

Lash_r7
.pdfКолебания скорости входного звена при некоторых условиях выходят за пределы периодического изменения, например, при внезапных скачках или сбросе нагрузки, изменении подводимой энергии, торможении и др.
Основным элементом саморегулирующихся систем является устройство обратной связи, передающее часть выходной координаты на вход объекта регулирования (рис. 2. 15).
|
|
Вход |
|
|
|
Выход |
|
|||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
РО |
|
2 |
|
ИО |
|
3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
СУ |
|
|
|
|
СОС |
|
||
|
|
|
4 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р и с. 2.15. Блок-схема регулирования по замкнутому контуру: 1 –
источник энергии; 2 – двигатель-управляемый объект; 3 – потребитель энергии; 4 – регулятор; РО – регулирующий орган; ИО – исполнительный
орган; СОС – сигналы обратной связи; СУ – сигналы управления.
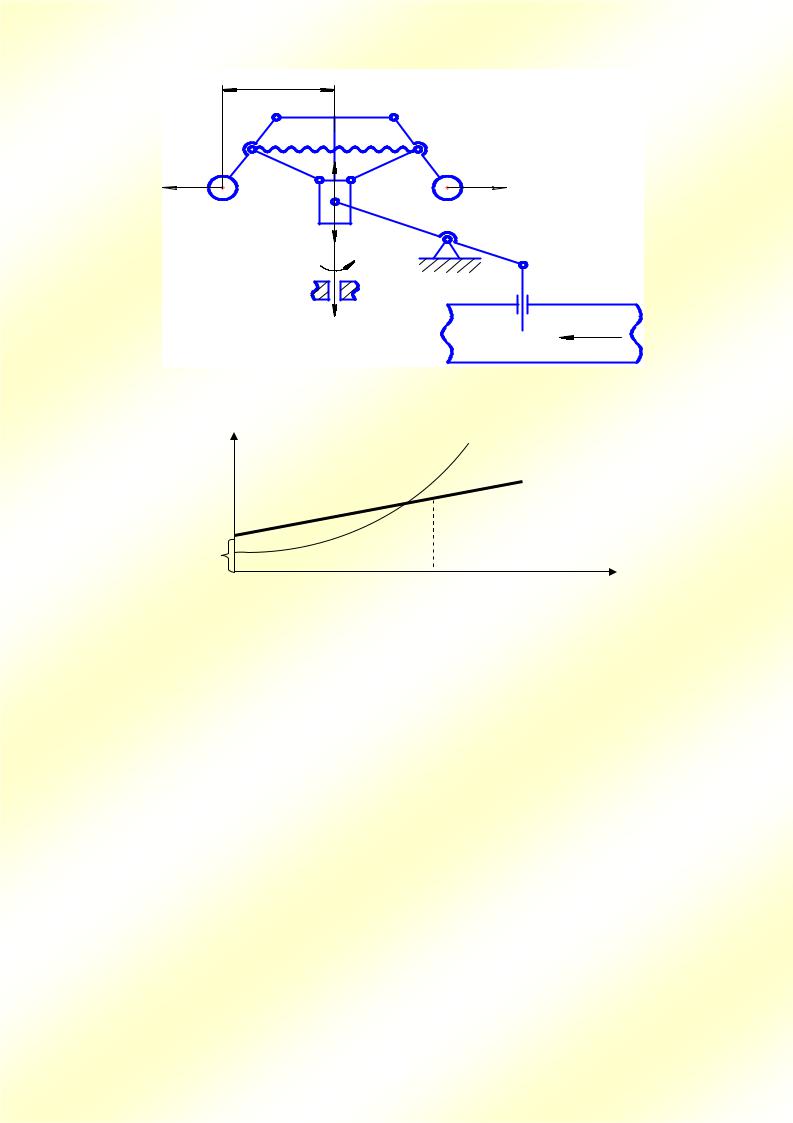
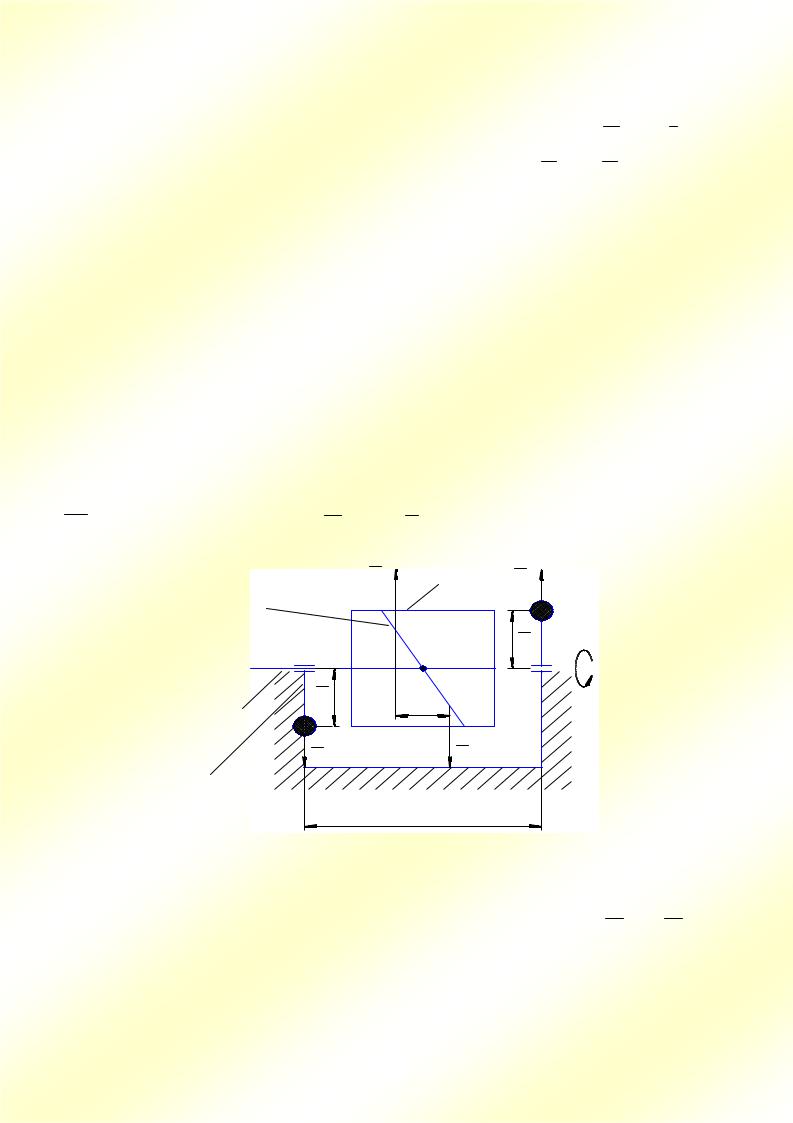
Регулятор – устройство, измеряющее отклонение регулируемого параметра и вырабатывающее воздействие, величина которого зависит от измеренного отклонения параметра. В качестве примеров приведены схема регулирования угловой скорости электрогенератора (рис. 2.16) и центробежный регулятор (рис. 2.17).
F 0 Fи Gп Fuп - сумма сил в регуляторе (см. рис. 2.17),
|
|
|
|
Регулятор |
СУ |
|||||
|
|
|
|
