

49-96 / 61.Электрические машины переменного тока, принцип действия
.doc61.Электрические машины переменного тока, принцип действия
П ринцип
действия синхронного генератора.
На
электрических станциях применяют
трехфазные синхронные генераторы
переменного тока высокого и низкого
напряжений. Слово синхронный
обозначает
— одновременный. Это значит, что
одновременно и в строгой математической
зависимости с изменением оборотов
изменяется частота тока Эта зависимость
определяется формулой
ринцип
действия синхронного генератора.
На
электрических станциях применяют
трехфазные синхронные генераторы
переменного тока высокого и низкого
напряжений. Слово синхронный
обозначает
— одновременный. Это значит, что
одновременно и в строгой математической
зависимости с изменением оборотов
изменяется частота тока Эта зависимость
определяется формулой![]() где
п1
—
число оборотов генератора в минуту,
f1
—
частота тока генератора (гц),
р —
число пар полюсов в роторе генератора
Синхронный генератор состоит из
неподвижной части — статора,
в
пазах которого помещается трехфазная
обмотка переменного тока, и
вращающейся части —ротора,
который
представляет собой электромагнит
(рис. 163). Обмотки возбуждения ротора
питаются через щетки и кольца постоянным
током от возбудителя — машины постоянного
тока или какого-нибудь выпрямителя
Ротор синхронного генератора, находящийся
внутри статора, вращают первичным
двигателем, при этом магнитное поле
ротора пересекает витки трехфазной
обмотки статора и индуктирует в них э.
д. с. переменного тока. В некоторых
конструкциях синхронных генераторов
обмотки полюсов неподвижны и укреплены
на станине, а вращается трехфазная
обмотка переменного тока, выполняемая
в пазах стального цилиндра, набранного
из листов электротехнической стали.
Переменный ток в этом случае снимают с
колец, т. е. скользящим контактом, что
является недостатком таких генераторов.
Широкого распространения эти типы
генераторов но нашли.
где
п1
—
число оборотов генератора в минуту,
f1
—
частота тока генератора (гц),
р —
число пар полюсов в роторе генератора
Синхронный генератор состоит из
неподвижной части — статора,
в
пазах которого помещается трехфазная
обмотка переменного тока, и
вращающейся части —ротора,
который
представляет собой электромагнит
(рис. 163). Обмотки возбуждения ротора
питаются через щетки и кольца постоянным
током от возбудителя — машины постоянного
тока или какого-нибудь выпрямителя
Ротор синхронного генератора, находящийся
внутри статора, вращают первичным
двигателем, при этом магнитное поле
ротора пересекает витки трехфазной
обмотки статора и индуктирует в них э.
д. с. переменного тока. В некоторых
конструкциях синхронных генераторов
обмотки полюсов неподвижны и укреплены
на станине, а вращается трехфазная
обмотка переменного тока, выполняемая
в пазах стального цилиндра, набранного
из листов электротехнической стали.
Переменный ток в этом случае снимают с
колец, т. е. скользящим контактом, что
является недостатком таких генераторов.
Широкого распространения эти типы
генераторов но нашли.
У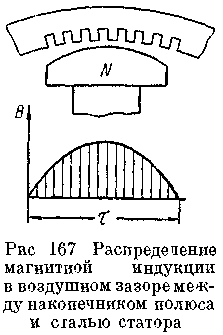 стройство
синхронных генераторов.
Статор синхронного генератора состоит
из чугунной станины — корпуса,
внутри
которого находится сердечник статора,
собранный из отдельных листов
электротехнической стали, изолированной
между собой лаком или тонкой бумагой.
В пазы сердечника укладывают обмотку
статора из медного изолированного
провода (рис. 164).Роторы синхронных
генераторов бывают двух типов —
явнополюсными и неявнополюсными.
