напряжений U; |
jU или если |
k 1, U; |
jkU; тогда |
||||||||||
при g = k2 будем иметь: |
|
|
|
|
|
|
|
|
|
|
|
||
|
U12 U 22 |
|
sin |
|
M g |
|
|
|
|
|
|
||
M нач.м |
M g |
|
M g |
|
|
|
|
tg |
|
. |
|
|
|
U 2 |
2k(1 cos ) |
|
2k |
2 |
(3-230) |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mнач.м |
зависит от |
z к . Очевидно, |
при |
z |
|
к момент Мнач = 0. |
В обычных случаях |
||||||
близкие к этому условия получились бы при включении во вспомогательную фазу реактивной

катушки. Однако для очень малых двигателей при cos к > 0,6÷0,7 она может найти себе применение, если требуется небольшой Mнач.
При активном пусковом сопротивлении |
|
z =0. В этом случае при g = k2 получим: |
|
|
|
||||||||||||||||
M |
|
M |
|
sin( |
к |
) |
|
|
M |
|
sin |
к |
|
M g |
tg |
к |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
нач.м |
g |
2k[1 cos( |
|
к )] |
g |
2k(1 |
cos к ) |
|
2k |
2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
При k = 1 в идеальном случае, когда θк = 90°, мы получили бы Mнач м = 0,5Mg; но в обычных |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
wb k0b |
|
случаях при k = 1 Мнач м |
(0,3 |
|
0,4) Mg. Можно увеличить Мнач м за счет уменьшения |
wa k0a . |
|||||||||||||||||
|
|
||||||||||||||||||||
Однако при этом может получиться чрезмерный ток Ib во вспомогательной фазе (следовательно, и
|
|
|
|
|
|
I |
I a |
Ib |
|
|
2 |
начальный пусковой ток из сети |
|
|
|
|
, что видно из выражения для Ib |
при g = k , которое |
|||||
выводится из приведенных ранее уравнений): |
|
|
|||||||||
Ib |
U |
1 |
I a |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
zк |
|
2k 2 (1 cos к ) |
2k 2 (1 |
cos |
к ) . |
|
|
||||
Обычно пусковое сопротивление R  O,5zк. Пуск через активное сопротивление на практике применяется довольно часто. При этом во многих случаях двигатели имеют вспомогательную обмотку, выполненную из провода повышенного сопротивления (тонкий медный провод, стальной или латунный провод), что исключает необходимость включать в нее внешнее сопротивление R.
O,5zк. Пуск через активное сопротивление на практике применяется довольно часто. При этом во многих случаях двигатели имеют вспомогательную обмотку, выполненную из провода повышенного сопротивления (тонкий медный провод, стальной или латунный провод), что исключает необходимость включать в нее внешнее сопротивление R.
π
При конденсаторном пуске |
z |
2 (рис. 3-93,в). Если по (3-230) рассчитать максимальный |
|
начальный момент для обычных значений θк, то можно видеть, что его значение получается очень большим: например, для cos θк = 0,3 (θк = 72,5°) при k = 1 он будет равен:
M нач.м |
M g |
sin( 162,5o ) |
|
M g |
|
0,3 |
3,33M g |
|
2[1 cos(-162,5)] |
2(1 |
0,955) |
||||||
|
|
|
. |
|||||
|
|
|
|
|
|
|
||
Однако такой большой момент получается при чрезмерном напряжении Uь на вспомогательной фазе. Действительно, согласно (3-218) и (3-227) при k = 1 и, следовательно, g = 1 имеем:
U b |
j(U1 |
U |
2 ) |
|
|
|
U |
||||
|
|
|
|
|
|
|
|
|
1 |
e jα |
|
или абсолютное значение (с учетом равенства Ub 
 UbUbк )
UbUbк )
U b |
|
U |
|||
|
|
|
|
||
|
|
|
|
||
2(1 cosα) , |
|||||
|
|
||||
что для приведенного примера дает:
U b |
|
|
U |
|
3,33U |
|
|
|
|
|
|||
|
|
|
|
|||
2(1 |
0,955) |
|||||
|
|
. |
||||
|
|
|
|
|||
Напряжение Ub имеет недопустимое значение. Оно создало бы слишком сильное насыщение стальных участков магнитной цепи машины и очень большой ток в обмотке b, который привел бы к ее повреждению. Это следует иметь в виду при выборе емкости пускового конденсатора.
