

пособие тмм умо
.pdfсилы разделяют на пять классов в зависимости от их возникновения и воздейст-
вия на машину:
1. Движущие силы Fдс, Мдс, приводящие машину в движение, являются ис-
ходными данными для машин-двигателей. Как правило, их задают в виде индикаторной диаграммы.
2. Силы полезного сопротивления Fпс, Мпс задают для рабочих машин. Зависимость, определяющая закон изменения сил полезного сопротивления, прило-
женных к исполнительному звену, называется механической характеристикой. Например:
Fпс=const (грузоподъемные машины, металлорежущие станки); Fпс= f(V) (вентиляторы, центробежные насосы, гребные винты);
Fпс= f(S) (компрессоры, насосы, прессы);
Fпс= f(t) (камнедробилки, тестомесильные машины, машины химического и неф-
техимического производств);
Fпс= f(S,V) (транспортные машины). 3.Силы вредного сопротивления Fвс, Mвс.
4. Веса звеньев G= m g .
5. Инерционные силы Фи =- m as и моменты сил инерции МФи JS
Силами вредного сопротивления при расчетах в первом приближении пренебрегают.
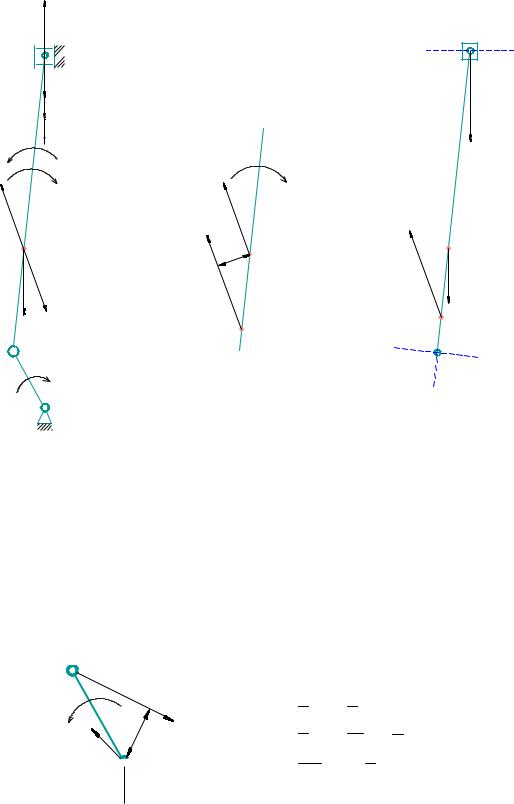
Пример схемы внешних сил для кривошипно-ползунного механизма, кинематика которого рассмотрена во второй лекции (рис. 2.4) представлен на рис. 2.7.
Иногда удобно избавиться от момента сил инерции MФи путем параллельного пе-
реноса главного вектора сил инерции |
|
на плечо h |
|
|
МФи |
, при этом система |
|
Ф |
|||||||
|
|
|
|||||
|
и |
|
|
Фи |
|||
|
|
|
|
|
|||
инерционных нагрузок эквивалентно заменяется одной результирующей силой
ФР , приложенной в точке К (рис. 2.8).
Алгоритм определения реакций для группы Ассура (рис. 2.9) следующий:
1. МВ2 0 R12 ;
2. F 0 R12n R12 Фр2 G2 G3 F B R03 ;
3. F 3 0 R23 G3 F13 R03 .
21
Φu3
R03 В
В 


aВ
G3
F3
εАВ  FПС
FПС
МΦ2
МΦ2 |
Φu2 |
|
|
Φu2 |
|
|
|
S2 |
Φр2 |
S2 |
Φр2 |
aS2 |
|
|
G2 |
G2 |
|
К |
К |
|
|
А |
|
А |
|
|
Rτ12 |
ω1 |
|
|
Rn12 |
О |
|
|
|
Р и с . 2.7. Схема внешних |
Р и с . 2.8. Определение |
Р и с . 2.9. Определение |
|
сил |
результирующей силы |
реакций в группе Ассура |
|
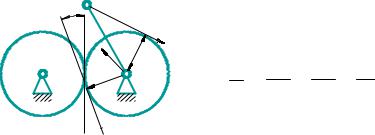
Возможны две схемы присоединения кривошипа к двигателю:
1. Когда двигатель и кривошип совпадают (кривошип прикреплен к выход-
ному валу двигателя)
A
My |
R12 |
R21 |
R12 |
|
|
h |
|||
R01 |
R01 |
R 21 G1 |
||
|







 O
O
M у h R12
 G1
G1
Ри с . 2.10. Схема сил кривошипа
2.Кривошип присоединен к двигателю через редуктор, где rВ – радиус основной окружности.
