

Лекции по системному анализу
.pdfстаночниками, регулятором Уатта, автопилотом, в рефлекторных реакци- ях животных и т.п.
Следующие типы управления и соответствующие им подклассы сис- тем возникли в связи с необходимостью управления в условиях, когда ли- бо невозможно задать опорную траекторию на весь период времени, либо уклонение от нее столь велико, что невозможно вернуться на нее (регули- рование обычно осуществляется при «малых» в известном смысле укло- нениях y(t )− y0 (t )). В этих случаях необходимо спрогнозировать теку- щую траекторию y(t) на будущее и определить, пересечет ли она целевую область G. Управление состоит в подстройке параметров системы до тех пор, пока такое пересечение не будет обеспечено. Этому и соответствует третий тип управления системами. Примерами такого управления являют- ся процессы адаптации живых организмов к изменяющимся условиям жизни, работа пилотов и шоферов, адаптивные и автоматизированные системы управления и т.п.
Иногда может оказаться, что среди всех возможных комбинаций значений управляемых параметров системы не найдется такой, при кото- рой ее траектория пересечет целевую область. Это означает, что цель для данной системы недостижима. Но, может быть, она достижима для другой системы? Сказанное дает еще один способ управления: изменять структу- ру системы в поисках такой, при которой возможно попадание в целевую область. По существу, имеет место перебор разных систем, но это систе- мы, создаваемые не произвольно, а в соответствии с наличными средства- ми. Такое управление, называемое структурной адаптацией, выделим в четвертый тип управления системами. Примерами реализации указанного типа управления являются гибкие автоматизированные производства, вы- числительные сети, сельскохозяйственные машины со сменными навес- ными и прицепными устройствами, мутации организмов в процессе есте- ственного отбора, организационные изменения в государственном аппара- те и т.д.
31
ГЛАВА 2
ИЕРАРХИЧЕСКИЕ СИСТЕМЫ
2.1. Определение иерархической системы
Иерархическими системами будем называть системы, основными структурно–функциональными характеристиками которых являются:
1) принадлежность подсистем, входящих в состав системы,
различным иерархическим уровням;
2)приоритет действий подсистем некоторого уровня по отношению
кдействиям подсистем более низких уровней;
3)зависимость действий подсистем некоторого уровня от фактического выполнения своих функций подсистемами более низких уровней.
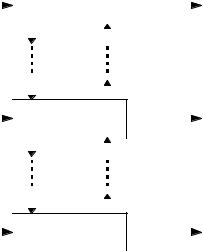
Иерархическая система в общем случае представляет собой набор взаимодействующих вертикально соподчиненных подсистем. Структура иерархической системы с n уровнями и соответственно n подсистемами показана на рис. 2.1, на котором через Si , X i , Yi , Ci , Wi обозначены соответственно подсистема i-го уровня иерархии, вход в эту подсистему,
выход из этой подсистемы, воздействие подсистемы
иерархии на подсистему i-го уровня иерархии, обратная связь подсистем (i − 1)-го и i-го уровней иерархии.
32
Xn |
|
|
|
Sn |
|
Yn |
|
|
|
|
|||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
Cn-1 |
|
Wn |
||||
|
|
||||||
|
C |
i |
|
Wi+1 |
|||
|
|
||||||
|
|
||||||
Xi |
|
|
|
|
|
|
Yi |
|
|
|
|
Si |
|
||
|
Ci-1 |
|
Wi |
||||
|
|
||||||
|
C |
1 |
|
W2 |
|||
|
|
||||||
|
|
||||||
|
|
|
|
|
|||
X1 |
|
|
|
|
|
|
Y1 |
|
|
|
|
S1 |
|
||
Рис. 2.1. Структура иерархической системы.