4 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Паровая |
|
|
|
|
|
|
СОС |
турбина |
|
|
|
|
|
Электрогенератор |
|||
|
|
|
|
|||||||
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
|
|
|
|||||
ω РО
Заслонка Адв
ИО |
Ас |
1Пар
Ри с . 2.16. Регулирование угловой скорости электрогенератора
30
|
|
X |
|
|
А |
|
А |
|
В |
|
В |
Fu |
|
Fuп |
Fu |
С |
|
||
|
|
С |
|
|
m |
|
m |
|
|
Gп |
|
|
|
ω |
|
|
|
Fuп |
|
Р и с. 2.17. Центробежный регулятор
F |
Fu |
|
Fuп
Gп
ωр х, ω
Р и с. 2.18. Зависимость сил от угловой скорости
Здесь Fи= 2 f( y )- сила инерции от центробежных противовесов;
Gп const – сила тяжести груза;
Fип= f(y) – усилие пружины.
Контрольные вопросы
1.Что такое динамическая модель машины?
2.Назовите стадии работы машинного агрегата.
3.Почему угловая скорость кривошипа на стадии установившегося движения непостоянна?
4.Как оценивается коэффициент неравномерности вращения?
5.Для чего необходим маховик?
6.Возможна ли работа машины без маховика?
7.Назовите причину возникновения непериодических колебаний звена.
8.Нужна ли в машине обратная связь?
31
Лекция 5. Виброзащита машин
Машинный агрегат можно представить в виде следующей схемы:
где
С
U O
(U) – источник, в котором происходят физические процессы, вызывающие колебания;
(О) – объект виброзащиты – часть машины, колебания которой уменьшают;
(С) – силовые механические воздействия.