22
200 A |
R12 |
|
|
|
|
R01 |
h |
|
|
|
|
R |
21 h F y rв |
М |
у |
||
rB |
O |
|
|
|
|
G1 R 01 |
R 21 F у 0 |
|
|||
 Fy
Fy
Р и с . 2.11. Схема сил кривошипа с редуктором
Приведение сил основано на принципе возможных перемещений, согласно которого работа всех внешних сил на соответствующие им элементарные перемещения равна нулю.
Fi dSi cos( F ? S ) M i d i 0 ; (2.35)
Fi Vi M i i 0 .
Если рассматривается рабочая машина, то все силы сопротивления могут быть заменены одной силой или одним моментом, где сила и момент называются приведенными. Мощность этой силы равна сумме мощностей приводимых сил.
Как правило, приведенную силу помещают в т. А кривошипа, а приведенный момент рассматривают относительно т. О.
Fпс VA Fiс Vi Мic 1 Мпс 1 . |
(2.36) |
Для машины-двигателя ситуация рассматривается подобным способом. |
|
Fпd VП Fid Vi M id 1 M пd 1 . |
(2.37) |
Графической интерпретацией принципа возможных перемещений является Рычаг Жуковского, когда на план скоростей, повернутый на 90 градусов вокруг полюса, в соответствующие точки прикладываются все внешние силы. Сумма моментов этих сил вокруг полюса с учетом уравновешивающей равна нулю.
Приведение масс основано на равенстве кинетических энергий.
n |
2 |
|
Jn |
2 |
|
|
2 |
2 |
|
|
|||
T Ti |
|
mП Vn |
|
П |
, |
где Ti |
|
mi Vsi |
|
J si i |
. |
(3.38) |
|
|
|
|
|
|
|||||||||
i 1 |
2 |
2 |
|
|
|
2 |
2 |
|
|
||||
Приведенная масса mп и приведенный момент инерции Jп – это такие фиктив-
ные величины, кинетическая энергия которых равняется сумме кинетических энергий звеньев, составляющих механизм. Приведенную массу обычно приводят в т. А, а приведенный момент – относительно т. О кривошипа.
Перечень вопросов по данной теме (см. рис. 2.7.):
1.На каких принципах или законах основан кинетостатический расчет механизмов?
23
2.На каком принципе или законе основан метод "жесткого рычага" Жуковско-
го?
3.К чему приводятся элементарные силы инерции звена, совершающего рав-
номерное вращательное движение вокруг оси, не проходящей через центр тяжести звена?
4.К чему приводятся элементарные силы инерции звена, совершающего неравномерное вращательное движение вокруг оси, не проходящей через центр тяжести звена?
5.К чему приводятся элементарные силы инерции звена, совершающего
6.плоскопараллельное движение?
7.К чему приводятся элементарные силы инерции звена, совершающего по-
ступательное движение?
8.К чему приводятся элементарные силы инерции звена, совершающего не-
равномерное вращательное движение при совпадении центра тяжести с центром вращения звена?
9.Почему момент сил инерции кривошипа, совершающего равномерное вращательное движение, равен нулю?
10.Что является неизвестным при определении реакции во вращательной паре? 11.Что является неизвестным при определении реакции в поступательной па-
ре?
12.В чем заключается условие статической определимости групп Ассура?
13.В какой последовательности выполняется силовой расчет механизма? 14.Из какого уравнения статики находят реакции во внутренних кинематиче-
ских парах групп Ассура?
15.Какая сила определяется по методу "жесткого рычага" Жуковского?
16.Какие силы являются основными расчетными нагрузками, если сила полезного сопротивления мала, а ускорения звеньев значительны?
17.Как направлен главный вектор сил инерции шатуна АВ? 18.Как направлен главный момент сил инерции шатуна АВ?
19.Каким моментом является уравновешивающий момент?
20.Что не требуется для определения уравновешивающего момента по методу
"жесткого рычага" Жуковского?