При функционировании системы каждая подсистема производит преобразование входных данных в выходные обычно в соответствии с заранее заданным детерминированным алгоритмом. Это преобразование,
как правило, является динамическим процессом, протекающем в реальном масштабе времени. Входы и выходы, обеспечивающие обмен подсистем с окружающей средой, могут в общем случае иметь подсистемы всех уровней иерархии, однако чаще всего обмен со средой осуществляют подсистемы самых низких уровней. Заметим, что взаимодействие может осуществляться не только между подсистемами двух смежных уровней,
как для простоты показано на рис. 2.1.
На функционирование подсистемы любого уровня непосредственное воздействие могут оказывать подсистемы различных вышерасположенных уровней, но обычно воздействует подсистема смежного более старшего уровня. Это воздействие имеет для подсистем нижележащих уровней обязывающий характер, что определяет приоритет действий и целей подсистем более высоких уровней. Далее это воздействие подсистем некоторого уровня на подсистемы более низких уровней будет называться вмешательством. В иерархических системах с детерминированным алгоритмом функционирования вмешательство обычно реализуется в виде изменения параметров подсистем
33
нижележащего уровня. В системах же с недетерминированным алгоритмом приоритет действий определяет порядок решения соответствующих задач подсистемами на разных уровнях. В этом случае обычно задача (или алгоритм решения) подсистемы на нижележащем уровне не определяется в окончательном виде до тех пор, пока не решена некоторая задача подсистемой на вышележащем уровне. Подсистемы и элементы верхнего и нижнего уровней будем называть соответственно
вышестоящими и нижестоящими.
Хотя вмешательство реализуется в виде последовательности директив, направляемых сверху вниз по иерархии, успешность действия иерархической системы в целом, ее подсистем и элементов любого уровня зависит от поведения всех подсистем и элементов системы. Так как вмешательство предшествует действиям подсистем более низких уровней, успешность функционирования подсистемы верхнего уровня зависит не только от ее действий, но и от соответствующих реакций подсистем нижних уровней. Поэтому можно считать, что качество функционирования всей иерархической системы обеспечивается
обратной связью, то есть реакциями на вмешательство, информация о которых направляется снизу вверх (см. рис. 2.1). Это очевидно в случае, когда обмен с окружающей средой производится в основном или исключительно подсистемой на самом нижнем уровне иерархии системы.
2.2. Основные типы иерархических систем
Несмотря на широкое разнообразие иерархических систем, можно выделить три основных типа систем этого класса. При этом тип конкретной иерархической системы определяется в основном содержанием понятия «уровень иерархии» этой системы. Введем следующие три различных по содержанию понятия уровня иерархии:
1)уровень описания или абстрагирования;
2)уровень сложности принимаемого решения;
3)организационный уровень.
34
Для этих уровней введем соответственно следующие термины: «страта», «слой» и «эшелон». Термин «уровень» относится к любому из этих понятий. Заметим, что при описании реальных иерархических систем, как правило, используются все три понятия уровня.
2.2.1. Стратифицированное описание сложных систем
Из определения сложной системы следует, что невозможно составить полное описание такой системы, содержащее все ее структурные, функциональные, поведенческие и другие характеристики.
Поэтому возникает задача построения такого описания системы, которое,
с одной стороны, содержало бы необходимые данные о системе и, с
другой стороны, являлось бы достаточно простым. Решение этой задачи обеспечивается использованием иерархической структуры описания.
Описываемая сложная система представляется семейством моделей,
описывающих поведение системы при использовании различных уровней абстрагирования. Для каждого уровня существует ряд законов,
принципов, переменных, с помощью которых и описывается поведение системы. Чтобы такое иерархическое описание было эффективным,
необходима как можно большая независимость моделей для различных уровней системы. Такое иерархическое описание будем называть
стратифицированным описанием, а уровни абстрагирования в стратифицированном описании – стратами. Независимость страт открывает возможность для более детального изучения поведения системы, однако предположение о полной независимости страт может привести к неполному пониманию поведения системы в целом.
В качестве примера рассмотрим стратифицированное описание электронной вычислительной машины, содержащее две страты. Это описание схематично представлено на рис. 2.2.