Силовые механические воздействия делятся на виды:
1.Линейные перегрузки при ускорениях (транспортные машины).
2.Вибрационные воздействия – силовые F(t), M(t) и кинематические a(t), V(t), S(t).
3.Ударные, зависящие от формы удара, как правило – это внештатная ситуация.
Влияние механических воздействий на объекты:
нарушение нормального функционирования при линейных перегрузках;
при вибрационном воздействии возникают усталостные повреждения;
вибрационные нагрузки являются генераторами шума и приводят к нарушению технологических допусков.
Цель виброзащиты объектов – повышение выбропрочности и виброустойчивости.
Основными методами виброзащиты являются:
уменьшение активности источника с помощью статического уравновешивания механизмов на фундаменте и уравновешивания роторов;
изменение конструкции объекта: устранение резонансных явлений, диссипация механической энергии, демпфирование;
динамическое гашение колебаний, т.е. создание дополнительных колебаний (гаситель), уравновешивающих источник;
виброизоляция – ослабление связей (С) между (U) и (О).
32
Статическое уравновешивание различных механизмов необходимо для ослабления динамических нагрузок подвижных частей машины на ее фундамент.
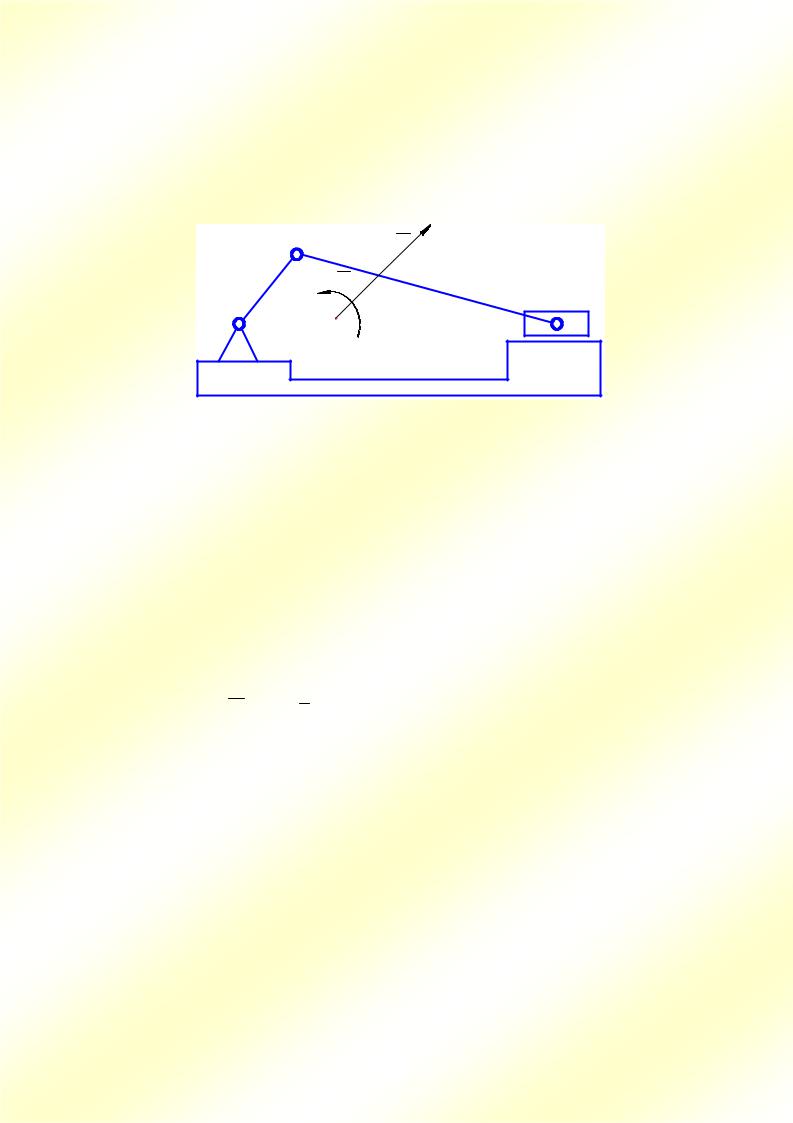
Инерционные нагрузки, возникающие в механизме можно представить в виде главного вектора сил инерции ФS и главного момента МФs приведенных к одной точке, например, к центру масс, S (рис. 2.19).
