

1-48 / 45.Нелинейные звенья
.pdfНелинейные системы управления |
Стр. 1 |
Обложка |
Аннотация |
Оглавление |
Литература |
Фрагментконспекта лекцийКлиначёва Н.В. поТАУ
Нелинейные системы управления
Нелинейнаясистемауправления Нелинейнойсистемой автоматического регулирования называется такая система, котораясодержит хотябы однозвено описываемое нелинейнымуравнением.
Существующие нелинейные САР отличаются разнообразием: по своей физической природе, по целевой функции, по принципам действия, по виду нелинейностей, по характеру переходных процессов. Это затрудняет разработку универсального математического аппарата анализа и синтеза подобных САР. Наиболее хорошо изученными являются следующие группы нелинейныхсистем:
 Системы с переключениями
Системы с переключениями
 Системы релейного действия
Системы релейного действия
 Системы экстремальные
Системы экстремальные
 ...
...
Это не полный перечень известных нелинейных систем. Неупомянутые системы характеризуются тем или иным атрибутомуникальности. Либо системауникальна по принципу действия, либоимеетуникальное математическое описание, и т.д.
Фазовая плоскость
Способ графического представления сигнала на экране осциллографа нагляден и удобен в практической инженерии. В большинстве случаев по горизонтали осуществляется временная развертка. Но существуют осциллографы, имеющие внешний вход канала горизонтальной развертки. В этом случае на X и на Y входы можно подать разные сигналы и осциллограмма станет двухмерной фазовой плоскостью, перемещение изображающей точки в которой будет характеризовать движение двухкоординат объекта.
Традиционное математическое описание нелинейных систем часто использует фазовую плоскость, чтобы представить в графическойформе либо характеристику нелинейного звена, либо траекторию движения производной выходной координаты САР взависимости от самойкоординаты (см. чертеж 1). В большинстве случаев траекторииизображающейточки узнаваемы (фрагменты спиралей, окружностей, парабол, прямых линий), имеют характеризующие систему особенности и позволяют инженерупринимать решения всоответствиис разработаннымиметодиками.
Чертёж 1
Типовыенелинейныезвенья
Большая часть модулейнелинейных систем поддаетсялинеаризации и описывается типовыми динамическими звеньями. Но один или два модуля линеаризовать не удается, в виду существенного характера проявления свойственной им
http://model.exponenta.ru/k2/Jigrein/md_043.htm |
10.12.2011 15:15:42 |

Нелинейные системы управления |
Стр. 2 |
Большая часть модулейнелинейных систем поддаетсялинеаризации и описывается типовыми динамическими звеньями. Но один или два модуля линеаризовать не удается, в виду существенного характера проявления свойственной им нелинейности. Накопленный опыт инженеров позволил выделить встречающиеся типовые нелинейности и систематизировать их. Можно выделить тригруппы нелинейныхзвеньев:
 Нелинейные звенья с однозначными характеристиками(статическиенелинейности)
Нелинейные звенья с однозначными характеристиками(статическиенелинейности)
 Нелинейные звенья с многозначными характеристиками(динамические нелинейности)
Нелинейные звенья с многозначными характеристиками(динамические нелинейности)  Особые нелинейные элементы (неподдаютсяклассификации)
Особые нелинейные элементы (неподдаютсяклассификации)
Визуально, отличительный признак для звеньев первых двух групп проявляется при построении фазовых траекторий (характеристик звеньев). Начертежах 2 и3 представленымоделизвеньев. Запустите процесс симуляции. Затем обязательно выполните команду меню Симуляция > Resume. Различие между однозначной и многозначной характеристиками будут наглядноиллюстрировать фазовые портреты звеньеввправыхосциллографах.
Нелинейныезвенья с однозначнымихарактеристиками
Однозначная характеристика звена свидетельствует о том, что кроме наличия чувствительности к значению входной координаты, звено нечувствительно ни к направлению движения входной координаты ни к её производным. Модели таких звеньев можно составить без применения блоков с эффектом памяти (интеграторов, регистров задержки, звеньев чистого запаздывания). Специализированные моделирующие программы имеют в своих библиотекахготовые блокис однозначными нелинейностями. Назовем их.
