

Sigma-delta ацп первого порядка

Рис. 3.12
Не вдаваясь в детали, работу Σ∆ АЦП можно описать следующим образом. Представим, что постоянное напряжение подается на вход VIN. Сигнал на выходе интегратора в точке А при этом постоянно нарастает или убывает. С выхода компаратора сигнал подается обратно через одноразрядный ЦАП на суммирующий вход в точке B. Благодаря отрицательной обратной связи, соединяющей выход компаратора через одноразрядный ЦАП с точкой суммирования, среднее значение постоянного напряжения в точке B стабилизируется на уровне VIN. Вследствие этого, среднее выходное напряжение ЦАП равняется входному напряжению VIN. В свою очередь, среднее выходное напряжение ЦАП определяется плотностью потока единиц в одноразрядном потоке данных, следующего с выхода компаратора. Когда значение входного сигнала увеличивается до +VREF, число единиц в последовательном потоке данных увеличивается, а число нулей уменьшается. Точно так же, когда значение сигнала приближается к отрицательному значению – VREF, число единиц в последовательном потоке данных уменьшается, а число нулей увеличивается. Попросту говоря, в последовательном потоке разрядов на выходе компаратора содержится среднее значение входного напряжения. Цифровой фильтр и дециматор обрабатывают последовательный поток битов и выдают окончательные выходные данные.
Принцип формирования кривой распределения шума квантования в частотной области объясняется на простой модели Σ∆-модулятора, показанной на рис.3.13.
УПРОЩЕННАЯ ЛИНЕАРИЗИРОВАННАЯ МОДЕЛЬ SIGMA-DELTA МОДУЛЯТОРА В ЧАСТОТНОЙ ОБЛАСТИ

Y = f X 1 + Q f
/ \
СИГНАЛЬНАЯ СОСТАВЛЯЮЩАЯ ШУМОВАЯ СОСТАВЛЯЮЩАЯ
Рис. 3.13
Интегратор в Σ∆-модуляторе представлен в виде аналогового ФНЧ с передаточной функцией H(f) = 1/f. Эта передаточная функция имеет обратную входному сигналу амплитудную характеристику. Одноразрядный источник импульсов генерирует шум квантования Q, который добавляется к выходному сигналу суммирующего блока. Если считать входной сигнал равным X, а выходной - равным Y, то сигнал на выходе входного сумматора должен быть X - Y. Эта величина умножается на передаточную функцию фильтра 1/f, и результат подается на один из входов выходного сумматора. В итоге получается выражение для выходного напряжения Y в виде:
Y = — (X - Y ) + Q f
Это выражение может быть легко решено относительно Y c аргументами X, f и Q:
Y =
X Q ⋅ f
f+1 f+1
Обратите внимание, что, когда частота f приближается к нулю, значение выходного напряжения Y стремится к X, а шумовая составляющая устремляется к нулю. На более высоких частотах амплитуда сигнальной составляющей стремится к нулю, а шумовая составляющая приближается к Q. При дальнейшем повышении частоты выходной сигнал состоит практически из одного шума квантования. В сущности, аналоговый фильтр представляет собой ФНЧ для сигнала и ФВЧ для шума квантования. Иными словами, аналоговый фильтр выполняет функцию формирования кривой распределения шума квантования в модели Σ∆-модулятора.
При фиксированной входной частоте аналоговый фильтр дает тем большее затухание, чем выше порядок этого фильтра. Это же положение с определенным допущением справедливо для Σ∆-модуляторов.
С ростом числа каскадов интегрирования и суммирования в Σ∆-модуляторе достигается лучший эффект при формировании кривой распределения шума квантования и лучшее эффективное число разрядов (ENOB) при фиксированном коэффициенте избыточной дискретизации, как это следует из рис.3.14 для Σ∆-модуляторов первого-второго порядков. Блок-схема Σ∆-модулятора второго порядка представлена на рис.3.15. До недавнего времени считалось, что Σ∆ АЦП третьего и более высокого порядков должны быть потенциально нестабильными при определенных входных сигналах. Последние исследования, рассматривающие компараторы c конечным, а не с бесконечным коэффициентом усиления, показали несостоятельность этого предположения. Даже если и существует неустойчивость, она не вносит существенной погрешности, так как цифровой сигнальный процессор (DSP) цифрового фильтра и дециматор в состоянии распознать возникающую неустойчивость и предотвратить ее.