Аs
M S
В
О
S
Р и с. 2.19. Система инерционных сил |
|
||||
|
|
|
Сonst ; |
|
|
ФS |
(2.49) |
||||
|
|
Const . |
|
||
МФS |
(2.50) |
||||
Если соблюдается условие (2.49), то механизм называется статически уравновешенным, если условие (2.50) – моментно-уравновешенным, если (2.49) и (2.50), то полностью уравновешенным.
Для статического уравновешивания нужно соблюсти условие аS 0,
т.е. ускорение центра масс равно нулю, что достигается установкой его в точку О. При этом ФS ma0 . Решение возможно при помощи двух противо-
весов, один из которых устанавливают на шатун, а другой на кривошип. Массу шатуна разносят по шарнирам А и В. На продолжении шатуна
устанавливается противовес mп2 на расстоянии lп2 от точки А, чтобы пере-
местить центр масс звеньев 2 и 3 в точку А. |
|
mп2 lп2 (m2 Jas2 m3 Jab). |
(2.51) |
Для помещения центра масс в точку О устанавливают второй противо- |
|
вес на кривошип (рис. 2.20) |
|
mп1 lп1 m1 OS1 (m2 m3 mП2) ОА. |
(2.52) |
33
mn2 |
ln2 А |
|
О |
S2 |
В |
|
ln1
mn1
Р и с. 2.20. Статическое уравновешивание механизма
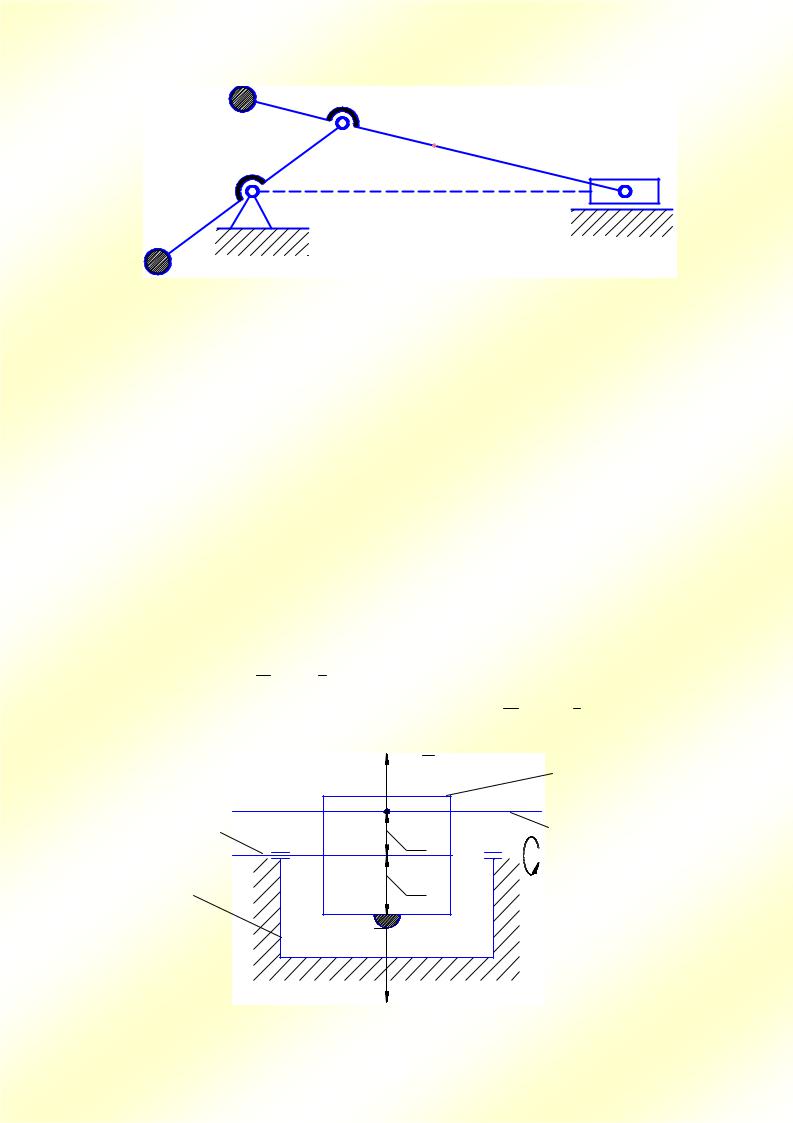
Для вращающихся роторов уравновешивание (балансировка) является необходимой технологической операцией. Ротор – тело любой геометрической формы, которое при вращении удерживается своими несущими поверхностями в опорах. Ось ротора – прямая, соединяющая центры поперечных сечений несущих поверхностей ротора.