 Звено "Зона нечувствительности"
Звено "Зона нечувствительности"
 Звено "Ограничение" или "Насыщение"
Звено "Ограничение" или "Насыщение"
 Звено "Реледвухпозиционноебез гистерезиса"
Звено "Реледвухпозиционноебез гистерезиса"
 Звено "Релетрехпозиционное без гистерезиса"
Звено "Релетрехпозиционное без гистерезиса"  Звено "АЦПбезгистерезиса"
Звено "АЦПбезгистерезиса"
Чертёж 2
Нелинейныезвенья с многозначными характеристиками
Многозначная характеристика звена свидетельствует о том, что кроме наличия чувствительности к значению входной координаты, звено чувствительно либо к направлению её движения, либо к значению её производных. Модели таких звеньев невозможно составить без применения блоков с эффектом памяти (интеграторов, регистров задержки, звеньев чистого запаздывания). Поэтойпричине специализированныемоделирующие программы не имеют готовых блоков с многозначными нелинейностями (блоки с эффектом памяти ни когда не входят в состав других). Но пользователь может составить модели сам, либо программы могут иметь соответствующие составные модели. Назовем нелинейные звенья с многозначными характеристиками.
" |
" |
http://model.exponenta.ru/k2/Jigrein/md_043.htm |
10.12.2011 15:15:42 |

Нелинейные системы управления |
Стр. 3 |
 Звено "Реледвухпозиционноес положительнымили с отрицательным гистерезисом"
Звено "Реледвухпозиционноес положительнымили с отрицательным гистерезисом"
 Звено "Релетрехпозиционное с положительнымили с отрицательным гистерезисом"
Звено "Релетрехпозиционное с положительнымили с отрицательным гистерезисом"
 Звено "Люфт"
Звено "Люфт"
 Звено "Упор"
Звено "Упор"
 Звено "Сухое трение"
Звено "Сухое трение"
 Звено "Магнитныйгистерезис"
Звено "Магнитныйгистерезис"
Если на входы нелинейных звеньев подавать синусоидальный сигнал, то, очевидно, что сигналы на выходах будут отличаться от синусоиды по форме. Но любой периодический сигнал можно разложить в ряд Фурье и выделить основную гармонику (см. чертежи 2 и 3). Анализируя её фазовый сдвиг можно ввести альтернативную классификацию нелинейных звеньев:
 Звеньяневносящие сдвиг пофазе для основнойгармоники
Звеньяневносящие сдвиг пофазе для основнойгармоники
 Звеньявносящие упреждение по фазе для основнойгармоники (0° ... +90°)
Звеньявносящие упреждение по фазе для основнойгармоники (0° ... +90°)  Звеньявносящие запаздывание по фазе для основнойгармоники (0° ... -90°)
Звеньявносящие запаздывание по фазе для основнойгармоники (0° ... -90°)
Экспериментыс интерактивнымичертежами2 и3 позволяютубедиться втом, чтофазовыйсдвиг не вносят лишьзвенья с однозначными характеристиками. А звенья с многозначными характеристиками делятся на две подгруппы. В практической инженериичаще встречаютсянелинейные звенья вносящие запаздывание по фазе. Причина втом, чтоихконструкция проще илегче придумать регуляторы на их основе. Отметим так же другую особенность практической реализации звеньев. С точки зрения математики звенья обезличены. Это означает, что потенциально они могут быть реализованы в виде устройств преобразующих любую энергонесущую материю. Но существуют ограничения. Примером может быть известное в механике сухое трение. Согласно теории подобия — в электротехнике это не достижимая, сегодня, сверхпроводимость. Однако не следуетдуматьо том, чточто-то невозможно. Например, специалисты вТАУранее использовалианалоговое моделирование систем, паяя вычислительные схемы на операционных усилителях. Ими разработаны схемы представляющие звенья "Упор" и "Реле с отрицательным гистерезисом", но ни один учебник по схемотехнике не описывает их. Для электронщиков существование этих схем — откровение. Очевидно, что с точки зрения теории управления разработка нелинейных устройств вносящихупреждение по фазе — актуальная задача. Сегодня наблюдается несимметричное развитие техническихрешений.