35
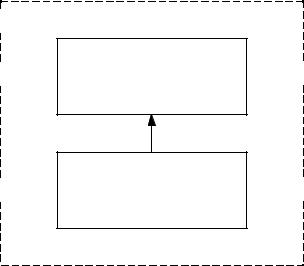
 ЭВМ
ЭВМ
Страта 2:
Вход  математические
математические  Выход операции
Выход операции
Страта 1:
Вход  физические
физические  Выход операции
Выход операции
Рис. 2.2. Стратифицированное описание ЭВМ.
На первой страте система описывается на языке физических законов,
управляющих работой и взаимодействием ее подсистем, в то время как на второй страте используются абстрактные нефизические понятия, такие,
как информационные потоки, программы, команды, двоичные разряды и т.п. На первой страте интерес представляет правильное функционирование различных электронных компонентов, на второй страте – проблемы вычисления, программирования и т.д., при этом стоящие за этим физические законы в явном виде не рассматриваются.
Разумеется, может представлять интерес и описание ЭВМ или каких-то ее подсистем и на других стратах, кроме этих двух; например, так называемая системная страта будет полезной при использовании ЭВМ в качестве составной части других систем.
Другой пример стратифицированного описания – описание автоматизированного промышленного комплекса. Описание этого комплекса имеет три страты: 1) физические процессы обработки материалов и преобразования энергии, 2) управление и обработка информации, 3) экономика производства с точки зрения его прибыльности. Структура стратифицированного описания этого комплекса представлена на рис. 2.3. Заметим, что на любой из этих трех страт мы имеем дело с одним и тем же объектом – основным физическим
36
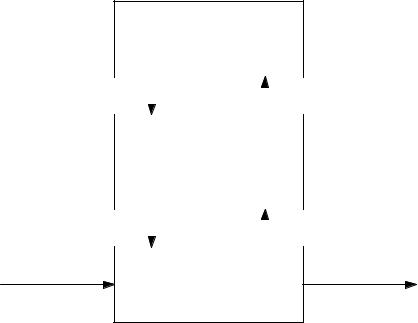
продуктом. На первой страте он рассматривается как физический объект,
который подлежит обработке в соответствии с физическими законами; на второй страте его рассматривают как управляемую переменную; на третьей страте это уже товар как экономическая категория. Для каждого из этих аспектов системы имеется свое описание и своя модель, однако система, конечно, остается одной и той же.
Страта 3: экономические факторы
|
|
|
|
|
Вмешательство |
|
Обратная связь |
||
|
||||
|
|
|
|
|
Страта 2: управление и обработка информации
|
|
|
|
|
Управление |
|
Обратная связь |
||
|
||||
|
|
|
|
|
Страта 1:
Сырье Готовая продукция
физические
процессы
Рис. 2.3. Структура стратифицированного описания автоматизированного промышленного комплекса.
Приведем некоторые общие характеристики стратифицированного описания систем.
1.Выбор страт, в терминах которых описывается данная система, зависит от исследователя системы, его знаний и заинтересованности в деятельности системы, хотя для многих систем некоторые страты кажутся естественными, внутренне им присущими.
2.Аспекты описания функционирования системы на различных стратах в общем случае не связаны между собой, поэтому принципы и законы, используемые для характеристики системы на любой страте, в
37
общем случае не могут быть выведены из принципов и законов,
используемых на других стратах.
3. Существует асимметричная зависимость между условиями функционирования на различных стратах.
Требования, предъявляемые к работе системы на любой страте,
выступают как условия или ограничения функционирования на нижестоящих стратах. Это находится в соответствии с постулированным приоритетом действий подсистем на различных уровнях иерархии.
Например, необходимость выполнения ЭВМ арифметических и других операций накладывает определенные ограничения на используемые для их реализации физические процессы.
4. На каждой страте имеется свой собственный набор концепций,
принципов и терминов.