Обычно при конденсаторном пуске стремятся получить Мнач = Мg. Для этого надо иметь симметричную двухфазную систему напряжений на зажимах обмоток а и b (см. следующий пункт
3.22.4).
3-22.4. Однофазные асинхронные двигатели. Конденсаторные двигатели
Наличие конденсатора во вспомогательной обмотке не только улучшает пусковые характеристики однофазного двигателя, но может также значительно улучшить его рабочие характеристики (к.п.д. и cosθ) и повысить, его использование.
Однофазные двигатели, работающие с постоянно включенным во вспомогательную обмотку конденсатором, называются конденсаторными. Конденсатор в этом случае называется рабочим. Если вспомогательная обмотка вместе с конденсатором используется только во время пуска двигателя, то его называют двигателем с конденсаторным пуском. В последующем рассматриваются вопросы, касающиеся выбора емкостей пускового и рабочего конденсаторов.
Напишем уравнения напряжений конденсаторного двигателя (см. рис. 3-93,в):
U |
U a ; |
U |
Ub |
|
|
Ib Z |
|
Ub |
jIb xC . |
(3-231) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Используя (3-218) и (3-219), получим: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
U |
|
jk(U1 |
|
U |
2 ) |
1 |
(I1 |
I 2 )xC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
. |
|
(3-232) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
U |
|
U |
|
|
U1 |
I1Z s1 |
|
|
Если теперь в уравнение (3-232) подставить известные равенства |
|
|
1 |
|
2 |
; |
|
|
и |
|||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U 2 |
I 2 Z s 2 |
, то оно принимает следующий вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
0 I1[Zs1 (1 jk) |
|
xC |
] |
I 2 |
[Zs 2 (1 jk) |
|
xC |
] |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
k . |
(3-233) |
|
|
|
|
|
|
|
|
|
||
|
Для получения кругового вращающегося поля необходимо, чтобы напряжение, а, |
||||||||||||||||||||||||||
следовательно, и ток обратной |
последовательности |
были равны нулю. Учитывая |
|
это |
условие |
||||||||||||||||||||||
( I2 |
0 ), из (3-233) имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Z s1 (1 |
jk) |
|
xC |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
k |
. |
|
(3-234 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Комплексное выражение (3-234) будет равно нулю только в том случае, если будут равны нулю его мнимая и вещественная части каждая отдельно. Поэтому при замене Zsl = rsl + jxsl получим:
xs1 krs1 ;
x |
|
kr |
k 2 x |
|
x (1 k 2 ) |
. |
(3-235) |
|
C |
s1 |
|
s1 |
s1 |
||
|
|
|
|
Приведенное равенство показывает, что k должно равняться xsl/rs1 = tgθ1 чтобы получилось круговое вращающееся поле. Но при. этом емкостное сопротивление хC не может выбираться произвольно, так как оно должно удовлетворять равенству
x |
|
x |
|
(1 k |
2 |
) |
x |
|
(1 tg |
2 |
|
) |
xs1 |
|
C |
s1 |
|
s1 |
|
1 |
cos2 |
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 . |
|
Следовательно, оба равенства (3-235) должны удовлетворяться одновременно.
Чтобы пояснить указанные условия, обратимся к примеру. Допустим, что круговое вращающееся поле должно получиться при пуске двигателя (при s = 1), имеющего cos θк = 0,4. Тогда
k |
xк |
tg к |
2,3 |
|
|
|
|
rк |
|
|
|
|
|||
|
|
; следовательно, эффективное число витков фазы b должно быть |
в 2,3 раза |
||||
|
|
|
|||||
|
|
|
|
xC |
xк |
|
6,2xк |
|
|
|
|
cos2 |
|||
больше, чем фазы а, но круговое вращающееся поле получится только при |
|
. |
|||||
|
к |
||||||
|
|
|
|
|
|
||
Если необходимо определить k и хC для получения кругового вращающегося поля при работе того же двигателя с некоторой нагрузкой (например, при s = 0,06), то сначала надо найти cosθ1, соответствующий этой нагрузке (расчетом или по круговой диаграмме двухфазного симметричного
двигателя). Примем cosθ1, = 0,75 при s = 0,06. Тогда k = xs1/rs1 = = tgθ1 = 0,88 и хC = xs1/cos2θ1 = l,78xsl,
т. е wbkob должно составлять 88% wakoa, а сопротивление конденсатора должно быть в 1,78 раза больше индуктивного сопротивления двигателя при s = 0,06.