Чертёж 3
Другие яркие свойства нелинейных звеньев можно выявить, если анализировать каким образом ими обрабатываются сигналы разной амплитуды ипостоянная составляющая. Дляпервого эксперимента с моделями звеньев, представленных на чертеже 4, амплитуда входного сигнала выбрана достаточно большой, чтобы преодолевать мертвые зоны. Особый интерес вызывает реакция звена "Упор" - оно исключает постоянную составляющую в сигнале, т.е. является фильтром высоких частот. В результате можно утверждать, что это звено, подобно дифференцирующему каналу ПИД-регулятора, не может выполнять функцию регулятора вструктуре системы (небудучи зашунтированным параллельным каналом чувствительным к постоянной составляющей). Интересна особенность релейных звеньев, чей выходной сигнал имеет фиксированную
http://model.exponenta.ru/k2/Jigrein/md_043.htm |
10.12.2011 15:15:42 |

Нелинейные системы управления |
Стр. 4 |
амплитуду и не зависит от амплитуды входного сигнала, что приводит к снижению чувствительности систем к разбросу параметров. Если на чертеже 4 отключить нижний генератор сигнала и уменьшить в два раза амплитуду верхнего (чтобы не происходило перекрытие мертвых зон звеньев), то можно обнаружить, что лишь звено "Упор" сохраняет работоспособность. Возможно, что реле будет переключаться, если контур системы будет содержать интегратор. Остальные звенья станут причинойстатическихошибок систем ивызывают необходимостьприменениявибрационнойлинеаризации.
Чертёж 4
Особыенелинейные звенья
К группе особых нелинейных звеньев относят те, чьи свойства уникальны и не поддаются классификации. Некоторым особым нелинейным звеньям свойственен атрибут функциональной завершенности. Другие особые звенья, например, "множительное" или "ψ-ячейка" часто входят, как составные части, в блок-схемы более сложных звеньев с неоднозначными характеристиками. Назовем основныеособые нелинейные звенья.
 Звено множительное
Звено множительное
 Звено с параболической четнойхарактеристикой
Звено с параболической четнойхарактеристикой
 Звено с параболической нечетнойхарактеристикой
Звено с параболической нечетнойхарактеристикой