На рис.3.16 показаны соотношения между порядком Σ∆-модулятора и уровнем избыточной дискретизации, необходимым для достижения требуемого отношения сигнал/шум (SNR). В частности, если коэффициент избыточной дискретизации равен 64, идеальная система второго порядка способна обеспечить отношение сигнал/шум на уровне 80 дБ. Этим подразумевается, что значение эффективного числа разрядов (ENOB) равное приблизительно 13. Хотя фильтрация, выполняемая цифровым фильтром и дециматором, может приводить к любой желаемой степени точности, нет смысла выводить более 13 двоичных разрядов. Дополнительные разряды не дадут никакой полезной информации о сигнале, и информация будет подавлена шумом квантования, если не использовать дополнительной фильтрации. Повышенная разрешающая способность может быть достигнута за счет увеличения коэффициента избыточной дискретизации и/или за счет использования модулятора более высокого порядка.
ФОРМИРОВАНИЕ КРИВОЙ РАСПРЕДЕЛЕНИЯ ШУМА КВАНТОВАНИЯ SIGMA-DELTA МОДУЛЯТОРОВ

Рис. 3.14 SIGMA-DELTA АЦП ВТОРОГО ПОРЯДКА

Рис. 3.15
ЗАВИСИМОСТИ ОТНОШЕНИЯ СИГНАЛ/ШУМ (SNR) ОТ КОЭФФИЦИЕНТА ИЗБЫТОЧНОЙ ДИСКРЕТИЗАЦИИ ДЛЯ Σ∆-МОДУЛЯТОРОВ 1-ГО, 2-ГО И 3-ГО ПОРЯДКОВ

Рис. 3.16
Микросхема AD1877 является 16-разрядным стерео-Σ∆ АЦП с быстродействием 48 КSPS, которое удовлетворяет требованиям высококачественной обработки звука. Ключевые технические характеристики данной микросхемы отражены на рис.3.17. Это устройство имеет коэффициент избыточной дискретизации 64X и модулятор четвертого порядка. Внутренний цифровой КИХ фильтр данного АЦП имеет линейную фазовую характеристику. Частотная характеристика данного фильтра приведена на рис.3.18. Фильтр имеет неравномерность частотной характеристики в полосе пропускания - 0,006 дБ и ослабление более 90 дБ в полосе задержки. Ширина области перехода от полосы пропускания к полосе задержки составляет всего 0,1fs, где fs — эффективная частота дискретизации AD1877 (максимум 48 КSPS). Очевидно, что такой фильтр было бы невозможно реализовать в аналоговом виде.
16-РАЗРЯДНЫЙ СТЕРЕО 48 kSPS SIGMA-DELTA АЦП AD1877
Однополярное питание +5 В
Двухканальные аналоговые недифференциальные входы
Динамический диапазон 92 дБ (тип.)
Отношение сигнал/общие нелинейные искажения плюс шум S/(THD+H) 90 дБ (тип.)
Неравномерность АЧХ дециматора в полосе пропускания 0,006 дБ
Σ∆-модулятор 4-го порядка с коэффициентом избыточной дискретизации 64
3-х каскадный дециматор с линейной фазой
Потребляемая мощность менее 100 мВт
Режим пониженного энергопотребления (power-down)
Индикация входной перегрузки
Встроенный источник опорного напряжения
Гибкий выходной последовательный интерфейс
Малогабаритный (SOIC) 28-контактный корпус
Рис. 3.17
Все ZA АЦП имеют определенное время установки, связанное с внутренним цифровым фильтром, которое невозможно сократить. В задачах, где необходимо применять мультиплексирование и существует различие между входными напряжениями соседних каналов, сигнал на входе АЦП является ступенчатой функцией.. Фактически, при коммутации каналов выход мультиплексора может выдавать на ZA АЦП ступенчатое напряжение с перепадами, соответствующими полному динамическому диапазону. Поэтому в таких приложениях необходимо обеспечить требуемое адекватное время установки фильтра. Но это не означает, что ZA АЦП нельзя использовать в приложениях, требующих мультиплексирования., Просто в этом случае необходимо учитывать время установки цифрового фильтра.