Явнополюсными выполняют роторы синхронных
генераторов с небольшим числом
оборотов, обычно соединяемых с тихоходными
гидротурбинами, и генераторов небольшой
и средней мощности (рис. 165). Роторы
неявнополюсные применяют в генераторах
с
большим числом оборотов (3000 об/мин)
и
большой мощности, обычно соединяемых
на одном валу с паровыми турбинами,
называют эти генераторы турбогенераторами.
Сердечники полюсов большей частью
изготовляют из литой стали, а башмаки
— иногда из отдельных листов
электротехнической стали. Обмотку
полюсов выполняют из медных изолированных
проводов. Для получения синусоидально
изменяющейся э. д. с. необходимо иметь
синусоидальное распределение магнитной
индукции в воздушном зазоре. Это
достигается неравномерностью воздушного
зазора между наконечником полюса и
сталью статора: по краям полюсов воздушный
зазор больше, чем под серединой полюса
(рис. 167). На вал генератора надевают два
кольца, изолированных от него, к
которым присоединяют выводы обмотки
возбуждения ротора, их называют
контактными кольцами. На контактные
кольца устанавливают щетки, а к щеткам
подводят постоянный ток от возбудителя.
Чаще всего в качестве возбудителя
применяют машину постоянного тока,
которую называют машинным
возбудителем, а
в последнее время используют для
возбуждения твердые или механические
выпрямители. У большего количества
синхронных машин возбудитель
расположен на одном валу с
генератором (рис. 168), а в последних
конструкциях возбудитель располагают
сверху статора синхронной машины (рис.
169). Отечественной электропромышленностью
выпускаются синхронные генераторы
различной мощности горизонтальные
и вертикальные. Генераторы мощностью
до 400 ква
и
более выпускаются на напряжение 400/230 в
и
начиная с мощности 400 ква
на
напряжение 6300 в.
Горизонтальные генераторы типа СГ (С —
синхронный, Г — генератор) выпускаются
с машинным возбудителем, с возбуждением
от твердых выпрямителей (СГС), с
возбуждением от механических выпрямителей
(СГТ) и другие. Вертикальные гидрогенераторы
типа ВГС (В — вертикальный, Г —
гидрогенератор, С — синхронный)
выпускаются мощностью от 250 до 4800 ква
с
машинными возбудителями. Выпускаются
синхронные генераторы для сопряжения
с дизелями на одном валу типа СГД —
мощностью до 1000 ква
стройство
синхронных генераторов.
Статор синхронного генератора состоит
из чугунной станины — корпуса,
внутри
которого находится сердечник статора,
собранный из отдельных листов
электротехнической стали, изолированной
между собой лаком или тонкой бумагой.
В пазы сердечника укладывают обмотку
статора из медного изолированного
провода (рис. 164).Роторы синхронных
генераторов бывают двух типов —
явнополюсными и неявнополюсными.
Явнополюсными выполняют роторы синхронных
генераторов с небольшим числом
оборотов, обычно соединяемых с тихоходными
гидротурбинами, и генераторов небольшой
и средней мощности (рис. 165). Роторы
неявнополюсные применяют в генераторах
с
большим числом оборотов (3000 об/мин)
и
большой мощности, обычно соединяемых
на одном валу с паровыми турбинами,
называют эти генераторы турбогенераторами.
Сердечники полюсов большей частью
изготовляют из литой стали, а башмаки
— иногда из отдельных листов
электротехнической стали. Обмотку
полюсов выполняют из медных изолированных
проводов. Для получения синусоидально
изменяющейся э. д. с. необходимо иметь
синусоидальное распределение магнитной
индукции в воздушном зазоре. Это
достигается неравномерностью воздушного
зазора между наконечником полюса и
сталью статора: по краям полюсов воздушный
зазор больше, чем под серединой полюса
(рис. 167). На вал генератора надевают два
кольца, изолированных от него, к
которым присоединяют выводы обмотки
возбуждения ротора, их называют
контактными кольцами. На контактные
кольца устанавливают щетки, а к щеткам
подводят постоянный ток от возбудителя.