Неуравновешенность ротора – состояние ротора, характеризующееся таким распределением масс, при котором в опорах возникает знакопеременная нагрузка. Виды неуравновешенностей: статическая, моментная, динамическая.
Статическая неуравновешенность – это состояние ротора, при кото-
ром его ось и центральная ось инерции параллельны, т.е. центр масс ротора смещен от его оси на величину ест статическое, что вызывает возникно-
вение силы инерции Фи meст 2 . Величину неуравновешенности оцени-
вают главным вектором статического дисбаланса Dст meст (рис. 2.21.).
|
Dсm |
Ротор |
|
Ось |
|
||
|
Главная |
||
вращения |
|
||
|
центральная |
||
ротора |
eст |
||
ось инерции |
|||
|
|||
Рама |
eк |
=const |
|
|
mк |
Dк |
Р и с. 2.21. Статическая неуравновешенность ротора
34
Для устранения статической неуравновешенности по линии действия
Dст устанавливают корректирующую массу mk на расстояние ek от оси вращения. Эта корректирующая масса создает дисбаланс Dk mek . Для статического уравновешивания необходимо, чтобы Dk Dст , при этом можно задаться величиной mk и определить ek , или задаться ek и найти mk . В результате уравновешивания главная центральная ось инерции должна совпасть с осью вращения.
Моментная неуравновешенность характеризуется тем, что центр масс ротора расположен на оси его вращения, главная центральная ось инерции повернута относительно оси вращения на некоторый угол.
Моментная неуравновешенность проявляется только при вращении ротора, в виде биения в опорах, при этом возникает динамический момент
МД DД lД . Для устранения моментной неуравновешенности выбирают в произвольном месте две корректирующие плоскости. Выбор осуществляют так, чтобы одна из них проходила через опору А, другая – через опору В
Dk |
mek в обоих плоскостях MК lК DК (рис. 2.22). |
||||
|
Главная |
DД |
|
Ротор |
DК |
|
|
|
|
|
|
|
центральная |
|
m |
|
mк |
|
ось инерции |
|
|
eк |
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
Ось |
eк |
lд |
m |
=const |
|
вращения |
|
|
|
|
|
ротора |
mк |
|
DД |
|
|
Рама |
DК |
|
|
|
|
|
|
|
|
|
|
|
|
lД |
|
|
|
Рис. 2.22. Моментная неуравновешенность ротора |
||||
Для моментного уравновешивания необходимо, чтобы Mk MД . Та-
ким образом, для устранения моментной неуравновешенности необходимо иметь две корректирующие массы, которые размещают в 2-х корректирующих плоскостях.
35
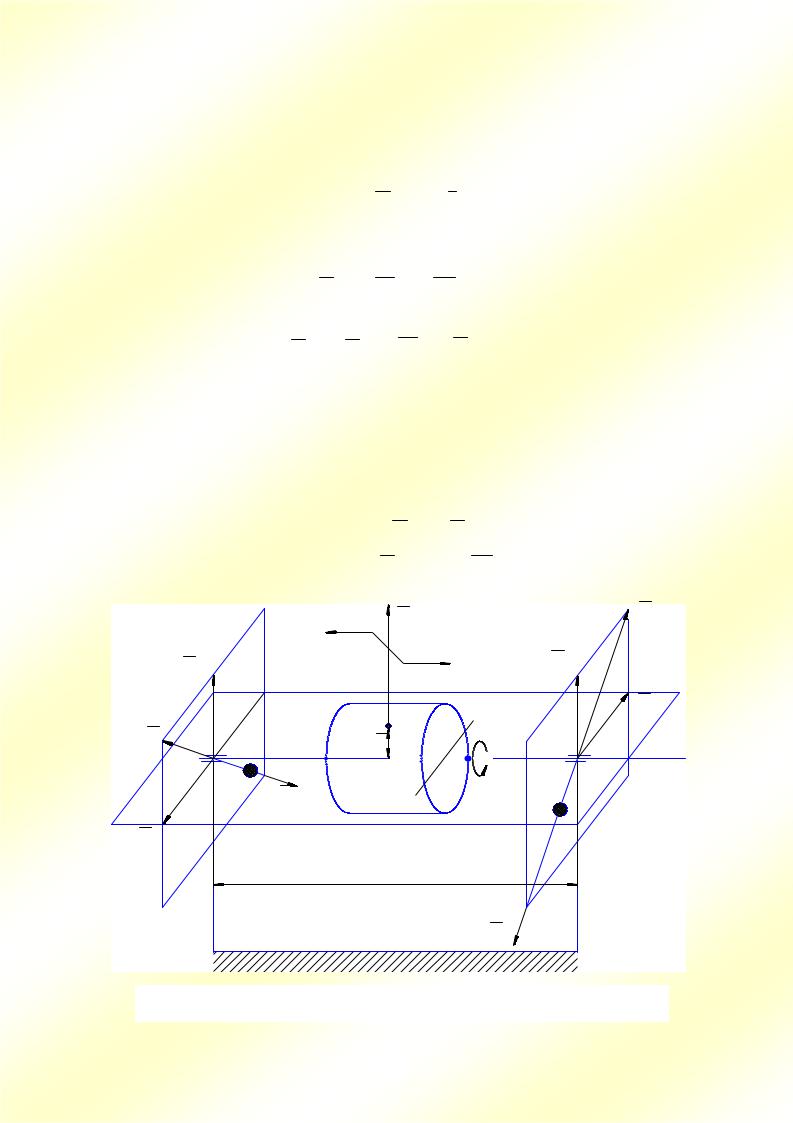
Динамическая неуравновешенность является общим случаем не-
уравновешенности ротора, а именно, имеет место как статическая, так и моментная неуравновешенности. При этом центр масс ротора не лежит на оси вращения, и главная центральная ось инерции повернута на угол относительно оси вращения.