Следовательно, если выбираются значения k и xC для создания наиболее благоприятных условий при работе двигателя с нагрузкой, то при пуске уже не будет получаться круговое поле и Mнач будет относительно небольшим (рис 3-95,б).
Иногда для конденсаторного двигателя выбираются промежуточные значения k и xC, чтобы иметь удовлетворительные пусковые и рабочие характеристики.
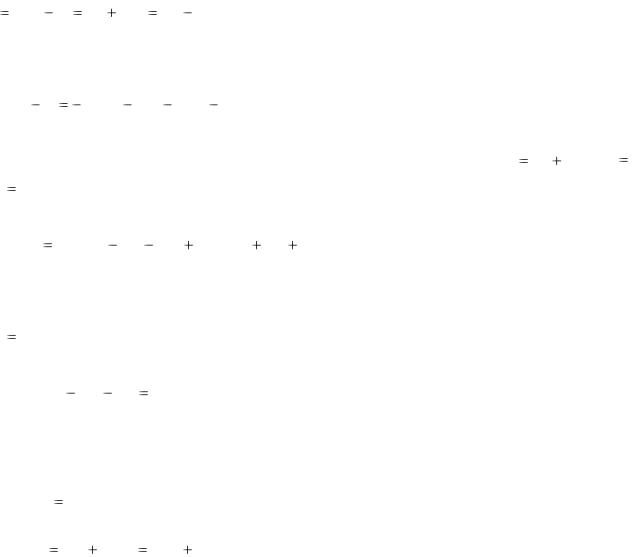
Рис. 3-95. Схемы включения однофазного двигателя с конденсатором во вспомогательной обмотке. а — двигатель с пусковым конденсатором; б — двигатель с рабочим конденсатором; в — двигатель с двумя конденсаторами; механические характеристики:1 — двигателя без вспомогательной обмотки; 2 — двигателя с конденсаторным пуском; 3 — двигателя с рабочим конденсатором; 4 — двигателя с двумя конденсаторами (пунктирная прямая соответствует номинальному моменту Мн).
Можно получить значительное улучшение и пусковых и рабочих характеристик при применении двух конденсаторов — пускового, отключаемого по достижении некоторой частоты (обычно 70 — 80% номинальной), и рабочего, постоянно включенного в фазу b (рис. 3-95,в).
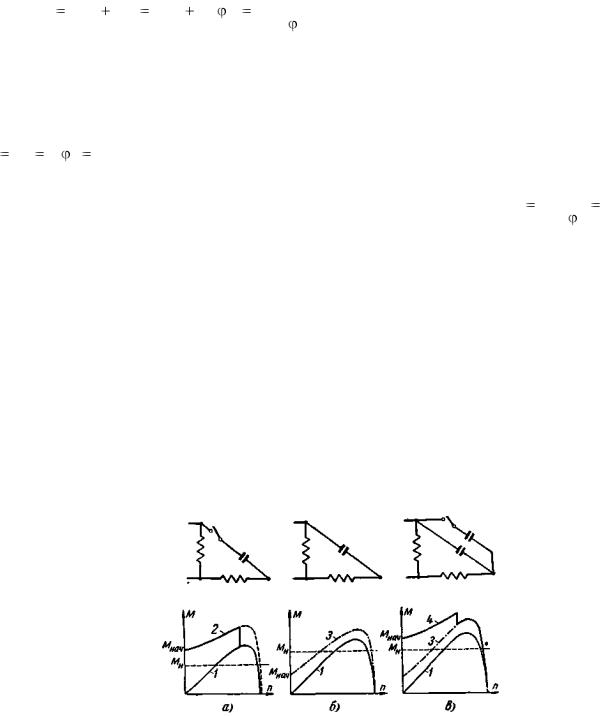
Для решения тех же задач можно обратиться к диаграмме напряжений и токов конденсаторного двигателя, работающего с круговым полем (рис 3-96).