Чаще всего в качестве возбудителя
применяют машину постоянного тока,
которую называют машинным
возбудителем, а
в последнее время используют для
возбуждения твердые или механические
выпрямители. У большего количества
синхронных машин возбудитель
расположен на одном валу с
генератором (рис. 168), а в последних
конструкциях возбудитель располагают
сверху статора синхронной машины (рис.
169). Отечественной электропромышленностью
выпускаются синхронные генераторы
различной мощности горизонтальные
и вертикальные. Генераторы мощностью
до 400 ква
и
более выпускаются на напряжение 400/230 в
и
начиная с мощности 400 ква
на
напряжение 6300 в.
Горизонтальные генераторы типа СГ (С —
синхронный, Г — генератор) выпускаются
с машинным возбудителем, с возбуждением
от твердых выпрямителей (СГС), с
возбуждением от механических выпрямителей
(СГТ) и другие. Вертикальные гидрогенераторы
типа ВГС (В — вертикальный, Г —
гидрогенератор, С — синхронный)
выпускаются мощностью от 250 до 4800 ква
с
машинными возбудителями. Выпускаются
синхронные генераторы для сопряжения
с дизелями на одном валу типа СГД —
мощностью до 1000 ква
в первом случае получит ускорение, и отдаваемая им на сеть активная мощность увеличится, во втором случае ротор получит замедление, тогда мощность генератора уменьшится. Для изменения реактивной мощности генератора изменяют его возбуждение.
Принцип действия синхронного двигателя. Синхронная машина обратима и может работать как в режиме генератора, так и в режиме двигателя. Конструктивно синхронный двигатель ничем не отличается от синхронного генератора. Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора с магнитным полем полюсов ротора. При работе синхронной машины в режиме двигателя к статору подводят трехфазный переменный ток, а к обмотке возбуждения ротора — постоянный ток. Трехфазный переменный ток создает в обмотке статора вращающееся магнитное поле, которое вращается в пространстве со скоростью
![]()
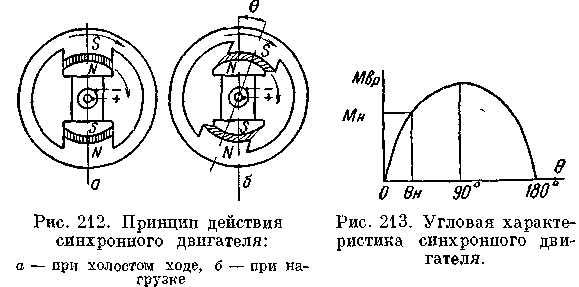
где f — частота переменного тока (гц);
р — число пар полюсов в машине.
Представим себе магнитное поле статора в виде круга с явно выраженными полюсами на нем, вращающегося со скоростью п1об/мин. Эти полюса магнитными силовыми линиями связываются с полюсами ротора противоположной полярности (рис. 212). Вращающееся магнитное поле увлекает за собой полюса ротора и заставляет их вращаться с такой же скоростью. Скорость вращения ротора, равную скорости вращающегося магнитного поля, называют синхронной скоростью. При нагрузке ротор синхронного двигателя отстает на некоторый угол в от вращающегося магнитного поля, причем с увеличением нагрузки угол в увеличивается (рис. 212, б Зависимость вращающего момента синхронной машины от угла в представлена на рисунке 213. Кривая имеет вид синусоиды. При поминальной мощности двигателя угол Q = 20—30°, при этом перегрузочная способность двигателя равна-
![]()
![]()
 Вращающий
момент синхронного двигателя
пропорционален
приложенному
напряжению. Ротор вращается с
синхронной
скоростью, не зависящей
от нагрузки, а при увеличении нагрузки
изменяется только угол в. При
вращении ротора
магнитный поток полюсов
Ф0
пересекает
витки
обмотки статора и индуктирует в них э.
д. с. Е0.
Согласно
уравнению
равновесия э.
д. c.,
приложенное к двигателю
напряжение сети Uс
уравновешивается
суммой обратных э.
д. с. двигателя сумм ЕДВ.