Dст meст |
(2.53) |
Выберем в произвольном месте две корректирующие плоскости (опоры А и В рис. 2.23). Вектор дисбаланса разнесем по этим плоскостям так, чтобы
DСТ D СТ D СТ .
Динамический момент представим в виде пары сил |
|
DД1 DД11; МД DД lД ; lД lАВ . |
(2.54) |
Уравновешивание осуществляется в каждой плоскости отдельно. В первой плоскости находим результирующий вектор дисбаланса. Для урав-
новешивания D1необходимо на линии его действия установить корректи-
рующую массу mk1 на расстоянии ek1 так, чтобы она создавала дисбаланс корректирующей массы в первой плоскости
|
|
D1 Dk1 |
(2.55) |
|
|
|
Dk1 mk1 |
ek1 |
(2.56) |
|
|
Dст |
|
DII |
|
DсmI |
МД |
|
DсmII |
|
|
|
||
|
|
|
|
|
|
|
|
|
DДII |
DI |
A |
e |
|
B |
|
mкI |
DкI |
=const mкII |
|
|
|
|
|
|
DДI |
|
|
|
|
|
|
IД |
|
|
|
|
|
DкII |
|
|
Р и с. 2.23. Динамическая неуравновешенность ротора |
|||
36
Во второй плоскости
(2.57)
(2.58)
Динамическая неуравновешенность устраняется путем установки двух корректирующих масс в двух корректирующих плоскостях. При этом дисбаланс корректирующих масс в первой и во второй плоскостях неравные и непараллельные.
Контрольные вопросы
1.Чем обусловлена вибрация машин?
2.Какова цель виброзащиты машин?
3.Чем регламентируются допустимые механические воздействия на технические объекты?
4.Как влияют вибрационные воздействия на технические объекты?
5.Перечислить основные методы виброзащиты.
6.Что называется статической неуравновешенностью ротора?
7.Какой ротор является статически уравновешенным?
8.Что является моментной неуравновешенностью ротора?
9.Что является динамической неуравновешенностью ротора?
Более подробно материал по данной теме изложен в пособии [2] на стр.248-296.
 Вопросам вибрации машин посвящены следующие ви-
Вопросам вибрации машин посвящены следующие ви-
деофрагменты мультимедийного пособия:
Прогиб валов и критическая частота вращения;
Причины прогибов и вибраций;
Низкочастотная балансировка роторов.
Для их просмотра щелкните ЗДЕСЬ по соответствующему заголовку раздела.
37
Лекция 6. Проектирование зубчатых передач
Высшая кинематическая пара, образуемая последовательно взаимодействующими поверхностями зубьев, называется зубчатым зацеплением. Синтез зацепления состоит в отыскании геометрического сопряжения поверхностей по заданному закону их относительного движения.
Теорема Виллиса. Для обеспечения постоянного передаточного отношения угловых скоростей U21= 2/ 1, сопрягаемые поверхности должны иметь общую нормаль и проекции скоростей на нее должны совпадать. Существует множество кривых высших порядков отвечающих требованию теоремы Виллиса, в частности, эвольвентное зубчатое зацепление.
