

Лабораторная работа №3 Исследование динамических нагрузок в механизме опрокидывания конвертера
Цель работы: исследовать динамические процессы в приводе механизма опрокидывания конвертера, экспериментально и аналитически определить уровень и характер изменения динамических нагрузок в приводе механизма опрокидывания конвертера.
Теоретические положения
С достаточной для практических расчетов точностью исследование динамических процессов в приводе механизма опрокидывания конвертера можно проводить по приведенной двухмассовой системе с одной степенью свободы (рис. 3.1). Приведение нагрузок и параметров в данном случае будем осуществлять к валу механизма поворота конвертера.
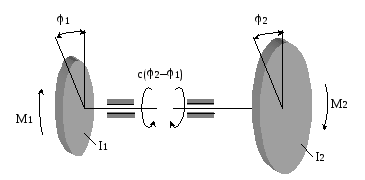
Рисунок 3.1 – Расчетная схема механизма опрокидывания конвертера
Уравнения движения системы имеют вид:
![]() ()
()
где
![]() – углы поворота масс
– углы поворота масс![]() ,
,![]() ;
;
![]() –момент электродвигателя,
–момент электродвигателя,
![]() ;
;
![]() –момент опрокидывания
конвертера,
–момент опрокидывания
конвертера,
![]() ;
;
c –
коэффициент жесткости,
![]() .
.
Момент опрокидывания конвертера
![]() определится как функция от угла поворота
корпуса конвертера
определится как функция от угла поворота
корпуса конвертера![]() (рис. 3.2):
(рис. 3.2):
![]() , ()
, ()

Рисунок 3.2 – Расчетная схема
к определению приведенного момента
опрокидывания конвертера
![]() и тарировочного момента
и тарировочного момента![]()
где
![]() – вес корпуса конвертера и садки
(определяется расчетом),
– вес корпуса конвертера и садки
(определяется расчетом),![]() ;
;
a– расстояние от оси поворота до центра тяжести корпуса конвертера и садки (определяется расчетом);
![]() –угол наклона корпуса
конвертера от вертикальной оси,
–угол наклона корпуса
конвертера от вертикальной оси,
![]() ;
;
![]() –угловая скорость поворота
корпуса конвертера,
–угловая скорость поворота
корпуса конвертера,
![]() ;
;
![]() –угловая скорость вращения
электродвигателя,
–угловая скорость вращения
электродвигателя,
![]() ;
;
n – частота вращения ротора электродвигателя (n=960 об/мин);
U – передаточное отношение редуктора (U=300).
Момент
![]() создается электродвигателем механизма
опрокидывания конвертера:
создается электродвигателем механизма
опрокидывания конвертера:
![]() , ()
, ()
где
![]() – мощность электродвигателя (
– мощность электродвигателя (![]() =2,5кВт);
=2,5кВт);
![]() –к.п.д. передач (
–к.п.д. передач (![]() =0,6).
=0,6).
Совместное решение системы уравнений
()и () с учетом зависимости () дает исходное
дифференциальное уравнение для
определения относительного угла
закручивания
![]() :
:
![]()
или ![]() , ()
, ()
где
![]() – собственная частота колебаний системы.
– собственная частота колебаний системы.
Решение дифференциального уравнения ():
![]() . ()
. ()
Постоянные интегрирования
![]() и
и![]() определяются из начальных условий:
определяются из начальных условий:
![]() . ()
. ()
В результате относительный угол поворота
![]() составит:
составит:
![]() , ()
, ()
а величина восстанавливающего момента в упругой связи будет определяться выражением
![]() . ()
. ()
Коэффициент динамичности системы
 . ()
. ()
Рассмотренные зависимости ()–() позволяют с достаточной для практических расчетов точностью приближения исследовать динамические нагрузки в вале привода механизма поворота конвертера.
Жесткость вала cможно определить по формуле ().