На
основании этого уравнения нарисуем
векторную диаграмму синхронного
двигателя (рис. 214). Вектор тока I
откладываем вертикально. Под углом ф в
сторону опережения откладываем вектор
напряжения сети Uc.
В
фазе с вектором тока откладываем векторы
магнитного потока якоря Фя
и
потока рассеяния Фрс,
каждый из которых индуктирует
соответствующие э. д. с. Ея
и
ЕРС,
отстающие от вектора магнитного потока
на 90°. Откладываем на векторной диаграмме
вектор Ея
и
пристраиваем к нему вектор э. д. с.
рассеяния Eрс,
сумма
этих э. д. с. равна падению напряжения
на синхронном индуктивном сопротивлении
двигателя Хсх
Вращающий
момент синхронного двигателя
пропорционален
приложенному
напряжению. Ротор вращается с
синхронной
скоростью, не зависящей
от нагрузки, а при увеличении нагрузки
изменяется только угол в. При
вращении ротора
магнитный поток полюсов
Ф0
пересекает
витки
обмотки статора и индуктирует в них э.
д. с. Е0.
Согласно
уравнению
равновесия э.
д. c.,
приложенное к двигателю
напряжение сети Uс
уравновешивается
суммой обратных э.
д. с. двигателя сумм ЕДВ.
На
основании этого уравнения нарисуем
векторную диаграмму синхронного
двигателя (рис. 214). Вектор тока I
откладываем вертикально. Под углом ф в
сторону опережения откладываем вектор
напряжения сети Uc.
В
фазе с вектором тока откладываем векторы
магнитного потока якоря Фя
и
потока рассеяния Фрс,
каждый из которых индуктирует
соответствующие э. д. с. Ея
и
ЕРС,
отстающие от вектора магнитного потока
на 90°. Откладываем на векторной диаграмме
вектор Ея
и
пристраиваем к нему вектор э. д. с.
рассеяния Eрс,
сумма
этих э. д. с. равна падению напряжения
на синхронном индуктивном сопротивлении
двигателя Хсх
![]()
поэтому, зная хох, можно узнать величину суммы векторов Ея + EРС. Так как из уравнения равновесия э. д. с. известно, что напряжение сети UС уравновешивается суммой э. д. с. двигателя, то откладываем вектор ОА, равный и противоположный по направлению вектору напряжения сети UС, который и будет представлять сумму э. д. с. двигателя сумм ЕДВ. Вектор противоэ. д. с. двигателя Е0 определится как третья сторона треугольника ОАВ, где известны стороны ОА и ОВ. Из этой векторной диаграммы видно, что
![]() )
)
В ектор
напряжения сети Uc
изобразим
состоящим из двух составляющих, каждая
из которых уравновешивает соответствующую
обратную э. д. с. В данном случае
составляющая — Е0
уравновешивает
э. д. с. Е0,
а
составляющая I
хсх
уравновешивает
э. д. с. Ея
и
Ерс.
ектор
напряжения сети Uc
изобразим
состоящим из двух составляющих, каждая
из которых уравновешивает соответствующую
обратную э. д. с. В данном случае
составляющая — Е0
уравновешивает
э. д. с. Е0,
а
составляющая I
хсх
уравновешивает
э. д. с. Ея
и
Ерс.
Рабочие характеристики синхронного двигателя. Рабочими характеристиками синхронного двигателя называют зависимость оборотов п2 ,тока статора I, подведенной мощности P1 полезного вращающего момента М2, cos ф и к. п. д. т] от полезной мощности на валу двигателя Р2 при постоянных напряжении сети UC, частоте сети f и токе возбуждения iв (рис. 215).Так как скорость вращения ротора п2 не зависит от нагрузки и равна скорости вращающегося магнитного.
Принцип действия асинхронного двигателя. Асинхронный трехфазный двигатель — самый распространенный в промышленности и сельском хозяйстве. Около 95% всех двигателей — асинхронные.