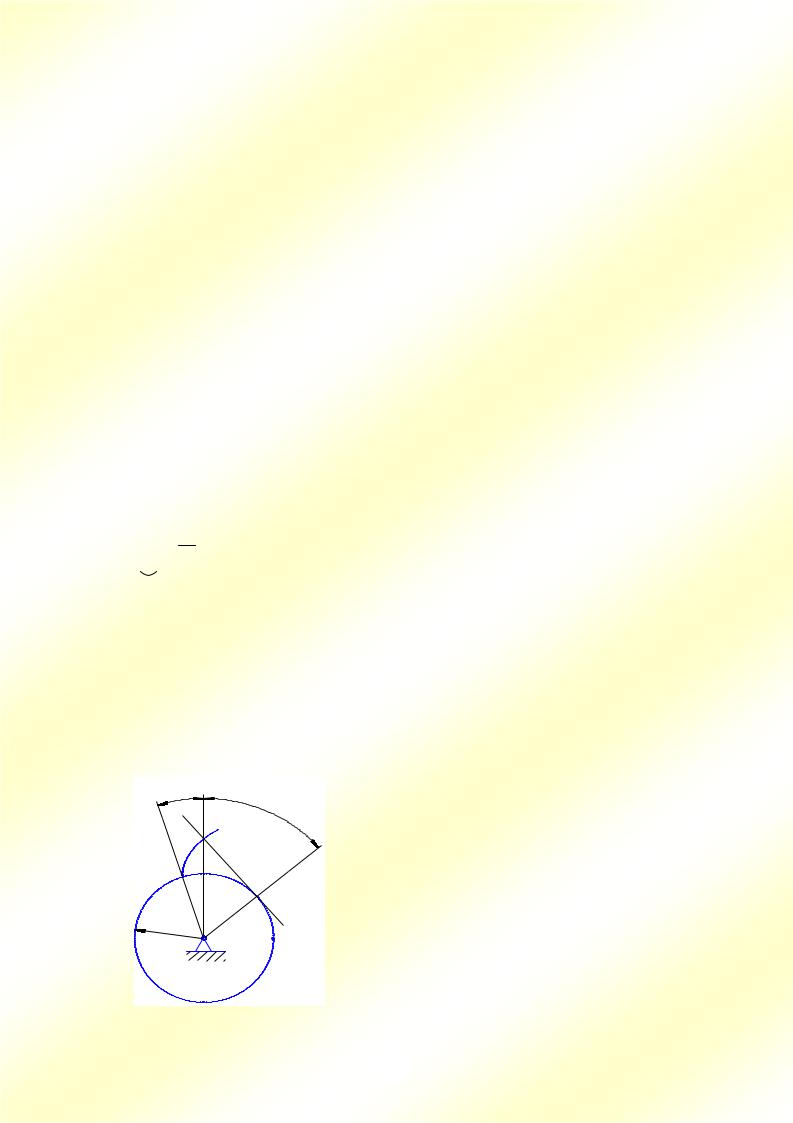
Основные преимущества эвольвентного зацепления: простота проектирования и изготовления, технологичность, взаимозаменяемость, автоматизация массового производства. Эвольвента – это кривая, образуемая точкой прямой, которая катится по окружности без скольжения. Радиус этой окружности называется основным и обозначается rb.
Свойства эвольвенты:
1.Единственным параметром является радиус основной окружности.
2.Нормаль к эвольвенте является касательной к этой окружности.
3.ac bc (рис. 2.24).
Отметим, что ac=rb( + ); bc=rbtg ; соответственно + =tg ;
=tg - =inv – эвольвентная функция (инволюта). Эта функция используется для определения профиля зубьев.
Геометрия прямозубого эвольвентного нулевого колеса
Введём понятие делительной окружности. Это окружность стандартного шага Р, по которой расстояние между соседними зубьями равно шагу инструмента. Радиус делительной ок-
θ |
α |
ружности |
обозначается – r, модуль |
||
τ |
|
зацепления – m. |
|
||
b |
|
|
|||
|
. |
. |
m. |
||
|
|
rB=r |
cos20 ; P= |
||
а |
с |
Если z – число зубьев колеса, то |
|||
|
r =mz/2. |
|
|
||
Rв |
τ |
|
|
||
Высота зуба – h = ra-rf , где ra – |
|||||
|
|
||||
|
|
радиус окружности вершин; rf – ради- |
|||
|
|
ус окружности впадин. |
|
||
|
|
Высота головки зуба – ra-r =ha, ha. |
|||
Р и с. 2.24. Свойства эвольвенты |
|
|
|
||
38
Высота ножки зуба – rf-r =hf, hf
h=ha+hb; ha=ha*.m; hf=hf*.m; ha*=1; hf*=1.25,
где ha* - коэффициент высоты головок; hf* - коэффициент высоты ножки.