Рис. 3-96. Диаграмма напряжений и токов конденсаторного двигателя при работе с круговым вращающимся полем.
Из диаграммы имеем:
U C |
U |
|
cos 1 ; |
|
|
|
(3-236) |
коэффициент мощности (для тока сети I)
cos |
sin 2 1 ; |
(3-237) |
отношение эффективных чисел витков
k |
wb k0b |
Ub |
|
I a |
tg 1 |
|
|
|
|
|
|
||
wa k0a |
U a |
|
Ib |
|||
|
|
(3-238) |
||||
|
|
|
|
|
|
|
и емкость конденсатора
|
I |
a |
|
cos2 |
|
|
C |
|
|
1 |
|
|
|
2πf1U |
|
sin 1 . |
(3-239) |
|||
|
|
|||||
Последнее равенство получается из (3-236) и (3-238), так как
U C |
I b |
1 |
I a |
1 |
|
|
|
|
|
||||
2πf1C |
2πf1Ctg 1 . |
|||||
|
|
|
||||
Угол θ1 — угол между током и напряжением симметричного двухфазного двигателя, имеющего при данной нагрузке круговое поле.
Из (3-238) следует, что при изменении нагрузки должны изменяться и k и С, чтобы вращающееся поле оставалось круговым. Практически это не может быть выполнено. Поэтому конденсаторный двигатель обычно рассчитывается таким образом, чтобы получалась симметричная система напряжений или при номинальной нагрузке Рн, или при 0.75Рн.
Коэффициент мощности cosθ1 двухфазных двигателей при Рн =100  600 Вт для указанных нагрузок составляет примерно: cosθ1
600 Вт для указанных нагрузок составляет примерно: cosθ1  0,62 — 0,73. В этом случае для конденсаторного двигателя будем иметь:
0,62 — 0,73. В этом случае для конденсаторного двигателя будем иметь:
UC |
(1,4 1,6)U |
; |
cos |
1 |
; k 0,9 1,2. |
|
|
|
|
Так как при симметрии напряжений обе обмотки потребляют одинаковую мощность, то ток в главной фазе
I a |
P |
|
|
|
|
||
2Uηcos 1 |
(3-240) |
||
|
|||
|
|
и во вспомогательной фазе Ib = Ia/k.
Если подставить (3-240) в (3-239), то найдем емкость конденсатора в зависимости от мощности и напряжения двигателя:
C |
|
P cos |
1 |
|
|
|
|
|
|
2 2πf U 2 |
ηsin |
1 . |
(3-239а) |
||||
|
|
|||||||
|
1 |
|
||||||
Если сюда подставить значения cosθ1, и обычные значения к. п. д. для указанных двигателей |
||||||||
(η 0,62 |
|
0,73), то при f1 = 50 Гц ѐмкость, мкФ, |
||||||
C |
(2100 2300) |
P |
|
|
||||
U 2 , |
(3-239б) |
|||||||
|
|
|
|
|||||
где Р — в ваттах и U — в вольтах.
Начальный пусковой момент конденсаторного двигателя с емкостью, рассчитанной по 3- 239б), составляет в обычных случаях 0,2 — 0,4 номинального момента Мн.
3-22.5. Однофазные двигатели с экранированными полюсами
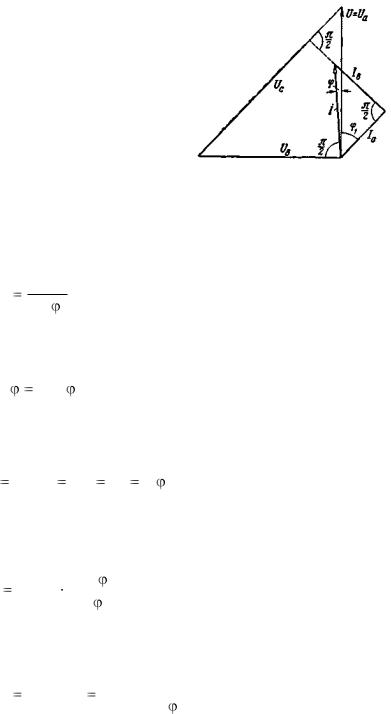
Однофазные двигатели с экранированными полюсами получили в последние годы широкое распространение. Они обычно выполняются на малые мощности (0,5 — 30 Вт) и применяются в тех случаях, где не требуется большой начальный вращающий момент.