То, что является объектом рассмотрения на данной страте, более подробно раскрывается на нижерасположенной страте; элемент становится подсистемой; подсистема на данной страте является системой для нижележащей страты. На нижней страте мы концентрируем внимание на действиях подсистем, откладывая изучение их взаимодействия для вышестоящих страт. Учитывая, что для каждой страты существует конкретный набор понятий и терминов, используемых при описании системы на этой страте, как правило, имеются и различные языки.
5. Понимание системы возрастает при последовательном переходе от одной страты к другой: чем ниже мы спускаемся по иерархии, тем более детальным становится раскрытие системы, чем выше мы поднимаемся, тем яснее становится смысл и значение всей системы.
Обращаясь к нижним стратам, можно более точно и детально объяснить, каким образом система функционирует, как осуществляется та или иная конкретная операция. С другой стороны, при движении вверх по иерархии описание становится более широким, охватывая большее число подсистем и большие периоды времени. В таком более широком контексте легче понять смысл и назначение подсистем.
38
Таким образом, для правильного понимания сложной системы существенное значение имеет стратифицированное описание этой системы, представляющее некоторую иерархическую систему. При построении этого описания вначале можно ограничиться, например,
одной стратой в зависимости от интересующей нас задачи и имеющихся данных о сложной системе. Затем можно либо детализировать свои знания о системе, двигаясь вниз по иерархии, либо достичь более глубокого понимания целей функционирования и назначения системы, двигаясь вверх по иерархии.
2.2.2. Многослойные иерархические системы принятия решений
Другое понятие уровня иерархии связано с процессами принятия сложных решений. Почти в любой реальной ситуации принятия решений являются существенными два простых, но важных положения:
1. Когда приходит время принимать решение, принятие и выполнение решения нельзя откладывать.
Любая отсрочка просто означает, что не найдено такого нового или изменения старого действия, которое было бы предпочтительнее других возможных вариантов.
2. Неясность относительно последствий различных альтернативных действий и отсутствие достаточных знаний об имеющихся связях не позволяют получить достаточно полное представление о ситуации, которое необходимо для рационального выбора действий.
Эти два положения имеют следствием основную дилемму принятия решения: с одной стороны, необходимо действовать немедленно, с другой же – столь же необходимо, прежде чем приступать к действиям,
попытаться лучше понять ситуацию. При принятии решения в сложных ситуациях для разрешения этой дилеммы эффективным является представление процесса принятия решения в виде иерархической системы. При этом определяется набор подпроблем, которые пытаются решить последовательно таким образом, что решение любой подпроблемы
39
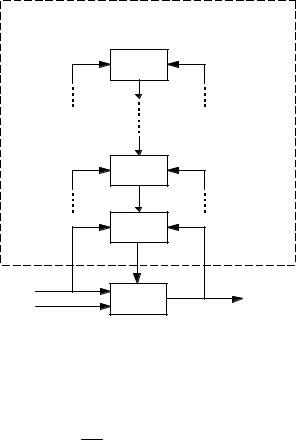
из этого набора определяет какие-то параметры в следующей подпроблеме, так что эта подпроблема становится полностью определенной и можно приступать к ее решению. Решение первоначальной основной проблемы будет достигнуто, как только будут решены все подпроблемы. Таким образом, сложная проблема принятия решения делится на последовательно решаемые более простые подпроблемы, так что решение всех подпроблем позволяет решить и исходную проблему. Пример такого деления показан на рис. 2.4.
Система принятия решений S
Sn
xn-1
x2
S2
x1
S1
P
Рис. 2.4. Многослойная иерархическая система, представляющая систему принятия решений.
На этом рисунке через Si , i =1,n , обозначен i-й принимающий решения элемент. Выход элемента (например, S2 ) есть решение или последовательность решений подпроблемы, зависящей от параметра,
определяемого входом x2 . Этот вход в свою очередь является выходом принимающего решения элемента более высокого уровня. Такую иерархическую систему будем называть иерархической системой слоев
40