21.На каких принципах основано приведение сил?
22.На каких принципах основано приведение масс?
Полностью материал по данной теме изложен в учебниках [1] стр.171-188 [2] стр.186-
223, [3] стр.65-92.
24

2.4. Лекция №4. Динамический анализ механизмов
Рассмотрим гипотетический кривошип. Угол поворота кривошипа является
обобщенной координатой. На кривошип действует приведенный момент Мп он сам обладает моментом инерции Jп, и имеет угловую скорость (рис.2.12).
 Y
Y
Mn, In ω1
φ
Х
Ри с . 2.12. Динамическая модель машины с одной степенью свободы
Врассматриваемом положении дифференциал кинетической энергии кривошипа равен дифференциалу работ всех внешних сил:
dT=dA. |
(2.39) |
|
dA=Мп . d ; |
dT=d(Jп . 2/2). |
|
Отсюда |
|
|
Мп=dJп/d . 2/2+d /dt .Jп. |
(2.40) |
|
Это уравнение движения машинного агрегата в дифференциальной форме.
Частные случаи:
Мп=const, Jп=const. |
Мп= .Jп; |
(2.41) |
||||||
|
|
Мп( ), Jп( ). |
|
|||||
T= А=T-Tн=Jп. 2/2-Jпн. н2/2. |
(2.42) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
2 A |
|
J |
2 |
|
||
|
|
|
|
пн н |
, |
(2.43) |
||
Jп |
|
|
||||||
|
|
|
|
Jп |
|
|||
где Т, Jп, - текущие значения,
Tн, Jпн, н – начальные значения.
Анализ уравнения (2.43) позволяет сделать вывод о том, что угловая скорость кривошипа является функцией обобщенной координаты, то есть меняется в пределах одного цикла. Определение этой закономерности является важнейшей зада-
чей анализа механических систем.
В этом свете задача конструктора – создать машину, у которой колебания уг-
ловой скорости кривошипа будут сведены к минимуму.
25
ω |
II |
III |
I |
||
|
|
ωmax |
|
|
ωc |
|
|
ωmin |
|
|
t |
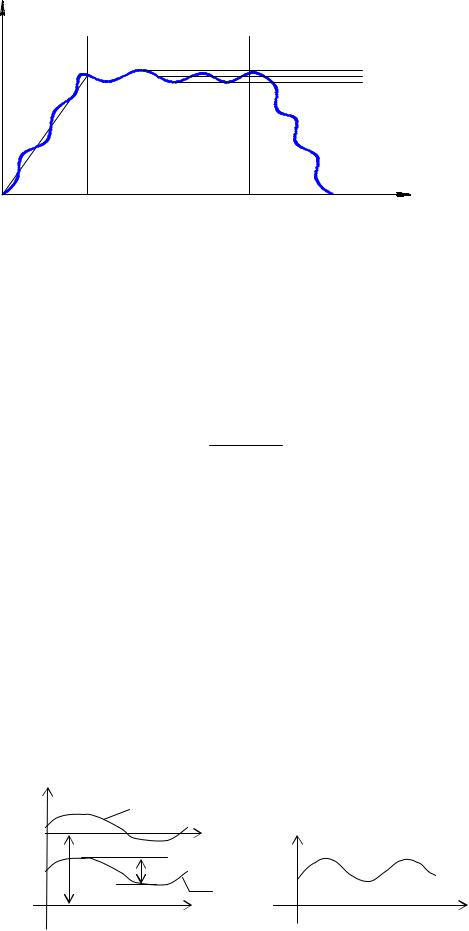
Р и с . 2.13. Стадии работы машинного агрегата.
I – разгон Адц>Асц, когда работа движущих сил за цикл больше работы сил сопро-
тивления; II – стадия установившегося движения при Адц=Асц; III – выбег или останов для Адц< Асц.
На стадии установившегося движения вводится коэффициент неравномерности вращения .
|
max min |
, |
(2.44) |
|
c
где c max min .