По устройству они являются одними из наиболее простых электродвигателей (рис. 3-97): их статорная (главная) обмотка состоит из катушек, надетых на полюсы; ротор имеет короткозамкнутую обмотку в виде клетки.
Рис. 3-97. Однофазный двигатель с экранированными полюсами.
1 и 2 — обмотки статора и ротора; K — короткозамкнутый виток; Ш — магнитный шунт.
Для создания пускового момента на статоре помещается вспомогательная обмотка в виде короткозамкнутых витков, охватывающих части полюсов.
Магнитные потоки под этими частями оказываются сдвинутыми по фазе (во времени) и в пространстве относительно потоков под основными частями полюсов, вследствие чего под полюсами возникают бегущие магнитные поля, которые, взаимодействуя с наведенными ими в обмотке ротора токами, создают пусковой вращающий момент.
Направление вращения двигателя указано на рис. 3-97. Оно будет таким же, как направление вращения поля в зазоре от основной части полюса к его экранированной части.
Двигатели имеют относительно низкие значения Мнач, Мм и к.п.д. Некоторое улучшение их пусковых и рабочих характеристик удается получить путем применения магнитных шунтов, которые выполняются из стальных пластинок и помещаются между полюсными наконечниками (рис. 3-97).
3-23. Асинхронные исполнительные двигатели
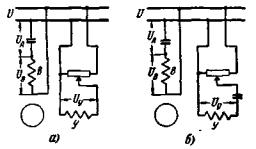
Для осуществления автоматического управления, регулирования или контроля во многих случаях требуется преобразование «электрического сигнала» в механическое вращение. При этом применяются исполнительные двигатели, в качестве которых часто используются асинхронные двигатели с двумя обмотками на статоре и короткозамкнутым ротором. Обмотки в пазах статора размещаются так же, как в однофазном двигателе, имеющем главную и вспомогательную фазы.
Обычные схемы включения асинхронных исполнительных двигателей приведены на рис. 3-
98.
Рис. 3-98. Схемы включения асинхронных исполнительных двигателей.
Здесь одна из фаз статора называется обмоткой возбуждения (В), а другая фаза — обмоткой управления (У). Такие схемы позволяют пускать в ход и останавливать двигатель и регулировать его частоту вращения путем изменения напряжения UУ на обмотке управления; при этом обмотка возбуждения остается приключенной к сети.
В отличие от обычных асинхронных двигателей к исполнительным асинхронным двигателям предъявляется ряд особых требований:
1.отсутствие «самохода» (вращения двигателя после снятия сигнала управления);
2.изменение частоты вращения двигателя в широких пределах при изменении напряжения управления UУ по величине и фазе;
3.устойчивость работы при всех частотах вращения;
4.большой начальный пусковой момент;
5.линейность регулировочных и механических характеристик;
6.малая мощность управления;
7.быстродействие.
Под самоходом двигателя понимается его вращение после снятия сигнала (напряжения) с обмотки управления. Такого вращения (самохода) не должно быть. Двигатель должен быстро останавливаться после отключения обмотки управления. В противном случае он перестает быть
управляемым. Для устранения самохода двигателя необходимо, чтобы обмотка его ротора имела большое активное сопротивление.
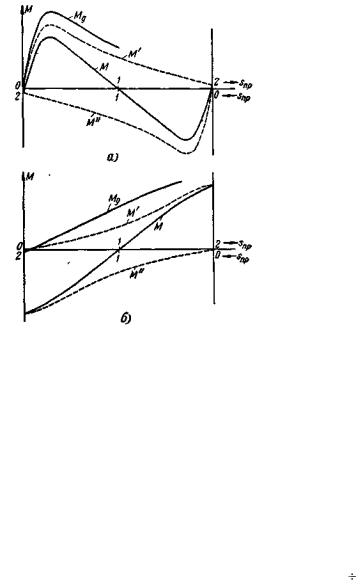
Обратимся к рис. 3-99, где показаны кривые моментов однофазного двигателя (включена только одна обмотка В): от прямого поля М', от обратного поля М" и результирующего М; здесь же показана кривая момента Mg двухфазного двигателя (включены обе обмотки В и У).