Асинхронный
двигатель изобретен талантливым русским
ученым М. О. Доливо-Добровольским в 1889
г. Простота устройства, дешевизна,
высокий к. п. д., большая надежность
в работе способствовали его быстрому
внедрению во все отрасли хозяйства.
 Принцип
действия асинхронного двигателя
основан на взаимодействии вращающегося
магнитного поля, создаваемого в
трехфазной обмотке статора, и проводников
с током, из которых состоит обмотка
ротора. Скорость вращения поля определяют
из формулы (58)
Принцип
действия асинхронного двигателя
основан на взаимодействии вращающегося
магнитного поля, создаваемого в
трехфазной обмотке статора, и проводников
с током, из которых состоит обмотка
ротора. Скорость вращения поля определяют
из формулы (58)![]() Представим
себе вращающееся магнитное поле в виде
кольца
с двумя постоянными магнитами (рис.
221). В
середине кольца помещена обмотка ротора
в виде короткозамкнутой
беличьей клетки. Вращающееся-магнитное
поле статора индуктирует в проводах
обмотки ротора токи, направление которых
определяют по правилу правой руки. При
этом нужно иметь в виду, что если магнитное
поле вращается по часовой стрелке,
то относительное вращение проводника
нужно принимать против часовой стрелки.В
проводах, находящихся под северным
полюсом, ток направлен
к нам и направление его обозначим
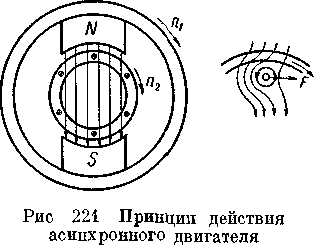
точкой.При взаимодействии магнитного
поля статора и ротора (рис. 221) к проводу
приложена сила F,
заставляющая его перемещаться в сторону
движения поля статора.Если
поле статора вращается со скоростью
n1;
которую называют
синхронной,
то
ротор вращается с меньшей скоростью
n2
которую называют асинхронной.
Отставание
ротора от поля статора называют
скольжением
и
обозначают буквой s.Величина
скольжения может быть определена из
уравнения
Представим
себе вращающееся магнитное поле в виде
кольца
с двумя постоянными магнитами (рис.
221). В
середине кольца помещена обмотка ротора
в виде короткозамкнутой
беличьей клетки. Вращающееся-магнитное
поле статора индуктирует в проводах
обмотки ротора токи, направление которых
определяют по правилу правой руки. При
этом нужно иметь в виду, что если магнитное
поле вращается по часовой стрелке,
то относительное вращение проводника
нужно принимать против часовой стрелки.В
проводах, находящихся под северным
полюсом, ток направлен
к нам и направление его обозначим
точкой.При взаимодействии магнитного
поля статора и ротора (рис. 221) к проводу
приложена сила F,
заставляющая его перемещаться в сторону
движения поля статора.Если
поле статора вращается со скоростью
n1;
которую называют
синхронной,
то
ротор вращается с меньшей скоростью
n2
которую называют асинхронной.
Отставание
ротора от поля статора называют
скольжением
и
обозначают буквой s.Величина
скольжения может быть определена из
уравнения
![]() (162)
(162)
Скольжение
— основная переменная величина
асинхронной машины, от которой зависит
режим ее работы.Из формулы скольжения
можно вывести формулу оборотов ротора
![]()
Число оборотов ротора п2 при номинальных нагрузке, напряжении и частоте указывают на заводском щитке двигателя.Величина скольжения асинхронных двигателей составляет примерно s = 0,01- 0,06. Скольжение может быть определено также в процентах.
![]() (164)
(164)
У асинхронного двигателя при неподвижном роторе скольжение имеет максимальное значение 5=1, так как n2 = 0.В начальный момент пуска в ход асинхронного двигателя, когда n2 еще равно нулю, 5 = 1.