Все размеры зубчатого колеса и зуба определяются модулем m. Форма зуба определяется радиусом основной окружности rb.
Методы нарезания зубчатых колес
Метод копирования. Инструмент имеет профиль, соответствующий впадине между двумя зубьями. Этот метод является неточным, поскольку он связан с точностью станка и геометрией инструмента. В то же время он наиболее экономичен (применим в массовом производстве – протяжка, волочение, точное литье).
Метод обкатки. Имитируется зацепление двух колес. При этом необходимы три движения: 1) резания; 2) подачи – приближение заготовки к инструменту; 3) обкатки – совместное движение инструмента и заготовки.
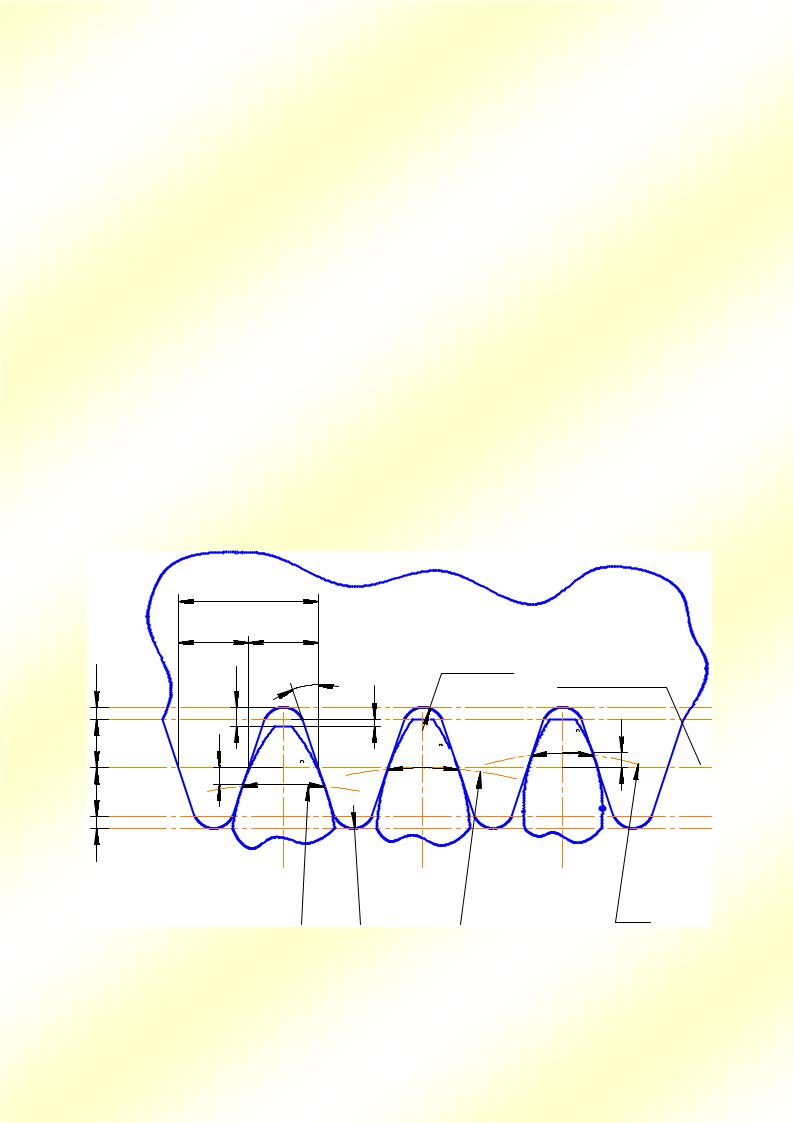
Если представить, что радиус инструментального колеса приближается к бесконечности, то получим инструментальную рейку (рис. 2.25).
|
Р=πm |
|
|
πm/2 |
πm/2 |
c*m |
ca |
|
|
|
ym |
h*am |
хm |
|
h*am |
|
S |
|
|
|
c*m |
|
|
P0=0,38m
S 

r P0=0,38m r
Делительная
прямая
хm |
S |
r
|
|
|
|
|
|
|
|
x 0; S m/2 |
x=0; S= m/2 |
x 0; S m/2 |
|||||
Р и с. 2.25. Инструментальная рейка: c*m – радиальный зазор; хm –
смещение инструмента; ym – укорочение зуба, нарезанного со смещением по отношению к нулевому
39