Рис. 3-99. Кривые моментов двигателя при различных активных сопротивлениях роторной обмотки. а — при малом сопротивлении; б — при большом сопротивлении.
Из рис. 3-99,а следует, что при отключении обмотки У работа двигателя переходит с кривой Mg на кривую М и двигатель будет продолжать вращаться в направлении вращения прямого поля, если момент М равен тормозящему моменту на его валу. Следовательно, в этом случае имеем самоход двигателя. Кривые тех же моментов двигателя, обмотка ротора которого имеет большое активное сопротивление, показаны на рис. 3-99,б. Из этого рисунка следует, что здесь самохода не будет, так как при отключении обмотки У работа двигателя переходит с кривой Mg (при скольжении ротора относительно прямого поля sпр < l) на кривую М и двигатель быстро тормозится.
Активное сопротивление роторной обмотки выбирается таким образом, чтобы критическое скольжение двигателя в однофазном режиме было больше единицы; обычно sк = 2 4.
Большое сопротивление обмотки ротора исполнительного двигателя в то же время обеспечивает его устойчивую работу при широких пределах изменения напряжения на обмотке управления.
Линейность регулировочных характеристик [п = f(Uу) при Mg = const] и механических характеристик [n = f(Mg) при Uу = const] также в значительной степени обеспечивается при большом активном сопротивлении обмотки ротора; при этом под линейностью характеристик здесь понимается их приближение к пропорциональным зависимостям.
Из схем включения асинхронных исполнительных двигателей следует предпочесть схему на рис. 3-98,б, так как при этой схеме вследствие компенсации индуктивного сопротивления обмотки У емкостью заметно снижается мощность управления и в то же время возрастает начальный пусковой момент.
Быстродействие двигателя будет определяться практически только моментом инерции его вращающихся частей, так как электромагнитные процессы здесь затухают весьма быстро из-за
относительно больших активных сопротивлений его обмоток. Наибольшее быстродействие имеет двигатель с немагнитным полым ротором.
Асинхронный исполнительный двигатель с немагнитным полым ротором наиболее часто применяется как исполнительный двигатель переменного тока в различных схемах автоматических устройств. Мощность его колеблется от десятых долей ватта до нескольких сотен ватт при частоте вращения от 1 500 до 30 000 об/мин.
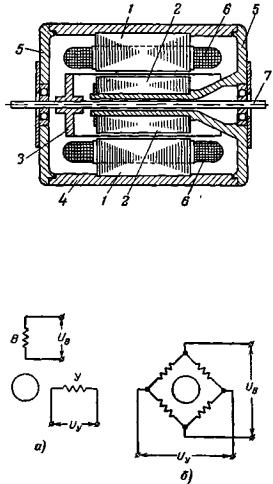
Конструкция двигателя представлена на рис. 3-100, и схемы включения его обмоток — на рис. 3-101.
Рис. 3-100. Двигатель с немагнитным полым ротором.
1 — внешний статор; 2 — внутренний статор; 3 — полый ротор; 4 — корпус; 5 — подшипниковые щиты; 6 — обмотки; 7 — вал.
Рис. 3-101. Схемы включения обмоток статора. а — раздельная; б — мостовая.
Внешний статор 1 собирается из тонких лакированных листов электротехнической стали толщиной 0,2  0,5 мм (при частоте тока соответственно 500 — 50 Гц). В пазах статора помещаются обмотки 6 — возбуждения и управления. Они могут быть выполнены или в виде двух отдельных обмоток, изолированных одна от другой, или в виде обмоток, соединенных по мостовой схеме (рис. 3-101). Последняя схема применяется сравнительно редко, несмотря на то, что электрические потери здесь будут меньше, чем при двух раздельных обмотках. К недостаткам ее следует отнести электрическую связь между цепями возбуждения и управления и увеличенное число проводников для обмоток из-за наличия параллельных ветвей.
0,5 мм (при частоте тока соответственно 500 — 50 Гц). В пазах статора помещаются обмотки 6 — возбуждения и управления. Они могут быть выполнены или в виде двух отдельных обмоток, изолированных одна от другой, или в виде обмоток, соединенных по мостовой схеме (рис. 3-101). Последняя схема применяется сравнительно редко, несмотря на то, что электрические потери здесь будут меньше, чем при двух раздельных обмотках. К недостаткам ее следует отнести электрическую связь между цепями возбуждения и управления и увеличенное число проводников для обмоток из-за наличия параллельных ветвей.