Приведенные моменты инерции масс:
![]() ; ()
; ()
![]() , ()
, ()
где
![]() – момент инерции ротора электродвигателя
(
– момент инерции ротора электродвигателя
(![]() );
);
![]() –момент инерции корпуса
конвертера и садки относительно оси
его поворота (определяется расчетом),
–момент инерции корпуса
конвертера и садки относительно оси
его поворота (определяется расчетом),
![]() ;
;
![]() –масса корпуса конвертера
и садки (определяется расчетом),
–масса корпуса конвертера
и садки (определяется расчетом),
![]() .
.
Лабораторное оборудование
Установка для проведения лабораторной работы содержит в себе действующую модель конвертера 1 с тензометрическими датчиками 2 на вале 3 конвертера, тензостанцию с осциллографом 4 (рис. 3.3).
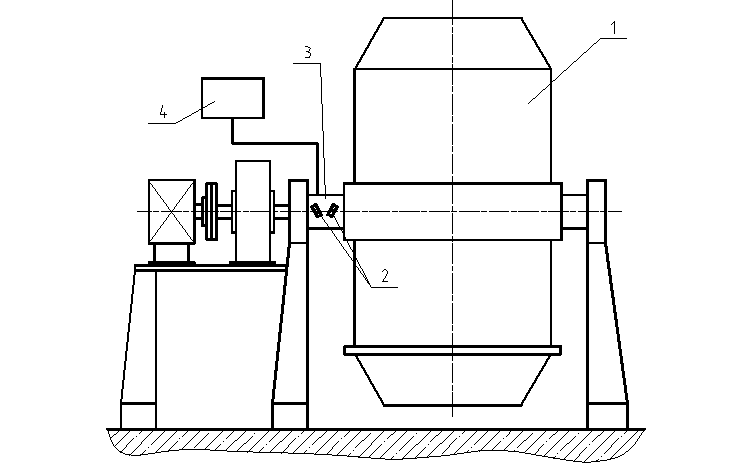
Рисунок 3.3 – Схема лабораторной установки
Порядок выполнения работы
Проверить готовность измерительной аппаратуры.
Произвести тарировку тензометрической аппаратуры. Записать на осциллограф нулевую линию (при вертикальном положении корпуса конвертера) и при соответствующем нагружении известной статической нагрузкой, осуществляемом следующим образом: к корпусу конвертера, расположенному горизонтально, на расстоянии lот оси его поворота прикладывается внешняя сила
 ,
как показано на рис. 3.2. Величина
момента от действия силы
,
как показано на рис. 3.2. Величина
момента от действия силы ,
необходимой для определения тарировочного
коэффициента нагрузки
,
необходимой для определения тарировочного
коэффициента нагрузки ,
в этом случае составляет
,
в этом случае составляет .
.Записать на осциллограф динамические нагрузки при повороте конвертера на слив, делая остановки в положениях, соответствующих углам
 и
и (поворот в каждом случае осуществляется
из положения конвертера, соответствующего
(поворот в каждом случае осуществляется
из положения конвертера, соответствующего (см. рис. 3.2).
(см. рис. 3.2).Определить расчетным путем параметры (массы и жесткости) системы.
Обработать экспериментальные данные, определив тарировочный коэффициент нагрузки, масштаб времени на осциллограмме, максимальную силу в упругой связи (вале), коэффициент динамичности и частотные характеристики механической системы. Результаты занести в табл. 3.1.
Определить динамические и частотные параметры системы для двух положений корпуса конвертера аналитически. Результаты занести в табл. 3.2.
Сделать сопоставления результатов теоретических и экспериментальных исследований, определив величину погрешности расчетов:
![]() .
.
Таблица 3.1 – Результаты экспериментальных исследований динамических и частотных характеристик системы механизма опрокидывания конвертера
|
|
Динамические характеристики |
Частотные характеристики | ||||||
|
h*, мм |
|
|
|
|
|
Т, с |
f, Гц | |
|
|
|
|
|
|
|
|
|
|
* Результаты измерений по осциллограмме.
Таблица 3.2 – Результаты аналитического расчета динамических и частотных характеристик системы механизма опрокидывания конвертера
|
|
|
|
Т, с |
f, Гц |
|
|
|
|
|
|