

Описание лабораторной установки
В процессе выполнения лабораторной работы необходимо разработать программу для управления заданным объектом (в соответствии с вариантом). Перевод объекта из одного состояния в другое осуществляется с помощью электропривода, вращающегося в одну или другую сторону. Изменение вращения двухфазного асинхронного двигателя выполняется с помощью подключения ёмкости последовательно с одной из обмоток (см. рис. 12).
Для того чтобы электродвигатель не вышел из строя при остановке объекта в конечном положении, в цепи управления вводят дискретные датчики – путевые выключатели SQ1, SQ2, которые разрывают цепи управления при достижении конечного положения.
При построении нижнего уровня АСУ ТП, сигналы с путевых выключателей подключаются к дискретным входам контроллера и позволяют контролировать положение объекта.
Включение магнитного пускателя KM1 приводит к вращению двигателя в одну сторону, например, на открытие. Магнитный пускатель KM2 включает вращение двигателя в другую, на закрытие. Электрическая схема управления электроприводом включает в себя систему блокировки одновременного включения двигателя на вращение в разные стороны.
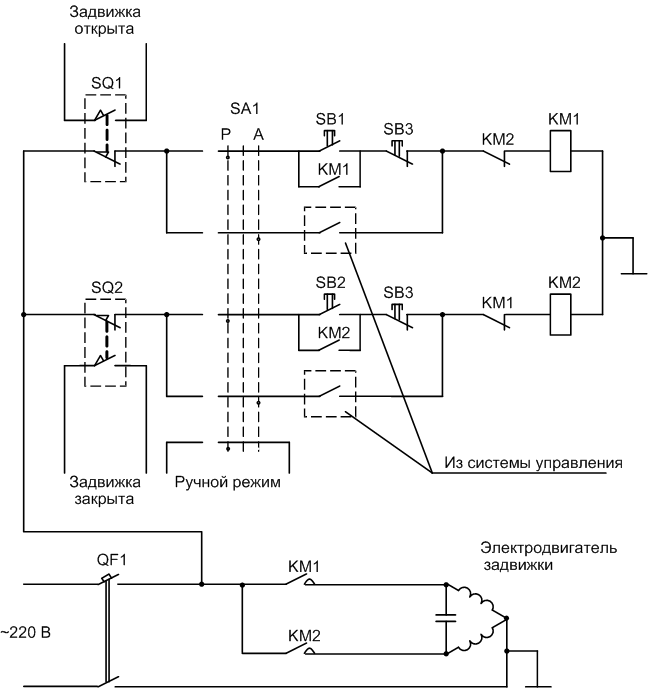
Рис. 12. Принципиальная схема управления электроприводом:QF1 – автоматический выключатель;KM1,KM2 – магнитный пускатель;SQ1,SQ2 – путевой выключатель;KK1 – реле тепловое;SA1 – переключатель пакетный;SB1,SB2,SB3 – кнопочный пост управления
Электрической схемой лабораторного стенда предусмотрено два режима управления двигателем: по месту, с помощью кнопочного пульта SB1 – SB3 (переключатель режима SA1 в положении «Р») и дистанционно, с помощью контроллера (переключатель режима SA1 в положении «А»).
В качестве магнитных пускателей KM1 и RM2 в лабораторной установке выступает интеллектуальное реле ZELIO (Schneider Electric), которое по сигналам на дискретных входах управляет коммутацией выходных реле, рассчитанных на токи достаточно большой мощности. Дистанционное управление электроприводом заслонки осуществляется с помощью промышленного контроллера Momentum (Schneider Electric).
Контроллер лабораторной установки состоит из модуля центрального процессора марки 171 ССС 980 30-IEC, и корзины на 16 дискретных входов и 16 дискретных выходов марки170 ADM 350 10.
Подключение к контроллеру осуществляется по сети EthernetпоIP-адресу192.168.5.225. Пространство ввода-вывода контроллера должно быть сконфигурировано таким образом, чтобы дискретные входы и выходы его отображались на адреса%100001–%100016и%000001–%000016соответственно. Тогда дискретные датчики и исполнительные механизмы, подключенные к его входам и выходам, будут располагаться на установке следующим образом (рис. 13). Обратите внимание, что переключатель «Ручн/Дист» формирует «1» на входе ПЛК в положении «Р».
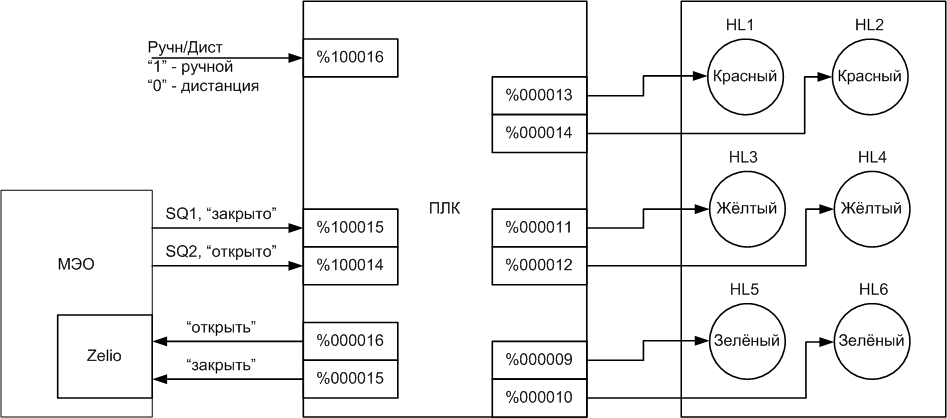
Рис. 13. Подключение входов и выходов контроллера
Состав отчёта по лабораторной работе
В отчёте должна быть отображена следующая информация.
Схема связей конечного автомата управления.
Граф переходов конечного автомата.
Список переменных Concept-проекта с указанием типов и адресов переменных.
Программа реализации конечного автомата на языке ST.