2
Вычисление момента инерции кривошипа на стадии установившегося движения удобно производить методом Мерцалова. Кинетическую энергию машины Т представляют в виде суммы двух слагаемых
Т Т I ТII |
J ПI 2 |
|
J ПII 2 |
, |
(2.45) |
|
|
|
|||||
|
2 |
2 |
|
|
||
где ТI – кинетическая энергия звеньев, приведенный момент инерции которых JПI |
||||||
постоянен. |
|
|
|
|
|
|
ТII – кинетическая энергия звеньев, приведенный момент инерции которых J ПII пе- |
||||||
ременен. |
А Тн Т II . Предположим, что известны А , |
|||||
Ввиду того, что Т А Тн , то Т I |
||||||
Т II . |
|
|
|
|
|
|
T |
А, Т |
|
|
|
|
|
φTII
TН |
TI |
I |
|
T |
|||
|
|
φ
φ
Р и с . 2.14. Метод Мерцалова
26

Искомая величина ТI зависит только от конфигурации кривой и не зависит от Тн.
Т |
IПI max2 |
|
IПI min2 |
I |
ПI c2 . |
(2.46) |
||
|
|
|
|
|||||
2 |
2 |
|
|
|
|
|||
|
I ПI |
Т I |
. |
|
(2.47) |
|||
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
c |
|
|
|
|
Порядок решения:
1.Приведение сил и моментов и построение диаграмм суммарного приведенного момента МПС( ).
2.После интегрирования вычисляется работа
2 |
(2.48) |
Ac M ПСd |
|
0 |
|
3.Приведение масс и определение IПII и Т II .
4.Построение диаграммы Т I .без численного выявления положения сдвинутой оси абсцисс.
5.Подсчет IПI .
Примечания:
Маховик выполняет роль периодического регулятора только на стадии установившегося
движения, когда Ац=0 и с=const.
Решение приведено для МПd=const.
Колебания скорости входного звена при некоторых условиях выходят за пре-
делы периодического изменения, например, при внезапных скачках или сбросе нагрузки, изменении подводимой энергии, пуске, торможении и т.д.
Основной элемент саморегулирующих систем является обратная связь – устройство, передающее часть выходной координаты на вход объекта регулирования.
|
|
Вход |
|
|
|
Выход |
|
|||
1 |
|
РО |
|
2 |
|
ИО |
|
3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
СУ |
|
|
|
|
СОС |
|
||
|
|
|
4 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р и с . 2.15. Блок-схема регулирования по замкнутому контуру 1 – источник энергии; 2 – двигатель – управляемый объект; 3 – потребитель энергии; 4 –
регулятор; РО – регулирующий орган; ИО – исполнительный орган; СОС – сигналы обратной связи; СУ – сигналы управления.
27
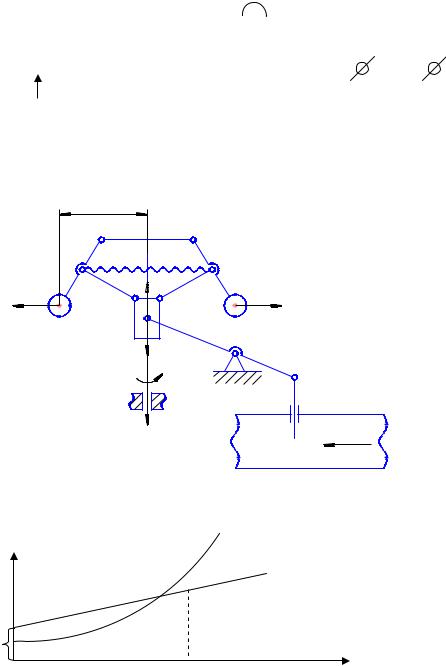
Регулятор – устройство, измеряющее отклонение регулируемого параметра и вырабатывающее воздействие, величина которого зависит от измеренного отклонения параметра. В качестве параметра рассмотрено регулирование угловой скорости электрогенератора (рис. 2.16).
|
|
|
|
|
|
|
|
Регулятор |
|
СУ |
||||||
|
|
|
|
|
|
|
|
4 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Паровая |
|
|
|
|
|
|
|
|
СОС |
|
|
|
|
|
|
|
турбина |
|
|
|
|
|
Электрогенератор |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
РО |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Заслонка |
|
|
|
|
|
|
|
Адв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ИО |
|
|
|
|
|
|
|
|
|
|
Ас |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1Пар
Ри с . 2.16. Регулирование угловой скорости электрогенератора
|
|
X |
|
|
А |
|
А |
|
В |
|
В |
Fu |
|
Fuп |
Fu |
С |
|
||
|
|
С |
|
|
m |
|
m |
|
|
Gп |
|
|
|
ω |
|
|
|
Fuп |
|
|
|
Пар |
|
Р и с . 2.17. Центробежный регулятор |
|
|
|
Fu |
|
F |
Fuп |
|
|
|
Gп |
ωр |
х, ω |
Р и с . 2.18. Зависимость сил от угловой скорости
28

F 0 Fи Gп Fuп - сумма сил в регуляторе (рис. 2.17.),
где Fи= 2 f ( y )- сила инерции от центробежных противовесов; Gп const - сила тяжести груза;
Fип= f(y) – усилие пружины.