Например, групповая задержка КИХ-фильтра микросхемы AD1877 составляет 36/fs и представляет собой время, которое требуется входному воздействию в форме ступенчатой функции для преодоления половины всех каскадов цифрового фильтра. Поэтому, полное время установки составляет 72/fs или приблизительно 1,5 мс при дискретизации с частотой 48 КSPS и коэффициенте избыточной дискретизации 64X.
ХАРАКТЕРИСТИКИ КИХ-ФИЛЬТРА (FIR) 16-РАЗРЯДНОГО СТЕРЕО SIGMA-DELTA 48 kSPS АЦП AD1877

fs- ЧАСТОТА ДИСКРЕТИЗАЦИИ, ТИПИЧНЫЕ ЗНАЧЕНИЯ 32 КSPS, 44,1
КSPS ИЛИ 48 КSPS
ОБЛАСТЬ ПЕРЕХОДА ОТ ПОЛОСЫ ПРОПУСКАНИЯ К ПОЛОСЕ
ЗАДЕРЖКИ: ОТ 0,45 fs ДО 0,55 fs
ВРЕМЯ УСТАНОВЛЕНИЯ = 72 / fs = 1,5 мс ДЛЯ fs = 48 КSPS
ГРУППОВАЯ ЗАДЕРЖКА = 36 / fs = 0,75 мс ДЛЯ fs = 48 КSPS
Рис. 3.18
В других приборах, таких как низкочастотный, с высоким разрешением, 24-разрядный измерительный Σ∆ АЦП (типа серии AD77xx), могут использоваться другие типы цифровых фильтров. Например, фильтры с характеристикой SINC3 популярны, потому что это имеют нули в точках частотной характеристики, кратных скорости обработки данных. В частности, скорость обработки данных 10 Гц (10 отсчетов в секунду) дает нули на частотах 50 Гц и 60 Гц, что способствует подавлению соответствующих составляющих переменного тока.
До сих пор нами рассматривались только Σ∆-преобразователи, содержащие одноразрядный АЦП (компаратор) и одноразрядный ЦАП (коммутатор). Блок-схема на рис.3.19 представляет многоразрядный Σ∆ АЦП, включающий n-разрядный параллельный (flash) АЦП и n-разрядный ЦАП. Очевидно, эта архитектура дает более широкий динамический диапазон при фиксированных коэффициентах избыточной дискретизации и порядке Σ∆-модулятора. Стабилизация здесь проще, так как могут использоваться Σ∆-модуляторы второго и более высоких порядков. Выходные сигналы, соответствующие паузам во входном сигнале, при использовании данной архитектуры имеют тенденцию к большей степени случайности, благодаря чему, минимизируется шум на выходе.
МНОГОРАЗРЯДНЫЙ
SIGMA-DELTA
АЦП

Реальным недостатком этого метода является то, что линейность всего устройства зависит от линейности ЦАП, и требуется тонкопленочная лазерная подстройка для приближения к уровню 16-разрядной точности. Это делает чрезвычайно трудной в реализации многоразрядную архитектуру, в том числе и архитектуру Σ∆ АЦП.
Тем не менее, в настоящее время она применяется в звуковых Σ∆ ЦАП (AD1852, AD1853, AD1854), где используются специальные методы скремблирования битов для гарантии линейности и устранения шума.