 Звено "ψ-ячейка"
Звено "ψ-ячейка"
 ...
...
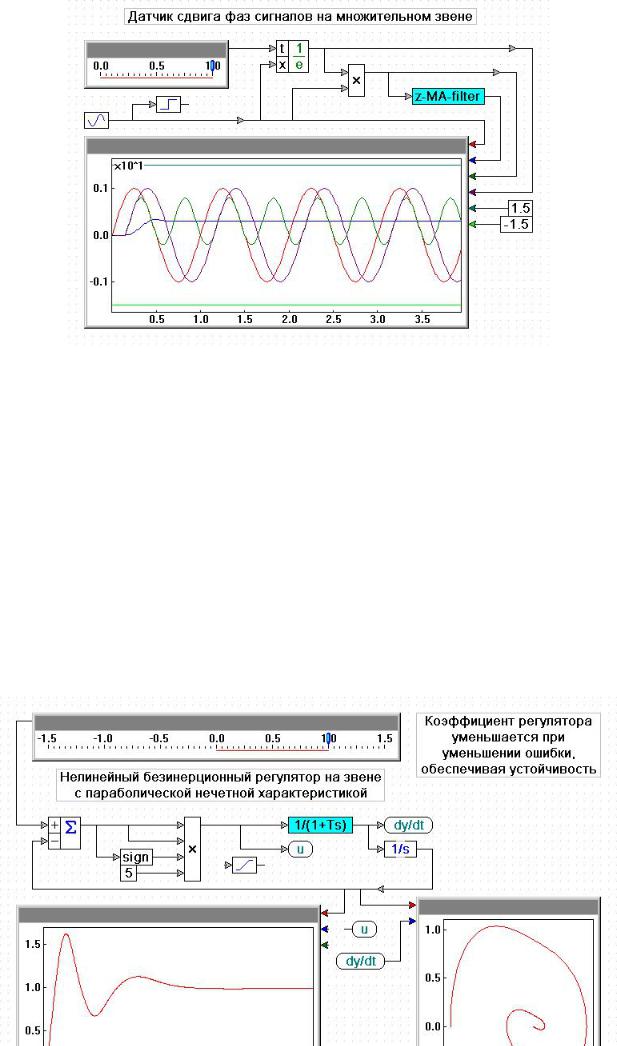
Множительное звено может использоваться с целью идентификации величины фазового сдвига между сигналами на выходахразных звеньевсистем регулирования (см. чертеж 5, где для большей наглядностивыходной сигнал множительного звена усредняется фильтром скользящего среднего). Несмотря на математическую простоту, техническая реализации множительного звена затруднена для большинства доменов энергонесущих материй. Например, не существует полупроводникового устройства, которое непосредственно могло бы перемножать токи или напряжения. Существующие микросхемы перемножителей, с помощью логарифмических преобразователей переводят сигналы в логарифмический домен, складывают их, и вычисляют оригинал (результат перемножения) с помощью экспоненциального преобразователя. Следует отметить, что в системах регулирования сигналы могут существенно различаться по амплитуде. Существуют решения, когда их пропускают через релейные звенья (чрез компараторы) и перемножают элементом "Логическое И". А импульсная последовательность усредняетсялибо фильтрами, либо инерционнымисвойствами объекта регулирования.
http://model.exponenta.ru/k2/Jigrein/md_043.htm |
10.12.2011 15:15:42 |
Нелинейные системы управления |
Стр. 5 |
Чертёж 5
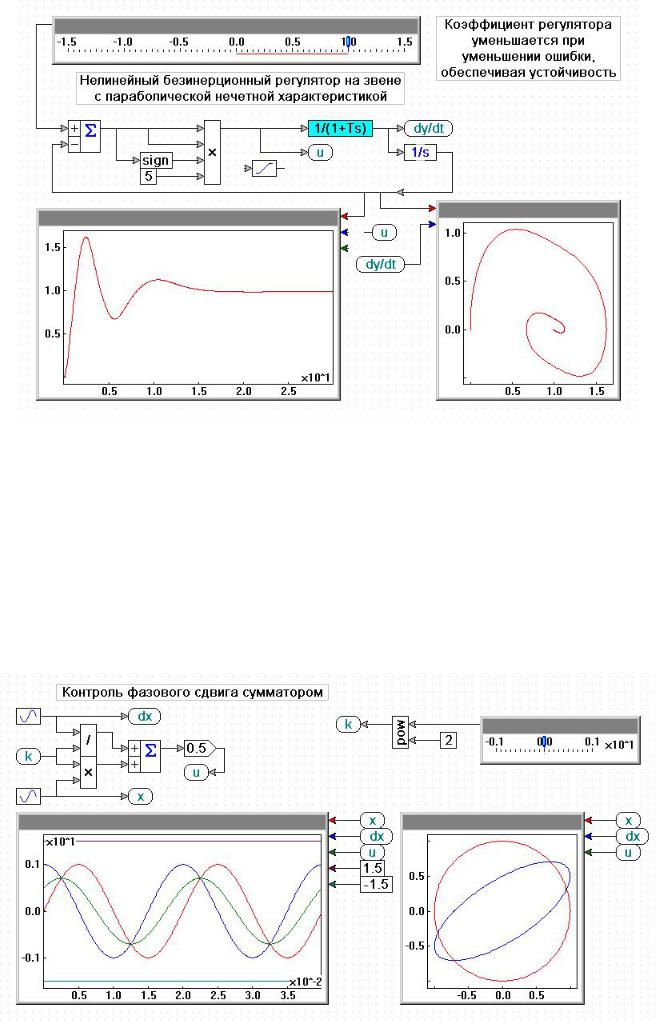
На чертеже 6 представлена САР с нелинейным регулятором на звене с параболической нечетной характеристикой. Частотная характеристика линейной части типовая — вида 1—2. Можно отключить сигналы от второго и третьего входов множительного звена (регулятор станет линейным) и убедиться в том, что система близка к границе устойчивости. В исходном же состоянии САР устойчива в большей степени. Причина в том, что звено с нечетной параболической характеристикой понижает свой коэффициент передачи по мере уменьшения ошибки системы. В частотной области это эквивалентно динамическому перемещению ЛАЧХ разомкнутойСАР вниз. Частота единичного усиления смещается влево (в областьнизкихчастот), чтоприводит к увеличению запасовустойчивости пофазе ипо амплитуде.