Перечень вопросов по данной теме:
1.Что такое динамическая модель машины?
2.Назовите стадии работы машинного агрегата.
3.Почему угловая скорость кривошипа на стадии установившегося движения непостоянна?
4.Как оценивается коэффициент неравномерности вращения?
5.Для чего необходим маховик?
6.Возможна ли работа машины без маховика?
7.Назовите причину возникновения непериодических колебаний начального звена.
8.Нужна ли в машине обратная связь?
9.Может ли регулятор заменить маховик?
Полностью материал по данной теме изложен в учебниках [1] стр.126-188, [2] стр.101-
223, [3] стр.65-108.
2.5. Лекция №5. Виброзащита машин. Уравновешивание.
Машинный агрегат можно представить в виде следующей схемы:
С
U |
O |
(U) – источник, в котором происходят физические процессы, вызывающие колебания.
(О) – объект виброзащиты – часть машины, колебания которой уменьшают. (С) – силовые механические воздействия, которые делятся на:
1.Линейные перегрузки при ускорениях (транспортные машины).
2.Вибрационные воздействия - силовые F(t), M(t) и кинематические a(t), V(t),
S(t).
3. Ударные, зависящие от формы удара, как правило - это внештатная ситуа-
ция.
Влияние механических воздействий на объекты и человека:
- нарушение нормального функционирования при линейных перегрузках;
29
-при вибрационном воздействии возникают усталостные повреждения;
-вибрационные нагрузки являются генераторами шума и приводят к нарушению технологических допусков.
Допустимые для человека динамические воздействия регламентируются санитарными нормами. Цель виброзащиты объектов – повышение выбропрочности и виброустойчивости.
Основными методами выброзащиты являются:
-уменьшение активности источника с помощью статического уравновешивания механизмов на фундаменте и уравновешивания роторов;
-изменение конструкции объекта: устранение резонансных явлений, диссипация механической энергии, демпфирование;
-динамическое гашение колебаний, т.е. создание дополнительных колебаний (гаситель), уравновешивающих источник;
-виброизоляция – ослабление связей (С) между (U) и (О).
Статическое уравновешивание различных механизмов необходимо для ос-
лабления динамических нагрузок подвижных частей машины на ее фундамент. Инерционные нагрузки, возникающие в механизме можно представить в виде
главного вектора сил инерции ФS и главного момента МФs приведенных к одной
точке, например, к центру масс, S (рис. 2.19). |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сonst ; |
(2.49) |
||||
|
|
|
|
|
|
|
|
ФS |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Const . |
(2.50) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МФS |
||||||||
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
||||||
|
|
А |
|
|
|
Если соблюдается условие (2.49), то |
||||||||||||||||
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
механизм называется статически уравно- |
||||||
|
О |
|
M |
|
|
|
|
|
В |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
вешенным, если условие (2.50) |
– мо- |
|||||||||
|
|
|
S |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ментно-уравновешенным, если (2.49) и |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.50), то полностью уравновешенным. |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Р и с .2.19. Система инерционных сил |
|||||||||||||||||||||
|
Для статического уравновешивания нуж- |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
но соблюсти условие аS 0 , т.е. |
ускоре- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ние центра масс равно нулю, что дости- |
||||
гается установкой его в точку |
О. При этом |
|
|
0 . Решение возможно |
||||||||||||||||||
ФS ma |
||||||||||||||||||||||
при помощи двух противовесов, один из которых устанавливают на шатун, а другой на кривошип.
Массу шатуна разнесем по шарнирам А и В. На продолжении шатуна уста-
навливается противовес mп2 на расстоянии lп2 от точки А, чтобы переместить центр масс звеньев 2 и 3 в точку А.
30