Описанные выше Σ∆ АЦП содержат интеграторы, играющие роль ФНЧ, полоса пропускания которых начинается от 0 Гц, т.е. с уровня постоянного тока. Таким образом, максимум распределения их шума квантования смещен вверх по частоте. В настоящее время по такому принципу построено большинство коммерчески распространенных АЦП (хотя некоторые, предназначенные для использования в звуковых или коммуникационных приложениях, имеют полосовой фильтр вместо ФНЧ для устранения смещения по постоянному току). Нет никакой принципиально непреодолимой причины, по которой фильтры Σ∆-модулятора должны быть непременно низкочастотными, за исключением того, что традиционно АЦП считались низкочастотными устройствами, а интеграторы проще в реализации, чем полосовые фильтры. При замене интеграторов в АЦП полосовыми фильтрами, показанной на рис.3.20, максимумы распределения шумов квантования смещаются вверх и вниз по частоте, так что область, соответствующая полосе сигнала, становится фактически свободной от шумов (см. Приложение 1). Далее, если цифровой фильтр запрограммирован так, что его полоса пропускания находится в этой области, мы получаем полосовой Σ∆ АЦП вместо низкочастотного. Такие устройства полезны для прямого преобразования ПЧ в цифровой код, в устройствах цифровой радиосвязи, ультразвуковых приложениях и других задачах, использующих субдискретизацию. Но в этом случае модулятор и цифровой полосовой фильтр должны
быть разработаны для определенных частот, требуемых данным приложением, что несколько ограничивает гибкость описываемого подхода.
ЗАМЕНА ИНТЕГРАТОРОВ ПОЛОСОВЫМИ ФИЛЬТРАМИ
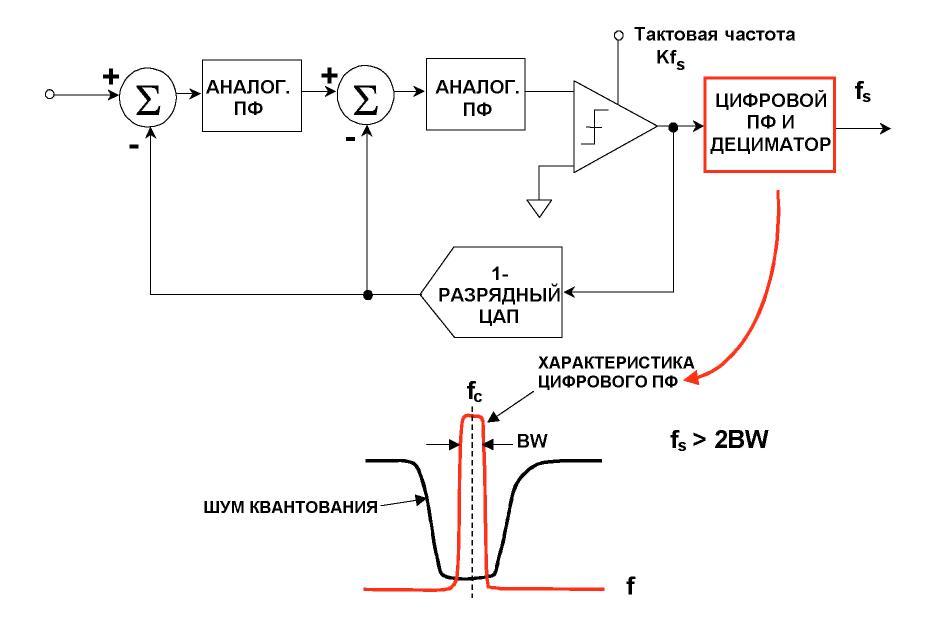
Рис. 3.20
В приложениях, использующих субдискретизацию и полосовые Σ∆ АЦП, минимальная частота дискретизации должна быть, по крайней мере, в два раза больше удвоенной ширины полосы сигнала BW. Сигнал концентрируется вокруг несущей частоты fc.
Типичная цифровая радиосистема, использующая центральную частоту 455 кГц и ширину полосы сигнала 10 кГц, описана в Приложении 1. Частота избыточной дискретизации Kfs = 2 MSPS и выходная скорость потока цифровых данных fs = 20 КSPS обеспечивают динамический диапазон 70 дБ в пределах ширины полосы сигнала.