Однако, если динамика сигнала задания велика, возможна ситуация когда ошибка САР может принимать большие значения. В результате инерционные массы объекта будут интенсивно разгоняться управляющим сигналом (пропорциональным квадратуошибки), иперерегулирование может стать неприемлемобольшим. В этойситуации, на выходе регулятораполезноввестиограничительвыходного значения.
Другой недостаток параболического регулятора состоит в том, что при малых значениях ошибки коэффициент его передачи стремится к нулю. Особой проблемы в том нет, но асимптотический процесс выборки ошибки может затягиваться на неприемлемо продолжительное время. Решением, в этом случае, является включение параллельного безынерционного канала с коэффициентом передачи в 30..10 раз меньшим коэффициента передачи параболического канала в окрестности ограничения выходного сигнала, что ограничивает динамическое смещение частоты единичного усиления разомкнутого контура вобласть низкихчастотвпределаходной декады или чуть больше.
http://model.exponenta.ru/k2/Jigrein/md_043.htm |
10.12.2011 15:15:42 |
Нелинейные системы управления |
Стр. 6 |
Чертёж 6
Звено с параболической четной характеристикой часто используется как модель объекта экстремальной системы. Примером может быть карбюратор двигателя автомобиля, задача которого — смешивать воздух и пары топлива. Если воздуха много или мало — двигатель будет работать не оптимально, т.е. зависимость имеет некоторый максимум (экстремум), которыйдолжна отслеживать системарегулирования. Примеры такихсистем будут рассмотреныдалее.
Вычисление суперпозиции (суммы) двухсигналов — это линейная операция. Но в релейных регуляторах и в регуляторах переключений она встречается часто. Соответствующий сумматор вычисляет суперпозицию некоторого сигнала (регулируемойкоординаты или ошибкиСАР) и его производной. В силуинерционности объектов, форма сигналов, о которых речь, близка к синусоидальной. Сдвиг фазы между ними — 90°. Суммадвух синусоид — естьсинусоида. Носамое важное — её фаза — которая будет ближе к фазе той входной синусоиды, которая суммируется с большим весовым коэффициентом. Сказанное иллюстрируется интерактивным чертежом 7. Меняя весовые коэффициенты можно регулировать фазу выходной синусоиды в диапазоне от +90° до 0°. Принятие решения об управлении объектом на базе упреждающего сигнала всегда положительносказывается на устойчивости системы.
Чертёж 7
http://model.exponenta.ru/k2/Jigrein/md_043.htm |
10.12.2011 15:15:42 |

Нелинейные системы управления |
Стр. 7 |
Чертёж 7
Существуют идругие, менее изученные, или менее распространенные особыенелинейные звенья. Онихумолчим.
...
29.11.2007
Jigrein |
Model.Exponenta.Ru |
Лицензия |
|
|
|
© Н.В. Клиначёв, 2006-2011. 800x600. |
|
|
|
http://model.exponenta.ru/k2/Jigrein/md_043.htm |
10.12.2011 15:15:42 |