Внутренний статор 2 также собирается из лакированных листов электротехнической стали и служит для уменьшения магнитного сопротивления главному потоку, проходящему через зазор. Он насаживается на цилиндрический выступ щита.
Полый ротор 3 представляет собой тонкостенный стакан, выполняемый обычно из алюминиевого сплава. Дно стакана жестко укрепляется на валу 7. Толщина его стенки колеблется от
0,2 до 1 мм. Такой ротор имеет очень небольшой момент инерции, что во многих случаях и требуется от исполнительного двигателя.
Зазором в двигателе следует считать зазор между внешним и внутренним статорами. Он относительно велик: 0,5 — 1,5 мм. Вследствие этого возрастают намагничивающие токи обмоток, что приводит к увеличению электрических потерь в них. Кроме того, большие электрические потери возникают в роторе. Поэтому к.п.д. рассматриваемого двигателя имеет низкие значения. Из-за больших потерь приходится увеличивать размеры двигателя, чтобы получились достаточные поверхности охлаждения.
Вращающий момент двигателя создается в результате взаимодействия вращающегося поля и вихревых токов, наведенных им в цилиндрической части ротора. С некоторым приближением можно контуры вихревых токов заменить эквивалентной клеткой. Активное сопротивление r2 такой клетки получается большим, тогда как ее индуктивное сопротивление х2 невелико: х2  (0,05
(0,05  0,1)r2. При этих условиях в большой степени удовлетворяются указанные требования, предъявляемые к исполнительному двигателю.
0,1)r2. При этих условиях в большой степени удовлетворяются указанные требования, предъявляемые к исполнительному двигателю.
В качестве исполнительного двигателя применяется также асинхронный двигатель с ферромагнитным полым ротором. Такой ротор выполняется в виде полого цилиндра из стали при толщине его стенки от 0,5 до 3 мм. Здесь внутренний статор не требуется, так как поток будет проходить по стенкам цилиндра. На торцах ротора укрепляются диски. Сквозь центральные отверстия дисков проходит жестко связанный с ними вал. Следовательно, конструкция получается более простой, чем в предыдущем случае.
Выполнение его обмоток статора и схемы их включения такие же, как у двигателя с немагнитным полым ротором (рис. 3-98).
Воздушный зазор между статором и ротором в рассматриваемом двигателе берется небольшой (0,2 — 0,3 мм); однако намагничивающие токи его обмоток почти такие же, как у двигателей с немагнитным полым ротором. Объясняется это тем, что магнитная проводимость ферромагнитного полого ротора вследствие малой его толщины незначительна.
Активное сопротивление r2 такого ротора велико, так как удельное сопротивление стали значительно больше, чем меди и алюминия, и, кроме того, здесь резко сказывается эффект вытеснения тока к внешней цилиндрической поверхности ротора, особенно при большой частоте f2 = sf1.
С целью уменьшения r2 иногда производится омеднение ротора: гальваническим путем внешняя цилиндрическая поверхность ротора покрывается слоем меди толщиной 0,05 — 0,1 мм, а торцовые поверхности — слоем меди толщиной до 1 мм. Однако при этом возрастает зазор (от статора до стальной поверхности ротора). Поэтому в ряде случаев ограничиваются омеднением только торцовых поверхностей ротора.
По быстродействию двигатель уступает двигателю с немагнитным полым ротором.
Находит себе применение в качестве исполнительного двигателя и короткозамкнутый двигатель с беличьей клеткой на роторе, имеющей большое активное сопротивление. Его обмотки статора включаются также по схемам, приведенным на рис. 3-98.
Следует еще рассмотреть асинхронный двигатель с массивным ферромагнитным ротором, который применяется в качестве исполнительного, когда приходится приводить во вращение тяжелые маховые массы и когда, следовательно, собственный момент инерции двигателя имеет относительно малое значение. Характеристики этого двигателя несколько лучше, чем у двигателя с ферромагнитным полым ротором. Здесь также иногда применяется омеднение ротора.