Большинство Σ∆ АЦП имеют встроенный цифровой фильтр с фиксированными параметрами. Частота среза фильтра и скорость потока выходных данных являются кратными частоте тактового генератора. Модель AD7725 является 16-разрядным Σ∆ АЦП с внутренним программируемым цифровым фильтром. Максимальная частота избыточной дискретизации модулятора составляет 19,2 MSPS. Выход модулятора подключен к КИХ-фильтру с фиксированными параметрами, который осуществляет децимацию данных, поступающих с выхода модулятора, с коэффициентом 8, выдавая выходные данные со скоростью 2,4 MSPS. Выходной сигнал от КИХ-фильтра с фиксированными параметрами подается на программируемый КИХ-фильтр. Загружая ПЗУ подходящими значениями коэффициентов, этот фильтр может быть запрограммирован для реализации желаемой частотной характеристики.
Программируемый фильтр обладает способностью гибко менять число своих коэффициентов и коэффициент децимации. Фильтр может иметь до 108 коэффициентов,
до 5 каскадов децимации и коэффициент децимации в диапазоне от 2 до 256. Точность коэффициентов – 24 разряда, арифметическая точность – 30 разрядов.
Модель AD7725 содержит постпроцессор PuldeDSP™ (торговая марка Systolix) компании Systolix, который позволяет программировать характеристики фильтра через параллельный или последовательный интерфейс микропроцессора. Кроме того, характеристики фильтра могут загружаться при включении/сбросе питания из его внутреннего ПЗУ или из внешнего программируемого ПЗУ.
Постпроцессор является полностью программируемым ядром, которое обеспечивает, мощность обработки до 130 миллионов операций умножения с накоплением (MAC) в секунду. Для программирования постпроцессора пользователь должен создать конфигурационный файл, который содержит настраиваемые данные фильтра. Этот файл может быть сгенерирован компилятором, который поставляется компанией Analog Devices. Компилятор AD7725 воспринимает набор коэффициентов фильтра как исходные данные и автоматически создает необходимый файл.
Файл коэффициентов для характеристики КИХ-фильтра (FIR) может быть сгенерирован с использованием пакетов проектирования цифровых фильтров, таких как QEDesign от Momentum Data Systems. Характеристики фильтра можно вывести на печать, позволяя, таким образом, пользователю ознакомиться с ней перед генерацией коэффициентов фильтра. Процессор осуществляет доступ к данным на скорости 2,4 MSPS. Когда в многокаскадном фильтре используется прореживание, первый каскад фильтра работает с быстродействием 2,4 MSPS, благодаря чему пользователь может выполнять прореживание между каскадами. Количество обслуживаемых процессором сигналов равно 108. Поэтому возможна генерация одного 108-сигнального фильтра или может быть спроектирован многокаскадный фильтр на 108 сигналов. Фильтр может иметь характеристики ФНЧ, ФВЧ, полосового режекторного фильтра или просто полосового фильтра.
Модель AD7725 питается однополярным напряжением +5V, имеет встроенный источник опорного напряжения 2,5V и выполнена в 44-контактном корпусе (PQFP). При работе на полную мощность рассеиваемая энергия равна приблизительно 350 мВт. Имеется режим работы с пониженным потреблением, который позволяет использовать частоту тактового генератора 10 MSPS. Максимальная потребляемая мощность в пассивном режиме составляет 200 мВт. Более подробное описание функционирования AD7725 можно найти в разделе 9.
Резюме
Σ∆ АЦП работает в режиме избыточной дискретизации. В этом режиме простые аналоговые фильтры Σ∆-модулятора формируют кривую распределения шума квантования таким образом, что отношение сигнал/шум (SNR) в заданной полосе пропускания намного больше, чем в других случаях. Благодаря использованию высококачественных цифровых фильтров и дециматора, производится подавление шума за пределами требуемой полосы пропускания. Избыточная дискретизация имеет дополнительный плюс, понижая требования к ФНЧ, применяемому для подавления эффекта наложения спектра. Поскольку аналоговая цепь относительно неприхотлива, ее можно строить с использованием той же цифровой технологии сверхвысокой степени интеграции (VLSI), которая используется для изготовления цифровых фильтров ЦОС. Поскольку основой АЦП является одноразрядный компаратор, применяемая методика является принципиально линейной.
Хотя детальный анализ Σ∆ АЦП затрагивает весьма сложную математику, их основные принципы могут быть поняты без применения математических выкладок. Для дальнейшего обсуждения Σ∆ АЦП Вы можете обратиться к Приложению1-18.