Устройство
асинхронных двигателей. Асинхронный
двигатель состоит из неподвижной части
— статора
и
вращающейся — ротора.Статор
представляет собой стальной сердечник
в виде пустотелого цилиндра, набираемого
из отдельных листов
электротехнической
стали, изолированных между собой лаком.
Внутри цилиндра выштампованы пазы, куда
укладывают обмотку статора. По
устройству статор асинхронного
двигателя почти ничем не отличается от
статора синхронной машины. Обмотки
статоров асинхронной и синхронной машин
рассчитывают и выполняют аналогично
(рис. 222).Внутри статора помещается ротор,
представляющий собой стальной цилиндр,
который набирают из отдельных листов
электротехнической стали, покрытых
изоляционным лаком.
Роторы
бывают двух типов: короткозамкнутые
и
фазные.
В
пазы короткозамкнутого ротора укладывают
обмотку в
виде беличьей клетки, выполняемую из
медных стержней, которую с торцовых
сторон замыкают кольцами (рис.223,а).
В
двигателях небольшой мощности, до
100
квт,
беличью
клетку
изготовляют путем заливки пазов ротора
алюминием
под давлением.
Беличью клетку от
стали ротора не изолируют,
так как проводимость
проводников обмотки
в десятки раз больше
проводимости стали. При отливке беличьей
клетки из
алюминия одновременно отливают и боковые
кольца вместе с вентиляционными
крыльями (рис. 224).В
пазы фазного ротора
укладывают трехфазную
обмотку, выполняемую
по типу обмотки
статора. Разрез двигателя с фазным
ротором представлен па рисунке 225.
Как правило, фазную
обмотку ротора
оединяют
в звезду. При этом концы обмотки соединяют
вместе,
а начала присоединяют к контактным
кольцам, на
которые устанавливают щетки, соединенные
с пусковым реостатом.С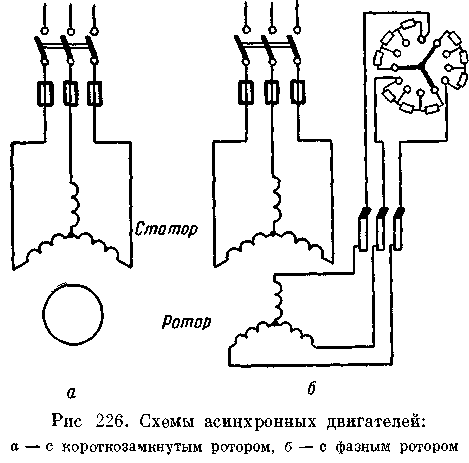 хемы
двигателей приведены на рисунке 226.
Выводы обмоток асинхронных двигателей
обозначают следующим образом:
хемы
двигателей приведены на рисунке 226.
Выводы обмоток асинхронных двигателей
обозначают следующим образом:
![]()
Обмотки двигателя могут быть соединены в звезду или в треугольник. Для удобства соединения обмоток в треугольник выводы обмоток присоединены к доске зажимовно схеме, приведенной на рисунке 227, а. На том же рисунке показаны способы и схемы соединения обмоток. Если на паспорте двигателя написано 220/380 в и стоит обозначение треуг/звезда, то это значит, что при линейном напряжении в сети 220 в обмотки нужно соединить в треугольник, а при линейном напряжении 380 в — в звезду. Выводы обмоток ротора обозначают буквами Р1 Р.2 Р3. В СССР выпускается единая серия асинхронных двигателей А. В нее входят двигатели мощностью от 0,6 до 125 кет. Все двигатели этой серии выполняются с коротко-замкнутой обмоткбй из алюминия. Эти двигатели имеют чугунный корпус, а при малых мощностях корпус отливают из сплава с большим содержанием алюминия, тогда они обозначаются как серия АЛ. Если двигатели имеют закрытую конструкцию с обдувом внешней ребристой поверхности статора при помощи вентилятора, укрепляемого на валу, тогда они обозначаются как серия АО, а при изготовлении корпуса из алюминия — АОЛ.Для замены существующей серии асинхронных электродвигателей А и АО разработана новая единая серия А2